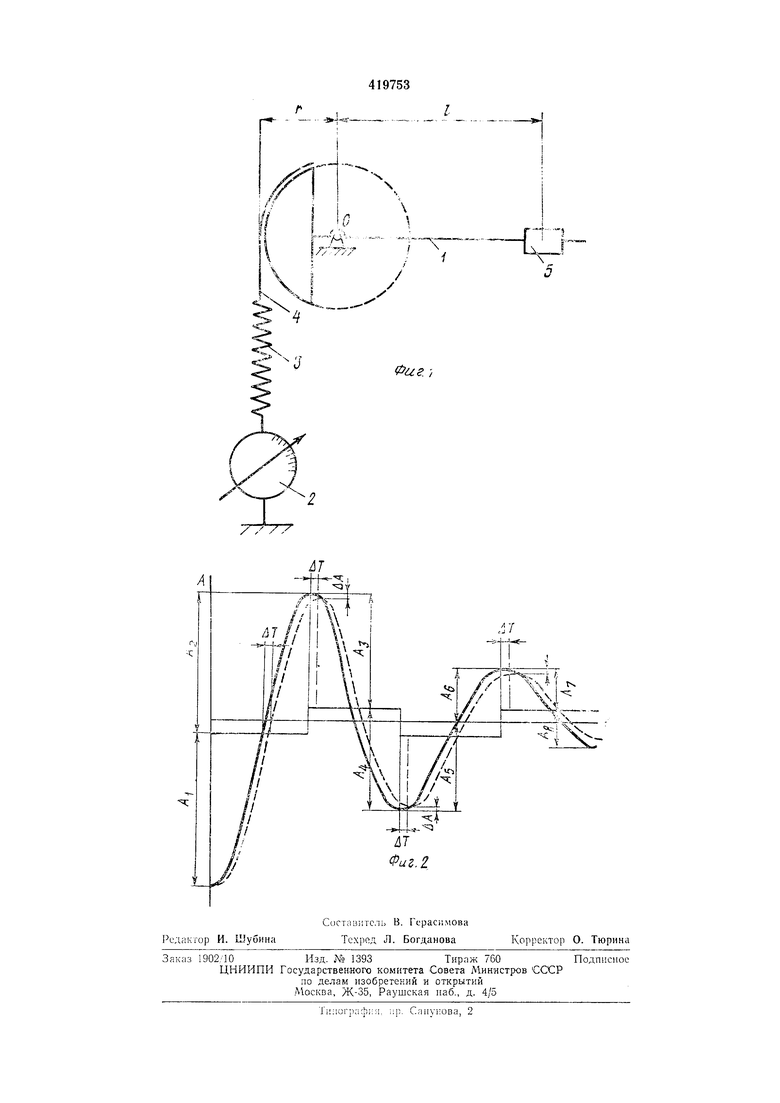
Изобретение относится к области тех;Н1 ческих измерений и может быть использовашо при экспер«1менталы101М исследова:иии сельскохозяйстБен:Ных машин :И тракторов. Известны способы динамическо : тари|ро;вки тяговых дишамОМетров, заключающиеся в том, что та1рируемый прибор нагружают переменной силой, кривую переменной силы записывают этим прибором и Обрабатывают. Однако известные способы требуют сложного тарировочного обо1рудования, так как ампЛИтуду и частоту переменено силы необходимо поддерживать с заданной точ;ностью. Цель изобретения - упрощение тарировочНОГО оборудования и исключение влияния его погрещиостей. Это достигается тем, что иагружеиие производят в режнме свободных затухающих колебаний. На фиг. 1 показааш схема устройства, peaл.изующего предлагаемый способ; на фиг. 2- прафики, поясняющие работу устройства. В качестве заг|рузоч-ного устройства служагг рычаг-маятник 1, ща|р1нир1но укрепленньи в точке 0. Тарируемый динамо метр 2 через пруЖИНу 3 и гибкую ленту 4 присоединен к рычагу-маятнику 1 так, что во время рабочих качаний рычага уцругая сила пружины действует на ие-изменном нлече г. Груз 5 действует на большом плече / и предназначен для созДания (Начального рабочего натяжения пружины 3. При малых углах качания рычага момент от действия лруза будет П1рактически постоя пшй величииой. Период колебанИЙ рычага онределяется приведенной упругостью последовательно соединенных ленты 4, пружИны 3 и дш1амо;метра 2. Коэффициенты жесткости динамометра /Сд и ленты MiHoro больше, чем коэффициент жесткости пружнны Кщ-,Коэффициент приведен ной упругости Л определяется из равенства -- - + - +-, откуда при условии, что Н Лп1)/(л, следует, что ,. Путем соответствующего выбора нружнн можно заставить