Известны устройства для измерения производительности роторных экскаваторов, содержащие датчик погонной нагрузки, датчики скорости движейия и угла наклона транспортера роторной стрелы экскаватора, усилитель, интегратор и синусно-косинусный вращающийся трансформатор, ротор которого связан с датчиком угла наклона стрелы.
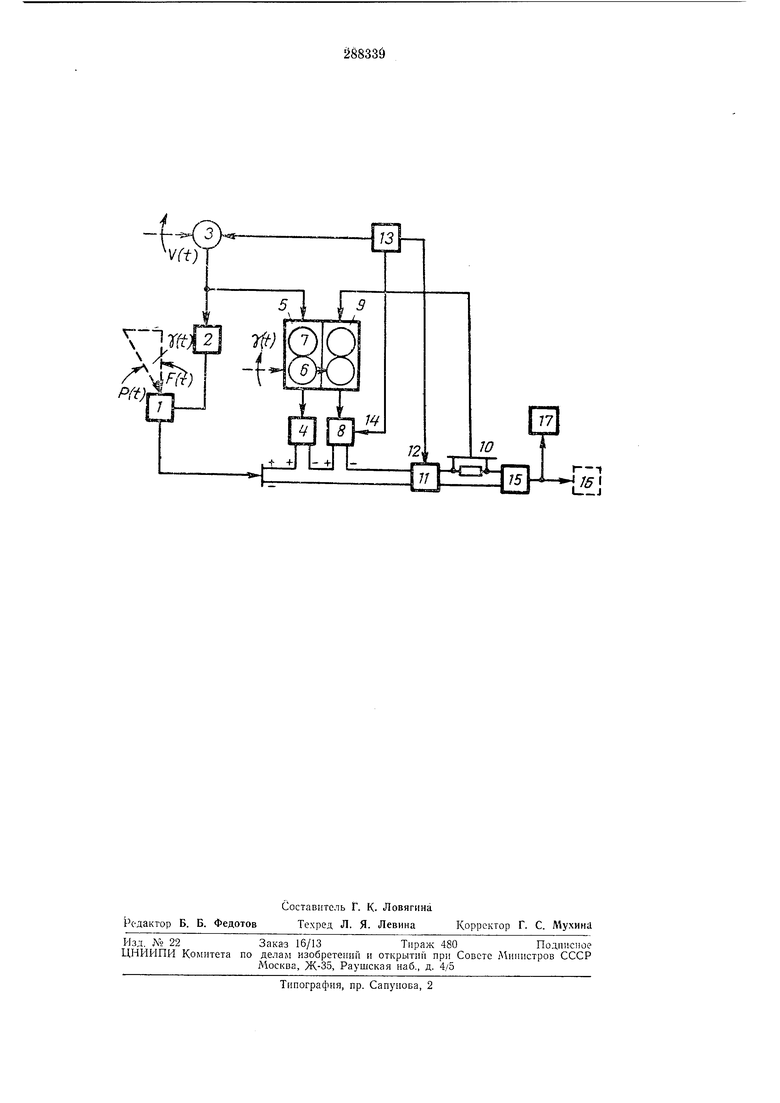
Предлагаемое устройство отличается от известных тем, что, с целью повышения его точности и надежности, оно снабжено дополнительным синусно-косинусным вращающимся трансформатором, ротор которого, связанный с ротором основного сниусио-косинусного вращающегося трансформатора, подключен через фазочувствительный выпрямптель на вход уснлителя, а статорная обмотка - иа его выход.. Па чертеже представлеиа блок-схема устройства.
Датчик / погонной нагрузки (например, теизометрического типа) транспортера роторной стрелы через выпрямитель 2 с ф)льтром соединен с выходом датчика 3 скорости лепты трансиортера. В качестве датчика скорости можно использовать бесконтактный генератор, нанример индукторного типа.
Последовательно и встречно с выходом датчика / включен выход выпрямителя 4 с задатчиком веса тары, соединенный через сннусно-косинусный вращающийся трансформатор 5
с датчнком 3 скорости двнження ленты. Ротор 6 трансформатора кинематически связан с чувствительным элементом (маятникового типа) датчика угла наклона роторной стрелы к
горизонту, а статор 7 установлен на роторной стреле экскаватора.
Последовательно и встречно с разностью выходных напряжений датчика / и вынрямителя (т. е. в контур сравнения) включен выход
фазочувствительного выпрямителя 8, который через второй синусно-косинусный вращающийся трансформатор 9, связанный с чувствительным элементом датчика угла наклона, соединен с сопротивленнелг W, включенным в выходную цепь усилителя П. Ко входу усилителя // подключен контур сравнения, а для иреобразоваиия ностоянного входного нанряжения в переменное нмеется модулятор, цень 12 ynpasлеиня которого соединена с нсточником 13 пнтанпя. Цепь 14 опорного нанряжения фазочувствнтельиого выпрямителя 8 также соединена с источ иком питания 13.
