Изобретение относится к электрогидравлическим следящим приводам и может быть использовано при построении резервированных приводов систем автоматического и дистанционного управления.
Наиболее близким к предлагаемому является электрогидравлический следящий привод I содержащий последовательно соединенные датчик обратной связи, первый сумматор, усилитель, исполнительный механизм, датчик положения, второй сумматор, компаратор и ключ, и последовательно соединенные третий сумматор, интегратор и инвертор, выход которого соединен со вторым входом второго cyNMaTopa и первым входом третьего сумматора, а вход датчика обратной связи соединен с выходом исполнительного механизма t lНедостаток данной схемы состоит в том, что требуется расширение порога срабатывания компаратора относительно минимс1льно возможной величины в связи с изменением максимальной скорости перемещения рабочего канала при изменении условий эксплуатации и внешней нагрузки и нечувствительности к изменению этих условий максимальной скорости выходного сигнсша
электронного контрол-ьного канала,что понижает надежность привода.
Цель изобретения - повышение надежности привода.
Указанная цель достигается благодаря тому, что привод содержит ограничитель напряжения, вход которого соединен с выходом второго сумматора, а выход - со вторым входом интегра10тора.
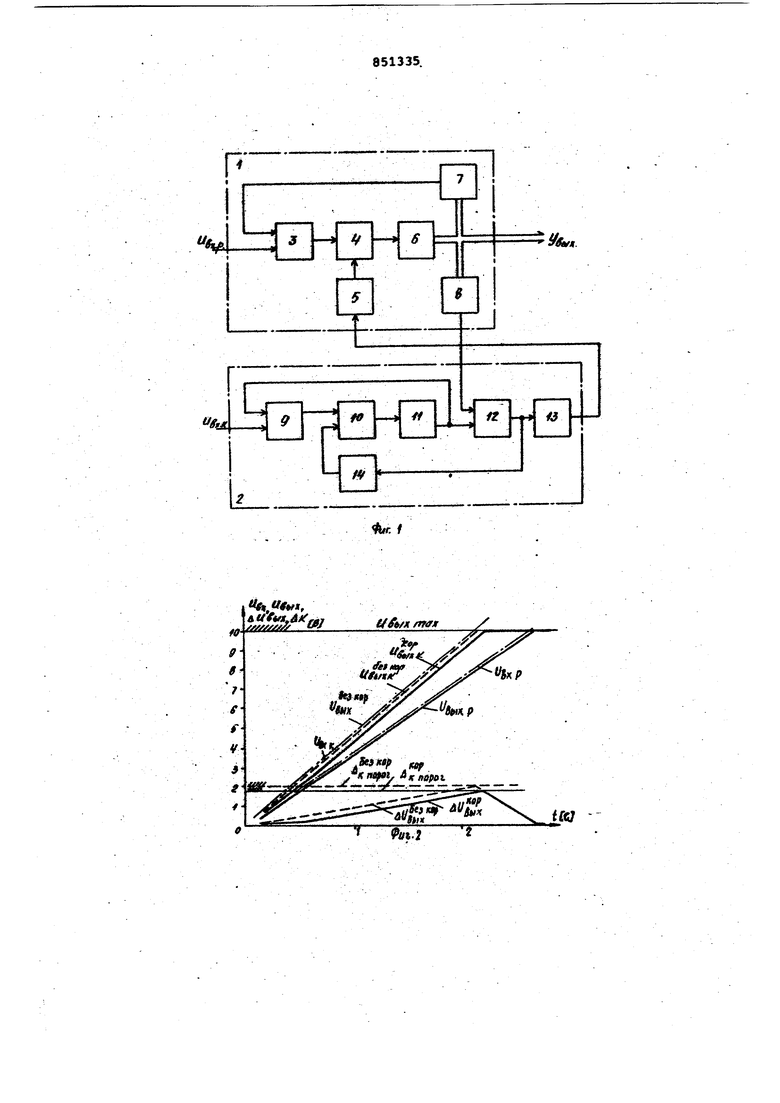
На фиг. показана схема привода; на фиг. 2 - диаграмма отработки приводом плавно изменяющихся входных сигналов на фиг. 3 и 4 - диаграммы
5 отработки приводом скачкообразных входных сигналов при разных начальных условиях; на фиг. 5 - пример отказа рабочего канала привода вследствие, поступления на его вход . ложно20го управлянлцего сигнала.
