1
Изобретение относится к нреобразователям угловой величины в кодовую и может быть исиользовано в системах автоматического унравлепия с дифров1)1м вычислительным устройством.
Известны иидукциоиные датчики угла с зубчатыми ве1гцами, состоян1,ие из иодвижного и неподвижного статоров и ротора-модулятора. В статорах со стороны зубнов укладываются круговые обмотки, записываемые через носледовательио соединеппые резистор и дроссель от нсточиика ностоянного иапряжеиия. При вращении ротора с иостояииой скоростью О) нериодически из.меняется индуктивность обмотки, в результате чего на иидуктивности наводится иеременная составляющая напряжения. Разность фаз выходных сигналов с нодвижного и неподвижного статоров индук 1ионного датчика иронорциоиальна углу поворота подвижного статора отиосительно неподвижного.
Недостатком такого датчика является взаимное влияние электромагиитных полей нодвижного и неподвижного статоров (влияние можно выразить коэффициеитом взаимоиндукции М), что ириводит к зиачительиой ногрешностн измереиия угла виутри нолюсного деления датчика.
Целью изобретения является новышение ТОЧИОСТ11 измерения угла иутем комаеисаппи
2
взаимного влияния электромагиитиых полей ста1оров датчика.
С этой целью в предложенный датчик В1 едены в цени 1Н1тан11я нодвнжпого и ненодвижпого с1аторов датчика 1|)анс(|))рма горы, нодключеииые к фазосдвнгаю1цпм четырехполюсникам.
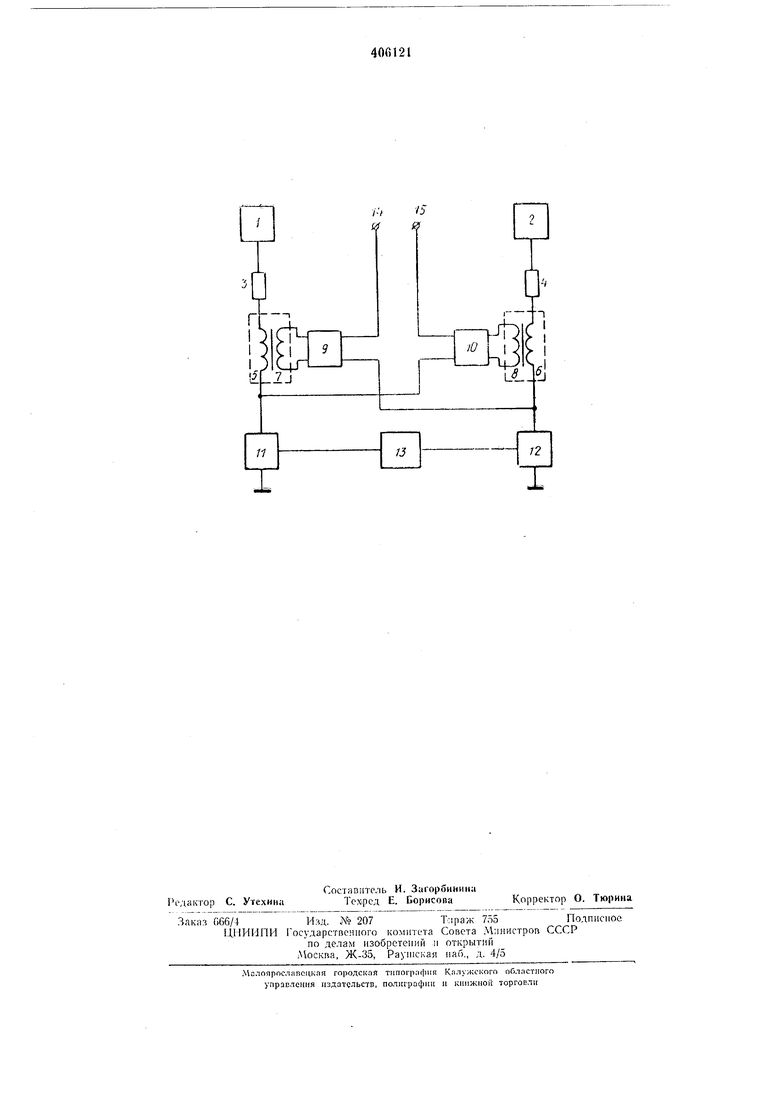
Схема датчика угла нредставлена на чертеже, где обозначены: источники питаппя /, 2, резисторы 3, 4, первичные обмотки 5, 6 трансформаторов, вторнчные обмоткн 7, 8 трансформаторов, фазосдвпгающие че1ъфехполюсннки 9, 10, в качестве которых могут быть испо.тьзовапы RC-, / L-звенья, обмотка // неподвижного стат-ора, обмотка 12 нодвижного статора, ротор-модулятор /,V, выходпая цень 14 юдвижного статора н выходная цень 15 неподвижиого статора.