К выходу ус 1лителя 11 через выпрямптель 15 подключена нагрузка 16 (обмотка управлення магнитного усилителя системы авторегулирования производительности, уиравлярощего скоростью одного из основных электроприводов роторного экскаватора). выходу усилителя иодключен интегратор /7 постоянного (или перемеииого) напряжения. Устройство работает следующим образом. При вращении тахогенератора датчихча 3 его выходное напряжение пропорционально скорости V(t движеппя ленты (ток возбуждеппя генератора стабилизирогап). Датчик / погонной нагрузки восприним;1ет нормальную составляюп ую F(t) усплип P(t), прпложеппого к датчику, а его выходпос напряже П е пропорционально величине V(t) F(i). Усилие P(t}, действуюи ее на датчик 1, и составляющая F(t) равны: P(t)Pu{t)+Pr F(t)F,,(()+F,, где РМ(О (0 - соответственно усилие и его нормальная составляющая, соответствующие весу материала (грунта); РтиЕ-г - соответственно усилие и его нормальная составляющая, соответствующие весу тары (вес ленты и ролшсоопоры, под которой установлены датчики ногопной нагрузки), причем F(t)P(t)cosy(t), y(t) - угол наклона роторной стрелы к горизонту. Следовательно, выходное напряжение датчика / ногонной нагрузки (0(ОсОЗу(/)+Ях(ОсОЗу(0. Для компенсации веса тары и изменений в функции Y(O его составляющей, воспринимаемой датчиком 1 погонной нагрузки, благодаря действию синусно-косинусного вращающегося трансформатора 5, подключенного к датчику 3 скорости, и питающего выпрямителя 4 в соответствии с нропорционал:л1ым весу тары сигналом от задатчика в виде, например, потенциометра, включенного на выход выпряителя 4, из напрялсения /д,,,, вычитается напряжение, соответствующее весу тары: U,P,V(t)cosy(t). Компенсирующее напряжение UK, т. е. выходное напрял ение выпрямителя 8, в результате действия синусно-косинусного вращающегося трансформатора 9 равно t/вых COSY(O и при достаточио большом коэффициенте усиления усилителя // практически уравновсщивает напряжение вх /м (OV(OcosY(o. т. е. г:/, с/в, и (0((0, где 9(0-текущая производительность роторного экскаватора. Следовательно, выходное напряжение устройства независимо от значения угла наклона роторной стрелы пропорциопально текущей производительпости роторного экскаватора. Его устанавливают изменением коэффициента передачи цепи обратной связи (10, 9, 8) устройства, например, путем изменения величины сопротивления 10 связи. Благодаря включению в цепь формирования компенсирующего напряжения фазочувствительного выпрямителя, цепь опорного напряжения которого соединена с источником питания устройства, с изменением нолярности входного и фазы выходного напряжений автоматически изменяется нолярность компенсирующего напряжения, т. е. исключаются переход отрицательпой обратной связи в полол птельную (при случайных изменениях полярности входного сигнала) и самовозбуждение устройства, а также обеснечивается линеаризация характеристики устройства при малых значениях сигнала, поскольку вентили фазочувствительного выпрямителя даже при малых значениях выпрямленного напрялсеипя коммутируются значительным по амплитуде опорным напрял ением. Благодаря отсутствщо каких-либо двил ущихся элементов вторичная часть устройства обладает новыщенной устойчивостью к вибрации и сильной запыленности. Устройство примеиимо для измерения текущей производительности конвейерных установок с переменным углом наклона, используемых в других отраслях промышленностп. Предмет изобретения Устройство для измерения производительности роторного экскаватора, содержащее датчик погонной нагрузки, датчики скорости движения и угла наклона транспортера роторной стрелы экскаватора, усплитель, интегратор и синусно-косипусный вращающийся трансформатор, ротор которого связан с датчиком угла наклона стрелы, отличающееся тем, что, с делью иовыщения точности и надежности, оно снабл ено донолнительным синусно-косннусным вращающимся траисформатором, ротор которого, связанный с ротором основного синусно-косинусного вращающегося трансформатора, подключен через фазочувствительный выпрямитель на вход усилителя, а статорная обмотка - на его выход. te Wf2 W
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВО,! РОТОРНОГО ЭКСКАВАТОРА.ИТЕЛЬНОСТИ | 1971 |
|
SU306355A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ РЕЖИМА РАБОТЫ РОТОРНОГО | 1966 |
|
SU184534A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| ДАТЧИК ПРОИЗВОДИТЕЛЬНОСТИ | 1969 |
|
SU236054A1 |
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для управления двухрукавным формовочным пескометом | 1975 |
|
SU679948A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |