Изобретение отиоеитея к конструкциям траншейных экскаваторов, в чаетности к конструкциям экскаваторов, предназначенных для вскрытия уложенных в грунт магистральных трубоироводов.
Известен траншейный экскаватор для вскрытия трубопроводов преимуш,ествеино большого диаметра, включающий базовую маiHHiiy, установленный па коиеольиой раме рабочий орган в виде роторов с рейками и рамами, еоедииеииых поперечным отвалом, прикреплеииым к рамам роторов, направляющие ролики и привод.
Такой экскаватор для работы в зимиее время неприемлем, так как рабочий орган может разрабатывать грунт I-IV категории. С целгзю обеспечения разработки грунта повь шенной прочности в предлагаемом экскаваторе па иижиих рамах рабочего органа роторами укреплен отвал в виде шнека с установленным ла ним но ходу движения и гнариирио закреилеииым на консольной раме иодборш,иком. Подборшик смонтирован на консольной раме шарнирно с возможностью поворота в вертикальной илоекости.
При этом шиек вьшол.неи с доиолиительным приводом, имеющим цепную нередачу с объединенными с направляющими роликами звездочками, взаимодействующими с рейками роторов.
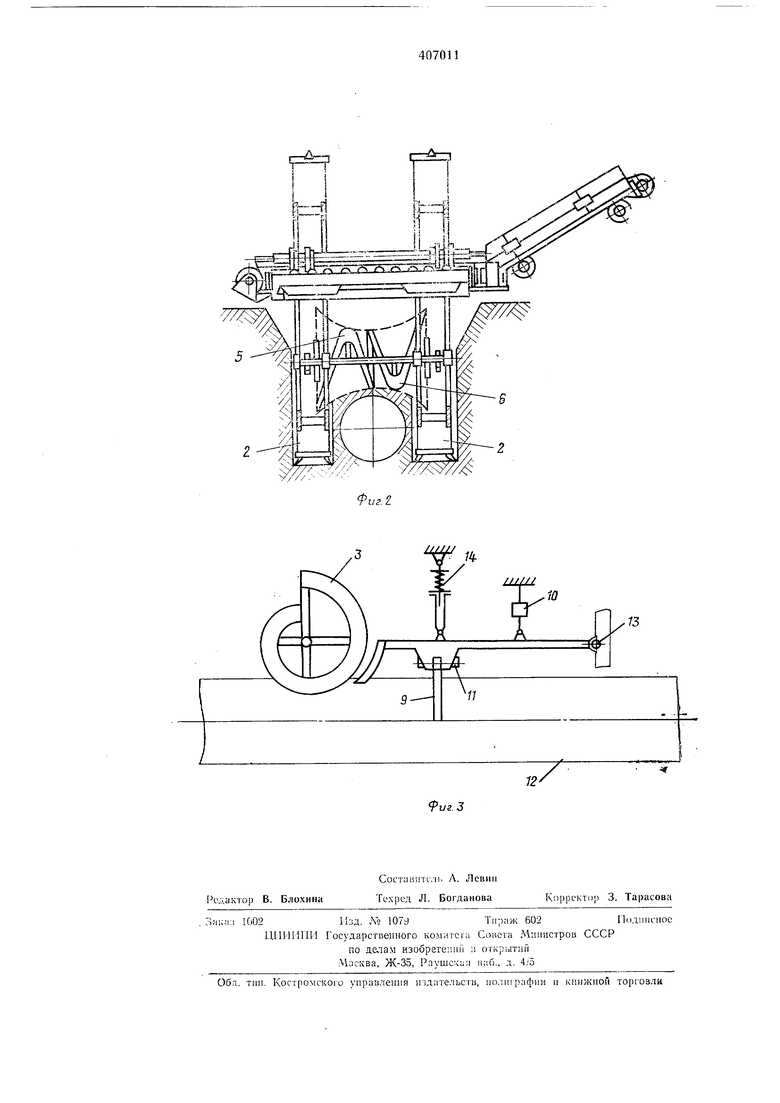
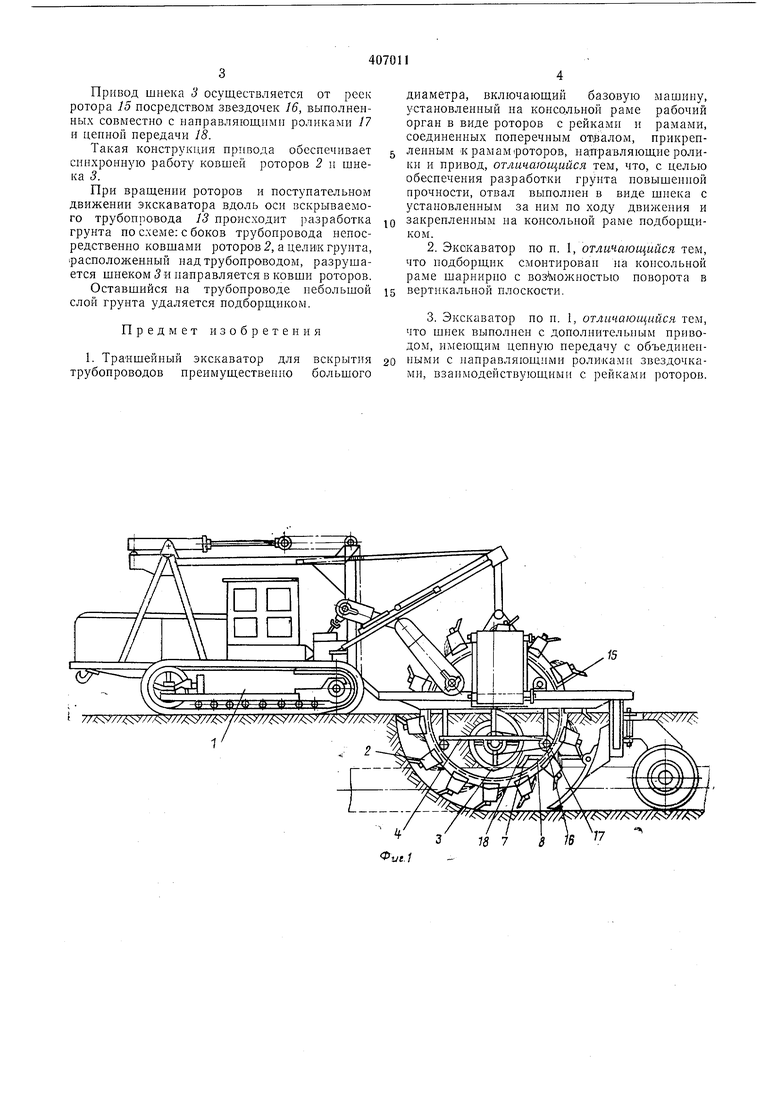
Па фиг. изображен предлагаемый траншей ый эке}, в рабочем положении, вид сбоку; на ф.ч 2 - то же, вид спереди; па ф.;Г. 3 - подборщик.
К раме тягача / навешивается рабоч1и 1 орган экскаватора, выполненный е двумя роторпм) 2, враьчаюишмися в одинаковые стороны, и шнеком 5, установлеипым на нижних рамах 4 рабочего органа между роторами. За
iHiiCKOM, состояшим из двух разнонаправленных витков 5 и 6, установлен подборщик, состояищ из зачистителя 7 и продольно балки 8, на которой установлены датчики .9 и 10 приборов управления рабочим органом ио горнзонта.ли и вертнкалн. Датчик 9 прибора управления ио горизоитали крепится к продольной балке 8 с помощью палыи. JL ось кото)ого параллельна оси трубопровода 12, а сам подборщик крепитея к раме рабочего органа
посредством другого пальца J3, обеснечивающего поворот в вертикальной плоскости. Таким образом, иодборщик может перемещаться относительно трубопровода 12 в вертикальной и горизонтальной плоскостях проиорцноналыю отклонениям рабочего органа от оси трубопровода. Эти перемещения фиксируются датчиками 9и 10 приборов управления рабочим ojiranoM. Постоянный контакте трубопроводом 12 обеспечивается посредством прижимиого