Привод состоит из рабочего 1 и электронного контрольного 2 каналов, соединенных с независимыми источниками входных сигналов Ujx.p и Ug. Ра бочий канал состоит из первого сумматора 3, электрогидравлического усилителя 4, ключа 5, исполнительного ме- , . ханизма б, датчика 7 обратной связи и датчика 8 положения выходного элемента рабочего канала. В электронном контрольном канале 2 один из двух входов третьего сумматора 9 соединен с источником входного сигнала , выход третьего сумматора 9 соединен с первым входом интегратора 10, выход интегратора 10 подключен ко входу инвертора 11, выход инвертора 11 соединен со вторым входом третьего сумматора 9 и со вто рым входом второго сумматора 12, пер вый вход второго сумматора 12 соединен с выходом датчика 8 положения выходного элемента рабочего канала, выход второго сумматора 12 соединен со входом компаратора 13 и через ограничитель 14 напряжения - со втоpESM входом интегратора 10, а выход компаратора 13 соединен со входом ключа (электрогидравлического клапана) 5 рабочего канала. Привод работает.следующим образом. Рабочий канал привода под действи ем входного сигнала обеспечивает пропорционсильное перемещение его выходного элемента (.). При этом на выходе датчика 8 положения выход ного элемента рабочего канала формируется электрический сигнал, пропорциональный перемещению рабочего канала, а, следовательно, и входному сигналу Ugyp При работе рабочего канала в линейной зоне по скорости, т.е. когда никакой его элемент не на сыщен, скорость изменения си1:1ала на выходе датчика 8 положения выходного элемента рабочего канала равна скорости входного сигнала, а погрешность воспроизведения входного сигнала определяется статической и дина мической точностью рабочего канала, зависящей от коэффициентов усиления и допусков на элементы рабочего кана ла. При ступенчатом изменении входного сигнала возможно насыщение электрогидравлического усилителя 4 по расходу рабочей жидкости, обусловлен нов наличием ограничения в проходных сечениях золотникового распределителя, что приводит к ограничению скорости изменения сигнала на выходе датчика 8 положения выходного элемен та рабочего канала. Задача электронного контрольного канала состоит в имитации основных характеристик рабочего канала: коэффициента усиления, добротности и мак симальной скорости изменения выходного сигнала, а также в формировании выходного сигнала, аналогичного выходному сигналу датчика положения 8 вьоходного элемента рабочего канала, и в сравнении указанных сигналов между собой и выдаче команды на клю 5 рабочего канала для его отключени при превышении разности сравнивавмых сигналов установленной величины Требуемое значение коэффициента усиления и добротности контрольного канала обеспечивается соответствующим выбором коэффициен-foB усиления третьего сумматора 9 и интегратора 10. Выходным сигналом контрольного канала является сигнал на выходе инвертора 11. Сравнение выходных сигналов контрольного канала и датчика 8 положения выходного элемента рабочего канала и выдача сигнала на отключение рабочего канала осуществляется вторым сумматором 12 к компаратором 13. Без. учета вновь введенной корректирующей связи между выходом второго сумматора 12 и вторым входом интегратора 10, максимальная скорость выходного сигнала контрольного канала определяется величиной максимального напряжения на выходе третьего сумматора 9 и коэффициентом передачи интегратора 10. Используя специальное устройство для ограничения выходного напряжения третьего сумматора 9, или принимая во внимание его естественное ограничение и выбирая соответствующим образом коэффициент передачи интегратора 10, в исходных (нормальных) эксплуатационных условиях максимальная скорость изменения сигнала на выходе контрольного канала устанавливается равной (в пределах допусков) номинальной или фактической максимальной скорости изменения сигнала на выходе датчика 8 положения выходного элемента рабочего канала. При наличии корректирующей отрицательной обратной связи между выходом второго сумматора 12 и вторым входом интегратора 10 максимальная скорость изменения выходного сигнала контрольного канала автоматически регулируется в функции относительной разности выходного сигнала контрольного канала и сигнала датчика 8 положения выходного элемента рабочего канала в ограниченном диапазоне, определяемом ограничителем 14 напряжения и соответствующем диапазону изменения максимальной скорости выходного сигнала датчика 8 положения выходного элемента рабочего канала в заданных условиях эксплуатации. Если, например, известно, что максимальная скорость выходного сигнала датчика 8 положения выходного элемента рабочего канала изменяется в пределах i.50% от номинального значения, то уровень выходного напряжения ограничителя 14 устанавливается таким,чтобы максимальная скорость интегрирования сигнала коррекции составляла бы 50% от максимальной скорости интегрирования выходного сигнала третьего сумматора 9. При исправной работе привода в линейной зоне и без учета корректирующей связи между выходом второго
сумматора 12 и вторым входом интегратора 10 рассогласование между выходными сигналами датчика 8 положения вьпсодного элемента рабочего канала и электронного контрольного канала (условное рассогласование U() определяется разностью входных сигналов Ujjy,p и Llgy,y, а также технологическими и эксплуатационными допусками на характеристики элементов каналов. При наличии же корректирующей связи это рассогласование уменьшается, так как контрольный канал в некотором диапазоне рассогласований отслеживает перемещение рабочего канала. Точность слежения определяется соотношением коэффициентов корректирующей и основной обратных связей контрольного канала. До момента насыщения ограничителя 14 напряжения условное рассогласование между выходными сигналами контрольного и рабочего каналов уменьшается на величину, определяемую выражением
6еч,.кор.
rf .
О ц .- ,
iwv.
( )
где ь условное рассогласование между выходными сигналами контрольного и рабочего каналов без учета корректирующей связи; К, - коэффициент усиления первого сумматора 9; Kj - коэффициент передачи интегратора 10 по цепи выходного сигнала первого сумматора 9;
Kft - коэффициент передачи интегратора 10 по цепи корректирующего сигнала, KI - коэффициент усиления второго, сумматора 12. Величина условного рассогласования между выходными сигналами контрольного и рабочего каналов, при котором происходит насыщение цепи коррекйии, определяется из уравнения
/..,.8es.top.V If If u
. насмм-шж. 1 -.. у.л
(К,-к,-44 ,) n oгp. Ч И/
Левая часть этого уравнения является выражением, определяющим необходимую и достаточную величину максимальной скорости интегрирования корректирующего сигнала для выравнивания скоростей контрольного и рабочего каналов во всех условиях эксплуатации, а правая часть - номинсшьное значение максимальной скорости изменения выходного сигнала контрольного кансша.
Из этого уравнения
oro.ilK.
л ,.5ег.к.орч V Lebiv, ).
s ч-насыац.кор.
Максимальное уменьшение рассогласования между выходными сигналами контрольного и рабочего кайалов,соответствующее насьацению устройства 14 ограничения напряжения составляет величину
0
л,... п.Уур ,. / bwY.motr k, где п - отношение максимальной скорости интегрирования сигнала коррекции к мак5симальной скорости интег- риЕювания выходного сигнала третьего сумматора 9; Upj-p - максимальный сигнал на
выходе третьего сумматора 9 .
0
Фактическая величина рассогласования между выходными сигналами контрольного и рабочего каналов,контролируемая компаратором 13, равна
6ет,.«ор. 56 «оРл
25 -при (. /1
Н01се1ш,.кор.
, .. ..
, (6)
t l ubw/ лХ,-.
li-к.
0
. к , 5еч,.«ор.
.KOp. -прм UU, . ).кор
лых.
topSe.Kop n иогрчч „ f
.,--(&4,,. ()
Пусть на вход контрольного и рабочих каналов поступают управляющие сигналы, скорость изменения которых не превышает минимально возможной максимальной скорости изменения выходнбго сигнала рабочего канала,причем входные сигналы отличаются друг от друга на предельно допустимую величину, а характеристики каналов предельно неидентичны. Диаграмма фиг.З
показывает характер и величину изменения входных сигналов ( и U.p) i выходного сигнала рабочего канала (), выходного сигнала контрольного канала при отсутствии и наличии
корректирующей связи между выходом второго сумматора 12 и вторым входом интегратора 10 (и, и;..соответч COiV -« ,
ственно) , предельной разности выходных сигналов рабочего и контрольного каналов при отсутствии и наличии указанной цепи коррекции (U JJ; иьи °, соответственно) и требуемые значения настройки порогов срабатывания компараторов 13 в том и другом случае
(ffe...«,5 и t.JfP ) .
Из диаграммы видно, что при введении коррекции фактическое рассогласование между контрольным и рабочими каналами несколько уменьшается, в связи с чем для своевременного обнаружения неисправности в приводе Ъорог срабатывания компаратора 13при /{наличии корректирующей связи ( ) должен быть несколько уменьшен по сравнению с требуемым порогом, рассчитанным при условии отсутствия коррекции. Причем ..)кор. « порог ubiy. пред, где - расчетное значение пре-дельно возможного рассогласования меж ду выходными сигналами исправных конт рольного и рабочего каналов при отсутствии корректирующей связи между Ш:1ходом второго сумматора 12 и вторы входом интегратора 10. Пусть на вход контрольного и рабо чего каналов поступают скачкообразные входные сигналы при различных на чальных условиях (см. фиг. 3 и 4).Из диаграмм видно, что при отсутствии коррекции возможно существенное увели чение рассогласования л и, , что потребовало бы соответственного расширения порога срабатывания компаратора или введения перед ним элемента временной задержки. При введении же коррекции и при любых начальных усло виях скачкообразные входные сигналы не вызывают увеличения рассогласования между выходными сигналами относи тельно предельно возможных статических рассогласований. В связи с этим расширение порога срабатывания компа ратора 13 или введение временной задержки на его срабатывание не требуется. Отказ в рабочем или контрольном каналах приводит к увеличению рассог ласования между их выходными сигнала ми, срабатыванию компаратора 13 и к снятию гидропитания с рабочего канапа при помощи ключа - электрогидравлического клапана 5. Рассмотрим пример отказа рабочего канала вследствие поступления на его вход ложного входного сигнала (. За счет корректирующего сигнала конт рольный канал в ограниченном диапазоне подслеживает за рабочим каналом уменьшая гем самым рассогласование между своим выходным сигналом и выг ходным сигналом рабочего канала,что учитывается при выборе порога срабатывания компаратора 13 (в соответствии с выражением 6). Величина перемещения выходного элемента рабочего канала в результат ,отказа (,) пропорциональна порогу срабатывания компаратора 13. Так как при наличии корректирующей связи отсутствует необходимость в дополнительном увеличении порога срабатывания компаратора для устранения ложного отключения при скачкообразных входных сигналах , привод с введенной коррекцией при отказах имеет меньшее произвольное перемещение его выходного элемента, что повышает отказобезопасность привода. Таким образом, предлагаемый электрогидравлический следящий привод для систем управления летательных аппаратов повышает отказобезопасность привода за счет уменьшенШ возмущения со стороны привода на летательный аппарат при отказах рабочего канала путем уменьшения порога срабатывания системы контроля, благодаря введению коррекции скорости изменения выходного сигнала электронного к- нурольного канала по относительному рассогласованию между выходными сигналами контрольного и рабочего каналов. Крюме того, использование предлагаемого устройства позволяет уменьшить вес многоканального агрегата, благодаря замене одного модуля на электронный контрольный канал, нет необходимости в освоении новых технологических процессов и приобретении высококачественного программного оборудования для увеличения точности изготовления рабочих щелей золотниковых пар. Формула изобретения Электрогидравлический следящий привод, содержащий последовательно соединенные датчик обратной связи, первый сумматор, усилитель, исполнительный механизм, датчик положения, второй сумматор, компаратор и ключ, и последовательно соединенные третий cyNwaTOp, интегратор и инвертор, выход которого соединен со вторым входом второго сумматора и первым входом третьего сумматора, а вход датчика обратной связи соединен с выходом исполнительного механизма, отличающийся тем, что, с целью повышения Нсщежности привода, он содержит ограничитель напряжения, вход которого соединен с выходом второго сумматора, а выход - со вторым входом интегратора. Источники информации, принятые во внимание при экспертизе 1. Труды IV НТК, ММКБ Родина, 1976, с. 351 (прототип).
««ft , Ufvx AKfgj
MfM/Msiy Vf
tffb/H /ttff X
;
г
.i
.
ff,
fifjt tnax
yfcj KOp X
411 К
MX к
Мр
,
аил
-Ч--tec
квр K nopo
, / /r nopoi
1
ifcj
Чх.
,6c
f e3iic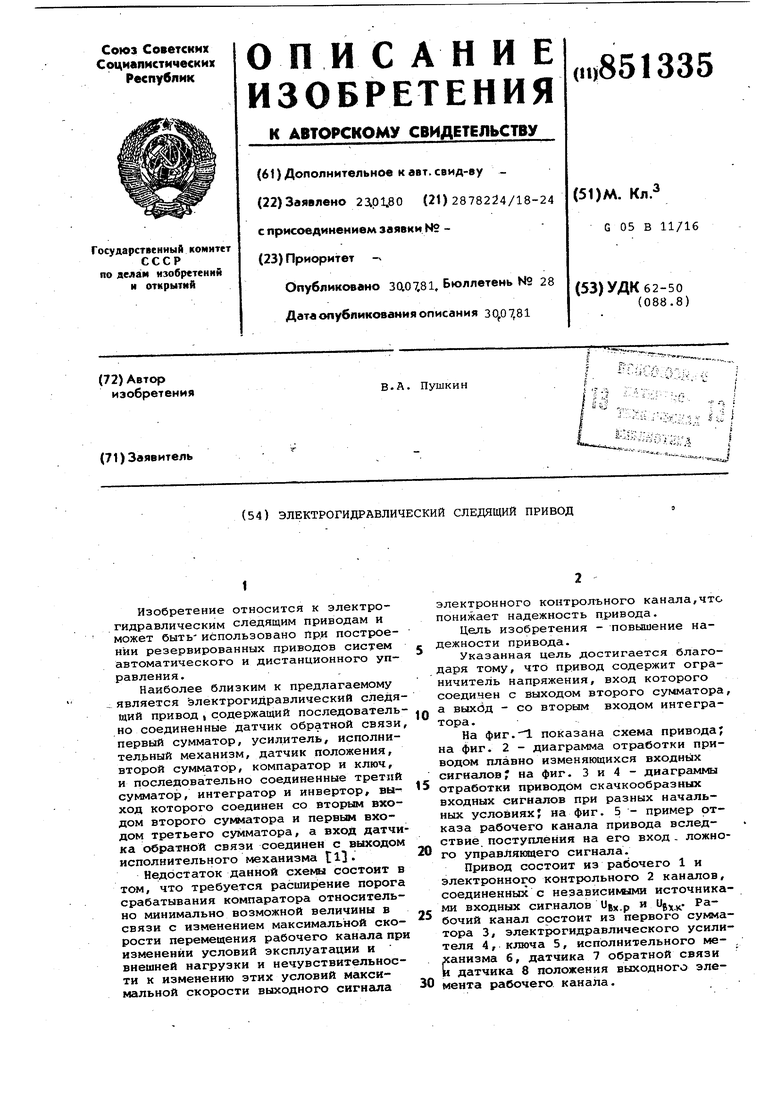
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1972 |
|
SU335446A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Многоканальная электрогидравлическая система | 1989 |
|
SU1707289A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ МОЩНОСТИ ТУРБОГЕНЕРАТОРА | 1971 |
|
SU436325A1 |