Источник нитаиия / через резистор 3 н нервнчную обмотку 5 трансформатора соединен с обмоткой/У ненодвнжного статора. Источпнк нитания 2 через резнстор 4 и первнчную обмотку 6 второго трансформатора соединен с обмоткой 12 подвнжного статора. Вторичиая обмотка 7 первого трапсформатора соединена со входом четырехполюсннка 9, выход которого соединен последовательно с выходной цепью 14 нодвижного состава. Вторичная обмотка второго трансформатора соедцнепа со входом четырехнолюсника W, выход которого соединен последовательно с выходной ценыо 15 неподвижного статора. ЛЗыходиые сигналы датчнка образуются в цепях 14 и 15. Обмотки //, 2 статоров индуктивно снязаны с ротором-модулятором 13. При вран1,еиии ротора-модулятора с ностоянной скоростью (О периодически изменяются индуктивности обмоток статоров. В резу;1ьтате на выходах обмоток статоров возннкают /1/. и /2л, близкие ио форме к синусоиде (oZ, где Z - число зубцов статора (ротора-модулятора). Э. Д. С-/V/. обмоткн нодпилчного статора сдвинута ио фазе но отноHiemno к /1. на величину (p Za, где а-угол иоворота входной оси. Вследствие паразитной иидуктивиости связи обмоток // и 12 номнмо основных составляюиаих . и /2/. иа обмотках статоров возникают э. д. с. взаимной индукции /1,„ Х, 1-2 ,„ К,/ /. / где К., , , h - коэффициенты, характеризуюи1,11е иаразитиую нндуктивиую связь между обмотками статоров, которые складываются с ооювными составляю1цими U llL , ; 2 /2/. + 2.„; И вносят погрешность в измеряемый угол. Величина погрешности измерения угла лгожет быть нредставлепа выражением: sin(Za + ) h 7. . и, sin (Zj. -|- j.) В датчике угла иоворота составляющие /1„и /2,„ комиеисируются ВЫ.Х.ОДНЫМИ наиряжеииями четырехиолюспиков, на вход которых подаются наиряжения обмоток 7 и 8. Компенсация достигается соответствующим выбором коэффициентов передачи трансформаторов и четырехполюсников при последовательности .соединения выходпых цепей четырехиолюспиков и датчика. В результате выходные сигналы датчика равиы liux - l/. i 1 11ЫХ l-il. Предмет изобретения Датчик угла поворота вала, содержащий источпики питапия, подключенные через резисторы к обмоткам подвижного и неподвижного статоров и ротор-модулятор, отличающийся тем, что, с целью компенсации взаимного влияния электромагиитиых полей статоров датчнка, в иего введеиы два трансформатора и два фазосдвигающих четырех юлюсника; причем первичная обмотка одного трансформатора включена носледовательпо в пень питапия подвижного статора; вторичная обмотка этого трансформатора соединена со входом одного из фазосдвнгаюн 1их четырехиолюсников, выходная цепь которого соединена последовательно с выходной цепью иенодвижного статора, а первичная обмотка второго трапформатора включена последовательно в цень гпггания неподвижного статора; вторичная обмотка этого трансформатора соединена со входом второго фазосдвигаюHiero четырехполюсника, выходная цепь которого соединеца последовательно с выходной ценью иодвижиого статора.