Из основиого авт. св. N° В 3052 извеетно устройство для измерения производительности роторного экскаватора. Оно еодержит даг-шк погонной нагрузки, датчики скорости движения и угла наклона транспортера роторной стрелы экскаватора, усилитель, интегратор ii еииусно-косинусный вращающийся трансформатор. Ротор трансформатора связан с датчиком угла наклона стрелы. Для повыщения точности и надежности устройства оно снабжено дополнительным сииусно-коеинусным вращающи1мся трансформатором, ротор которого, свлзанный с ротором основного синусно-косинусного вращающегося трансформатора, подключен через фазочуветвительный выпрямитель на вход усилителя, а статорная обмотка - на выход его.
В предлагаемом устройстве, являющемся дальнейщим развитием и соверщенствованием изобретения но авт. свид. № В 3052, обеспечена возможность повышения точности измерения производительности роторного экскаватора тем, что в цень питания синусно-косинусного трансформатора включен регулятор напряжения с запоминающим элементом и иитегратором, который соединен с выходом усилителя посредством узла управления.
Узел уиравления может быть вьшолнен в виде блок-1контактов, контакторов ускорения электродвигателей привода транспортера со
встроенным датчиком погонной нагрузки.
Регулятор напряжения может быть выполиеи в виде кинематически связанных индукционного иотенцпал-регулятора и электродвигателя, обмотка управления которого посредством узла управления соедИНена со вторичной обмоткой выходного трансформатора усилителя.
Цепь включения узла управления посредство.м счетчика импульсов может быть соединена с частотным датчпком скоростн движения ленты транспортера, а узел управления можгт быть соединен с элементом регулировки коэффициента усиления усилителя.
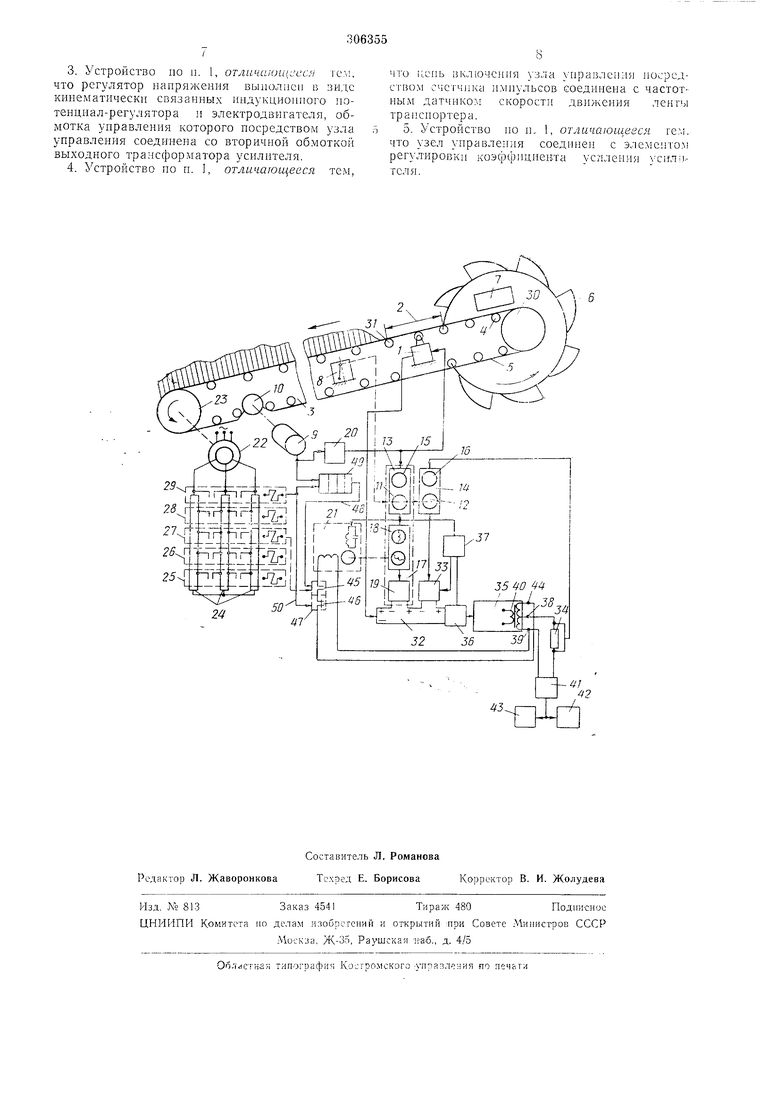
На чертеже показана схе.ма опиеываемого устройства.
Устройство для измерения производительности роторного экскаватора включает датчик 1 ПОГ01И10Й нагрузки, например, индуктивного типа, расположенный под измерительным участком 2 транспортера 3 роторной стрелы экскаватора вблизи места 4 загрузки ленты 5 транспортера горной массой, поступающей из ковшей роторного колеса 6 черезпитатель 7, датчик 8 угла иаклона роторной стрелы к горизонту и датчик скорости движения транспортера. В качестве датчика скорости испол.:,зуется бескоитактпый частотный та огенер-1тор 9, например, иидукторного тииа, кинематически связанный с OTK.TOHHIOIJUIM оараоаио-м К) транспортера. Чувствительный элемент, например, маятникового тшш датчика 8 угла наклона кинематически связан с роторами // и 12 сннусно-косинусиых вращающихся трансформаторов 13 и 14, статоры 15 п 16 которых установлены на роторной стреле. Цепи иитання узла 17 комненеацтпт веса тары, состоящего нз последовательно включенных вращающегося трансформатора 13, индукционного нотеиннал-регулятора 18 и вынрямителя 19, и датчика 1 ногонной нагрузки ирисоедииены к выходу узла 20 скорости, выполненному, например, в внде преобразователя частоты выходного сигнала тахогенератора .9 в амплитуду напряжения постоянной частоты. Интегратор в виде двухфазного электродвигателя 21 кинематическн связан с потенциалрегулятором 18. В цепь обмотки ротора трехфазного приводного электродвигателя 22 с фазным ротором, кние:,1атнчееки связанного с ведущи1М бараоаном 23 транспортера, включепы пусковые сопротивления 24, секции которых в различных фазах соедииены между собой при номощм контактов контакторОЕ 25-29 ускорення привода, 1 кл10чаелн11х, например, в ф п1кц1П1 времеин последовательно. Включение пpo leжyточиого контактора 27 соответствует перемеиснию ленты траисиортера с момеита запуска привода от начала Ю транспортера за конец 31 нзмерительиого участка 2, а включение коитактора 29 - окоичанию процесса разгона электродвигателя 22, т. е. достижеиию установивщейся скорости леиты 5 транспортера 3. В контуре 32 сравнения после.товатсльно и встречно с разностью выходных ттапряженяй датчнка / погонной нагрузки п узла /7 колгпенсацнн веса тары включен выход фазочуг,ствптельпого выпрямителя 33, который через сннусно-косннусный врапи1ЮЩ1н 1ся трансформатор 14 соедпнеп с сопрот1Н леппем 34, включепным в выходпую цепь усилителя 35. Выход контура 32 сравнения нодключен ко входу усилителя 35 через мод)лятор 36 (для преобразования постоянного входного напрчженпя п переменное), цепь управлепия которого соедпнепа с псточником 37 нитання устройства. Цепи опорного напряжепня фазочувствительного выпрямителя 33 и П1пан1гя обмотки возбуждения электродвигателя 21 также соедипепы с источнцком 37 питания. К зажимам 38 и 39 выходного трансформатора 40 усилителя 35 через сопротивление 34 и вынрямнтель 41 подключена нагрузка 42 устройства (обмотка унравлепия магпнтного усилителя систе.мы авторегулнровання пронзводительностн, управляющего скоростью одного из основных электроприводов роторного экскаватора). 4 усилителя нодклювы ход го экскаватора, чей интегратор 43. К зажимам 39 и 44 трансформатора 40, соответствующим макси.мальному коэффнцнеиту усиления усилителя 35, через контакты -/5 и 45 узла 47 уПраИ.ция подключена обмотка управления электродвнгателя 21. День 48 включения узла унравлеиия прнсоединена к выходу счетчика 49 н.мпульсов, подключенного к выходу тахогенератора 9, а цепь 56 отключения связана с включеинем контактора 29 (пунктиром показано возможное выполнение ценн включения узла 47 управления, при котором цепь связаиа с включением контактора 27 уекорения привода). Устройство работает следующим обр;:30.м: (виачале дается краткое онисанне работы устройства в режиме измерения нронзводдтельностн экскаватора при ранее ско.мненсярованном выходно.м нанряжении датчика погонной нагрузки нри иезагруженной ленте транспортера, а затем-в режиме автоматической уетановкн «нуля устройства в процессе запуска транснортера). При работе роторного экскаватора выходнос иаиряженне датчика / погоиной нагрузки транспортера 3 роторной стрелы еоответствует весу тары и ногонно; нагрузке нзмернтельного участка 2 леиты 5 траненортера. В контуре 32 еравнення разноеть выход: 0го напряжепня датчика 1 н ранее установле-июго выходного нанряжения узла 17 компенсацнн веса тары, равного по абсолютпой величине выходному папряжеппю датчнка / при незагруженном нзмер ггельно.м участке 2, нронорцнональна текущей весовой нроизвод Г1ельности транснортера. Пронорциональность обеспечивается тем, что на обмотки возбуждения датчнка / н узел 17 компе-чсаIUHI веса тары нодается выходное напряжение узла 20 скоростн, а.мнлитуда которого соответствует скоростн движения леиты 5 транспортера. ilpii этом узел 47 управлення нод де11сгвн:см сигияла, ностугииощего по ненн 50 отключення от включенного контактора 29, отклю1ается, и ко1Г1акты 46 размыкаются. Благодаря действню автокомненсатора, образованного контуром 32 сравнения, модулятором 36, усилителе.м 35 и цепью обратной связн, состоящей нз вращающегося трансформатора 14 и вынрямителя 33, выходное яанряженне успл1ггеля, папример, в зажимах 38 н 39 также соответствует текуп1,ей производительности транснортера. С учетом того, что датчик ногонной нагрузки воспринимает нормальную составляющую веса горной массы, а в ценях ко.мненсацнн веса тары н обратной связн включены сннусно-косинусные вращающиеся трансформаторы, выходное напряжение уеилнтеля не зависит от угла наклона роторной стрелы.
в режиме автоматической установка «нуля в процессе запуска транспортера.
Изменение усилия, действующего па датчпк погонной нагрузки при незагруженной лейте трапспортера, папример, ввиду измепсния патяжепия леиты, приводит к уходу рапее установленного «пуля устройства, т. е. к погрешпостп определения пропзводительности тратюиортера. так как при этом выходное папряжение узла компенсации веса тары не полность о комнепсирует составляющую выходного напряжения датчика, обусловлеииую весом тары. Установка «нуля автоматнзирована и нропзводится в рабочем цикле транспортера роторной стрелы при каждом запуске электродвигателя 22 привода траиснортера 3 в промежутке временп, характеризугощемся отсутствием загрузки измерительного участка 2 (отсутстВИе загрузки измерительного участка обусловлено тем, что в условиях эксплуатации роториого экскаватора запуск питателя 7 осуществляется после достижения лентой установивщейся скорости, а измерительный участок в целях уменьщенля транспортного запаздывания раснолагается у места 4 загрузки пнтателем).
При зануске электродвигателя 22 привода транспортера 3, осуществляемом, паиримср. путем последовательного включения через определенные промежутки временп контакторов 25-29, но мере перемещения ленты 5 траиснортера 3 счетчики 49 и.мпульсов почсчитывают число импульсов, поступающих от частотного тахогенератора 9 (перед запуском электродвигателя 22 счетчик 49 импульсоз предварительно ебрасывается на «нуль).
При занолиенни всех раз рядов счетчик;; 4) импульсами, число которых еоответствует пере.мещеиию ленты 5 транспортера 3 с начала .(9 транепортера до конца 3 измернтельиого участка 2, т. е. оевобожденюо измерительного }частка 2 от горной массы, счетчнк 49 посылает сигнал (но непн 48 включения) ча включение узла 47 управлепня, при этом колтакты 45 за.мыкаются.
