1
Изобретение относится к автоматике и может быть применено в системах автоматического управления (САУ) полетом и .посадкой летательных аппаратов.
Для обеспечения безопасности полета летательного аппарата особенно при автоматическом заходе па посадку и посадке применяют высоконадежные САУ, состоящие из резервированных звеньев. В большинстве случаев обеспечить безопасность удается простым удвоением количества элементов звена, т. е. дублированием. Однако при отказе одного из дублированных элементов звепа часто невозможно определить какой именно элемент отказал. В полете это может привести к аварийной ситуации, например в том случае, если отказал один из дублированных элементов САУ, дающих информацию о положении самолета в пространстве (гировертикали, высотомеры и т. д.). Для повышения безопасности полета в таких случаях применяют звенья САУ, информация от которых остается достоверной после отказа одного из резервированных звеньев.
Известно резервированное звено САУ такого типа. Звено состоит из двух основных (однотипных) элементов (например, из гировертикалей), дающих информацию об изменении входного возмущения (крена, тангажа), селектора уровня, блока сравнения, интегратора
и дополнительного элемента (например, датчика угловой скорости), дающего информацию о скорости изменения входного возмущения.
Интегратор и элемент, дающий информацию о скорости изменения входного возмущения, представляют собой аналог элемента, дающего информацию об изменении входного возмущения.
Однако при некоторых видах отказов основных элементов интегратор подстраивается под сигнал отказавшего элемента и выдается ложная информация. Цель изобретения - повышение надежности работы резервированного звена.
Для этого предлагаемое звено дополнительно содержит два ключа, два сравнивающих устройства и устройства выбора наибольшего и наименьшего сигналов, входы которых соединены с выходами датчиков входных сигналов, а выходы через сравнивающие устройства и ключи - с соответствующими входами интегратора, выход которого подключен к одним из входов сравнивающих устройств.
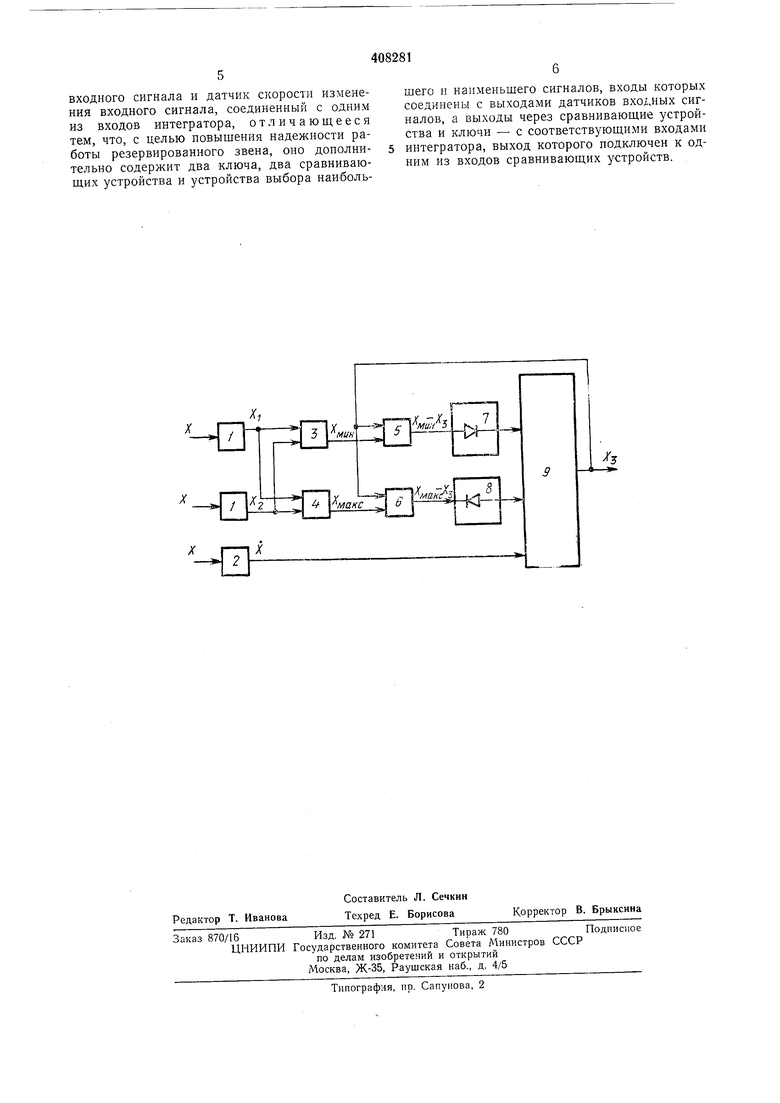
На чертеже дана блок-схема предлагаемого резервированного звена.
Устройство содержит два датчика 1 входных сигналов, дающих информацию Xi и Xz об изменении входного возмущения X; датчик 2, дающий информацию X о скорости из
менения входного возмущения X; устройство 3, выбирающее из двух сигналов ианменьщий; устройство 4, выбирающее из двух сигналов наибольщий; сравнивающие устройства 5 и 6; ключ 7 (например, диод), замыкающий цепь при появлении на его входе положительного сигнала; ключ 8 (например, диод), замыкающий цепь при появлении на его входе отрицательного сигнала; интегратор 9.
Устройство работает следующим образом.
.Пусть оба датчика исправны и их выходные сигналы равны Xi и Xz. Принимают ,
т. е. Лмин -Л2 л макс .
Если выходной сигнал Xs интегратора 9 будет больще или меньше выходных сигналов обоих датчиков 1, то начинает работать цепь подстройки, которая будет стремиться сделать сигнал интегратора 9 равным сигналу одного из датчиков 1.
Подстройка осуществляется следующим образом.
В том случае, когда на выходе сравнивающего устройства 5 сигнал отрицательный (Xz-Аз 0, так как ), ключ 7 разомкнут и эта цепь подстройки не работает. (В качестве ключа 7 может быть применен обь1чный диод, подключенный анодом к выходу сравнивающего устройства 5.)
На выходе сравнивающего устройства 6 сигнал такнсе отрицательный (Xi-Аз 0, так как ) ключ 8 замкнут и выходной сигнал интегратора 9 начинает уменьщаться, подстраиваясь к сигналу Xi (при замкнутых ключах 7 или 8 интегратор 9 оказывается охваченным глубокой отрицательной обратной связью, превращающей интегратор 9 в апериодическое звено). Параметры цепи подстройки (цепи отрицательной обратной связи) желательно выбирать так, чтобы постоянная времени апериодического звена была как можно Меньще. Уменьщение сигнала интегратора 9 Происходит до тех пор, пока не будет выполняться сооТнощение .
Пусть это соотнощение выполняется. Тогда КЛЮ1Ч 7 разомкнут, так как на выходе сравнивающего устройства 5 сигнал отрицательный или равен нулю (, так как ) и, следовательно, цепь подстройки не работает. Ключ 8 также разомкнут, так как на выходе сравнивающего устройства 6 сигнал положительный или равен нулю (Xi-Хз 0, так как , а значит эта цель подстройки отключена.
Таким образом, при исправной работе датчиков 1 выходной сигнал Хз интегратора 9 всегда или равен сигналу одного из датчиков 1 или его величина находится между величинами их выходных сигналов. Следовательно, в звене при исправной его работе имеются три достоверных сигнала, соответствующих входному возмущению X.
Пусть произощел отказ датчика скорости 2 и на его выходе появился ложный сигнал, интегратор 9 начинает интегрировать этот сигнал, но как только перестанет выполняться
соотношение () начинает работать цепь подстройки, которая вновь сделает сигнал интегратора достоверным.
Рассматривая работу звена в случае отказа одного из датчиков 1, принимают, что до отказа выполнялось соотнощение . Пусть Xi начнет увеличиваться. Так как в этом случае выщеуказанное соотношение также выполняется, то сигнал интегратора 9 не
меняется до какого бы значения не увеличивался Xi и, следовательно, два сигнала (Xz и Хз) остались достоверным несмотря на отказ одного из основных элементов. Пусть Xi начнет уменьшаться. Как только
Xi станет меньще Хз на выдаче сравнивающего устройства 6 сигнал станет отрицательным (, так как ), ключ 8 замкнет цепь подстройки и выходной сигнал Хз интегратора 9 будет уменьщаться почти с той же
скоростью, что и Xi. Изменение сигнала з интегратора 9 будет происходить до тех пор, пока Xi не станет меньще Xz. Как только это произойдет будет выполнено соотнощение и подстройка прекратится. Сигнал интегратора 9 не будет больще меняться, до какого бы значения не уменьшался сигнал Xi, а следовательно, остались достоверными два сигнала (Х и Хз) несмотря на отказ одного из датчиков 1.
Рассматривая последний случай, считают, что все три сигнала достоверны, т. е. Al ().
Пусть произошел такой отказ одного из датчиков 1, что его выходной сигнал остается неизменным Ji const при любых входных возмущениях.
Пусть затем начнет изменяться входное возмущение. Выходной сигнал Xz исправного датчика 1 станет меняться. При изменении
входного возмущения на выходе датчика скорости 2 появится сигнал X, соответствующий скорости изменения входного возмущения.
Так как выполняется вышеуказанное соотнощение, то цепи подстройки отключены и интегратор 9 начнет интегрировать сигнал датчика скорости 2. Выходной сигнал интегратора начнет изменяться в соответствии с изменением входного возмущения и, следовательно, нес.мотря на отказ одного из датчиков 1
вновь имеются два достоверных сигнала. Таким образом, любой одиночный отказ датчиков 1, 2 не выводит из строя резервированное звено. Это позволяет при подключении к звену пороговых устройств определить какой элемент звена отказал.
Звено наиболее целесообразно применять в тех случаях, когда требуется работоспособность звена после первого отказа, но невозможна установка на самолете третьего датчика 1 (например, на легких самолетах).
Предмет изобретения
Резервированное звено системы автоматического управления, содержащее два датчик
входного сигнала и датчик скорости изменения входного сигнала, соединенный с одним из входов интегратора, отличающееся тем, что, с целью повышения надежности работы резервированного звена, оно дополнительно содержит два ключа, два сравнивающих устройства и устройства выбора наибольщего и наименьшего сигналов, входы которых соединены с выходами датчиков входных сигналов, а выходы через сравнивающие устройства и ключи - с соответствующими входами интегратора, выход которого подключен к одним из входов сравнивающих устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU851335A1 |
| УСТРОЙСТВО ВЫБОРА СИГНАЛОВ | 2001 |
|
RU2208246C2 |
| Резервированное многокаскадное устройство | 1981 |
|
SU1069203A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2000 |
|
RU2179736C2 |
| П | 1973 |
|
SU389537A1 |
| Трехканальная резервированная измерительная система | 1983 |
|
SU1101828A1 |
| УСТРОЙСТВО ДЛЯ МАЖОРИТАРНОГО ВЫБОРА СИГНАЛОВ | 1972 |
|
SU335688A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ СВОЙСТВ СЛУЧАЙНОГО СИГНАЛА | 1972 |
|
SU355617A1 |
| СПОСОБ МНОГОКРАТНОГО РЕЗЕРВИРОВАНИЯ СИСТЕМ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ | 1967 |
|
SU192274A1 |