устройства 14.
Привод шнека 3 осуществляется от реек ротора 15 посредством звездочек 16, выполненных совместно с направляющнмп роликами 17 и цепной передачи 18.
Такая конструкция привода обеспечивает синхронную работу ковшей роторов 2 и шнека 3.
При враш,еппи роторов и поступательном движении экскаватора вдоль оси вскрываемого трубопровода 13 происходит разработка грунта по схеме: с боков трубопровода непосредственно ковшами роторов 2, а целик груита, расположенный над трубопроводом, разрушается шнеком 5 и направляется в ковши роторов.
Оставшийся на трубопроводе небольшой слой грунта удаляется подборщиком.
Предмет изобретения
1. Траишейный экскаватор для вскрытия трубопроводов преимущественно большого
диаметра, включающий базовую машину, установленный на консольной раме рабочий орган в виде роторов с рейками и рамами, соединенных поперечным отвалом, прикрепленным к рамам1роторов, направляющие ролики и привод, отличающийся тем, что, с целью обеспечения разработки грунта повышенной прочности, отвал выполнен в виде шнека с установленным за ним по ходу движения и закреплеиным на консольной раме подборщиком.
2.Экскаватор по п. , отличающийся тем, что подборщик смонтироваи на консольной раме шарнирно с возможностью поворота в вертикальной плоскости.
3.Экскаватор по п. 1, отличающийся тем, что шнек выполнен с дополпительным приводом, имеющим цепную передачу с объединенными с направляющими роликами звездочками, взаимодействующими с рейками роторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина для вскрытия трубопроводов | 1979 |
|
SU887740A1 |
| Рабочий орган многоковшового траншейного экскаватора | 1985 |
|
SU1263765A1 |
| СПОСОБ ВСКРЫТИЯ ТРУБОПРОВОДА И ВСКРЫШНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2244865C2 |
| Траншейный экскаватор для вскрытия подземных трубопроводов | 1984 |
|
SU1198166A1 |
| АГРЕГАТ ДЛЯ ВСКРЫТИЯ, ПОДКОПА И УДАЛЕНИЯ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 1992 |
|
RU2034960C1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| Цепной рабочий орган траншейного экскаватора | 1981 |
|
SU1030500A1 |
| УСТРОЙСТВО РАЗРАБОТКИ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 2000 |
|
RU2252302C2 |
| Многоковшовый цепной экскаватор поперечного копания Т.Т.Халикова | 1979 |
|
SU863784A1 |
| Способ закрепления оврагов и устройство для его осуществления | 1989 |
|
SU1704648A1 |