Прн включении узла 47 описанный выше автокомпенсатор охватывается дополнительной ценью отрицательной обратной . образованной электродвигателем 21 и ипдукциониым нотенциал-регулятором 18, в резул.тате чего образуется замкнутая система автоматической установки «нуля. При этом об.мотка управления электродвигателя 2 поцключается к выходу усилителя, и начинается нрои,есс становки «нуля устройства.
При налнчнн разности между выходными напряжениями датчика / и узла /7 компенсации вееа тары, а следовательно, и напряжения на выходе усилителя 35 система автоматической установки «нуля умеиьщает указар(ную разпоеть до мнни.маль1 ого (нулевого) значения, что осуществляется путем интегрирования выходного напряжения уснлител 1 и5 при номощи электродвигателя 21 и соответствующего изменення выходного напря;ксния индукционного потенциал-регулятора 18 (при вращении ротора электродвигателя 21).
Следует отметить, что включение узла 47
управления может быть сблокировано с включением промежуточного контактора 27, соответствующего отсутствпю загрузки измерительного участка 2 в процессе разгона электродвигателя 21, напрпмер, путем использования в качестве выходных контактов 46 узла 47 управления блок-контактов контактора 27.
С целью достижения необходимой точности установки «нуля устройства, мнннмальная
величина которого определяется напрял ением трогания электродвигателя 21, об:мотку управления электродвнгателя присоединяют к зажимам 5,9 и 44 усилителя 95, соответствующим повыщениому коэффициенту усиления усилнтеля 35.
По окончании разгона электродвигателя 21 по цепи 50 от включенного контактора 29 отключается узел 47 управления (контакты 46 размыкаются). При этом система автом тнческой установки «нуля размыкается, а узел 17 компенсаНИн веса тары «запоминает вновь установленное выходное напряжение, соответствугощее найденному «ну,1Ю устройства, в виде положення подвнл;ной обмоткм
потенциал-регулятора 18, кинематически связанной с ротором электродвнгателя 21. Одновременно происходит сброс н установка на «нуль разрядов счетчика 49. С учетом того, что промежуток времени, нспользуемый для автоматической установхн «нуля устройства, пмеет место при любом технологическом процессе экскаватора вследствие регламентируемых перерывов рабочего цикла (передача смен. профилактические
осмотры оборудования и т. д.), становит;я очевидной возможность устранения погрещиости устройства, обуслов,тенной изменением выходного сигнала датчика погонной нагрузliii при незагруженной ленте транспортера, непосредственно в рабочем цикле экскаватора без регламептироваиной необходимости для этой цели работы транспортера BXO,IOстую.
Предмет изобретен н я
1.Устройетво для измерения производительности роторного экскаватора по авг. св. № 288339, отличающееся тем, что, с целью
новыщ&ння точности измерения, в цепь питания сннусно-косинусногг) трансформатора нключен регулятор напряжения с заломинаюн;. элементом н интегратором, который соеД1:нен с -выходом усилителя посредством уз,та
правления.
2.Устройство но н. 1. отличающееся те.м, что -зел управления 15ынолнеп в внде блоккон га KTOI; контакторов ускорения электродвь гатслс привода транснортера со встроенным
3.Устройство no п. I, отличсаои.аис.ч тем, что регулятор напряжения выполнен в виде кине1матически связанных пндукциоппого потенциал-регулятора II электродвигателя, обмотка управления которого посредством узла управления соединена со вторичной обмоткой выходного трансформатора усилителя.
4.Устройство но н. , отличающееся тем,
что iiciib включения узла управления посредством счетчика импульсов соедииена с частотным датчиком скорости движения ленты транспортера.
5. Устройство ио и.. 1, отличающееся гем. что узел управления соединен с элементом регулировки коэффициента усллення yciwiiтеля.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ РЕЖИМА РАБОТЫ РОТОРНОГО | 1966 |
|
SU184534A1 |
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| ДАТЧИК ПРОИЗВОДИТЕЛЬНОСТИ | 1969 |
|
SU236054A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| УСТРОЙСТВО для ПРЕДОХРАНЕНИЯ МЕТАЛЛОКОНСТРУКЦИИ | 1973 |
|
SU379745A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1966 |
|
SU179684A1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
Г TD I т @|
50
4
47
Гг pV
;ш..
Llfp. 4- f - г.
MR
Ъ-Л7