рычаг колебаться с разны:м периодом Т и проводить нснытания в достаточно широком диапазоне частот. В исходном положении от груза 5 уравновешен моментом силы Рр упругости растянутой пр)жи-ны. Затем рычаг выводят из положения равновесия, нагружая его таким дополнительным моментом, чтобы нриращепие силы пружины стало не больше . Представленный самому себе маятник-|рычаг начинает качаться, а тарируемый прибор записывает затухающую косинусоиду. Общее сопротивление .колебательному движению рычага маятника можио представить суммой примерно постоя.шюго мо1мента трения Мтр и переменного момвнта, величина которого пропорциональна скорости. Амплитуды записанлой косннусоиды убывают в геометрической прогрессии, но не относительно нолон ения равновесия, а относительно линий, отстоящих Л1,р от ра-вновеанои, на расстояниях 4-к - КТ На фиг. 2 представлена пунктирной линией кривая, записанная тарируемым прибором, а сплошной - действительная сила загрузочного устройства. Несовпадение кривых обусловлено ошибками по амплитуде и фазе, которые зависят от частоты действугондо силы. Значения амн.титуд «оспнусоиды Л,,, /Ь, ЛБ ... подчиняются закону затухания АЗ Af, j4 а отношение носкольку значение Л| не Ла содержит cиcтe aтичeciкoй динамическом погрешности АЛ. Логарифмический декремент затухания целесообразно представить через сумму амнлитуд, цреобразоеав для этого известные отношения (). Прибавляя к .чсвой и правой ча1стн указанного соотношения (1) по бЛз, получим Л, + S 44 о + о или Л,,(1 + 8) . о (Л + Л,) откуда Лз(Лз + ) Очевидно Л,(Лз + Л) и А, (А, + А,)С другой стороны
м.
л л - 9 тР Л,-Л,-.2
(6)
ледовательно,
2 Р (Лз + A,i) - ь (А, + Ле)
-f о
(Л;; + Лб) - О (Л + AS)
(7)
1 + 6
Окончательно получим
g , (Лз + Л,) - (Л5 + Лб)
(8) (д+Ло)-(Л,+ Л8)
45 но фазе AT.
П р е д м е т и з о б р е т е н и я
Способ динамической тарировки тяговых динамометров, заключаюпшйся в том, что тарируемый прибор нагружают неременной силой, кривую перемсппой силы записывают этим прибором и об|рабатывают, отличающийся тем, что, с нелью упрон1,ения тарировочного оборудования н исключения влияния сто погр;чнн()стсй, нагружеиие производят в режиме свободных затухаюишх колебаний. Каждая амплитуда записи прибо.ра содержит систематическую динамическую погрешность ДЛ, которая добавляется к истинному 31начению Ли Лз Лзист + Д л, (9) Л,-Л„ст+ Д Подставляя 31начение амнлитуд в равенство (8), получим: f(Лз 11СТ + 4 ист) +2 Д л - (Л „с, IICl) - 2 Д л о ии, (А,, „ст + 6 ист) + 2 Д л - (Лу ис1 8 „сг) - 2 Д л отсюда следует, что систематическая ошибка АЛ не искажает результаты, и вычисленное таки:, образом значение б равно блст. Записанная прибором амнлитуда Л не содержит динамической ошибки, поэтому истинное значенне амплитуды Л211ст найдется как , а динамическая ошиока найдется из соотноше 1ияА Л :. (Л, + А, - Л, ПенооредстЕСНным 1измерением на записи затухаюш.ей косннусоиды находят значение пер- и нугем обработки ря;да значений - среднюю вел ичиТ.. , ну - (и ее случайную ОНШОКУ) для всех про4чих четвертей периода. Систематическая ошибка по фазе содержится лишь в первой четве|рти записи. ПОЭТОМУ сопоставлением средним значением - определяется ошибка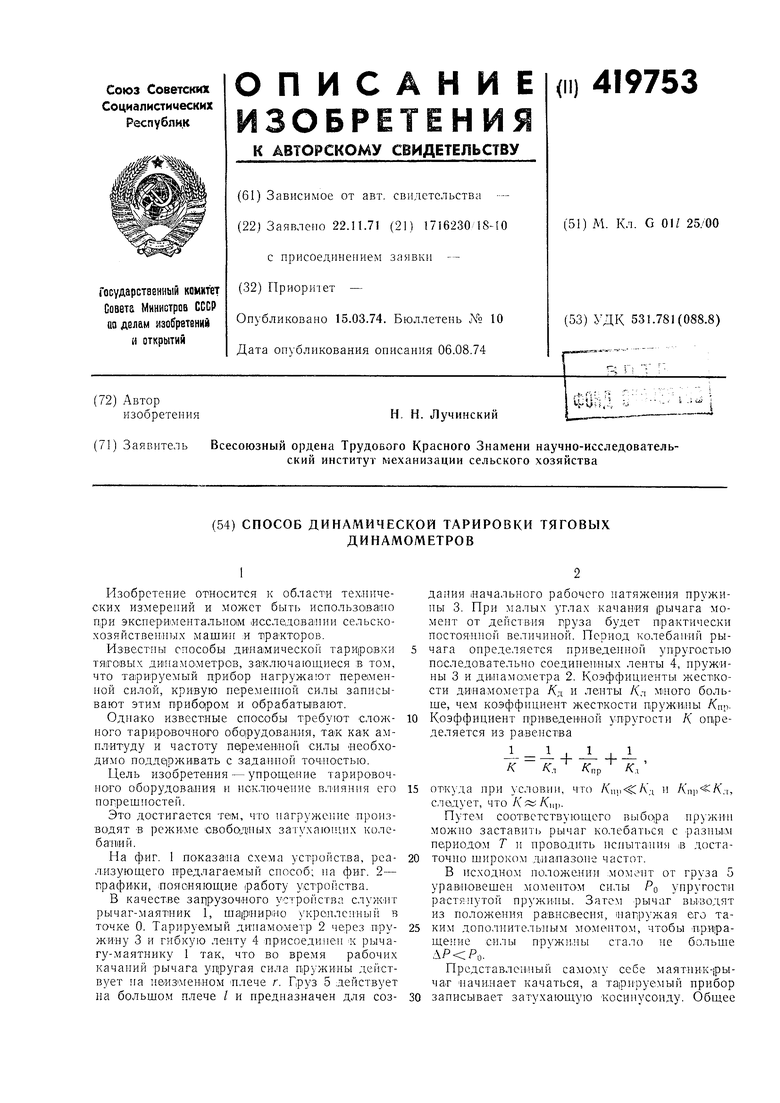

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для тарировки электродинамическогоСилОВОзбудиТЕля | 1976 |
|
SU849024A1 |
| УСТРОЙСТВО ДЛЯ ТАРИРОВКИ ДАТЧИКОВ ИМПУЛЬСНОГО ДАВЛЕНИЯ | 2004 |
|
RU2261421C1 |
| МЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ИСПЫТАНИЯ И ТАРИРОВКИ ПРИБОРОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ РЕГИСТРАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ ГРУНТА | 1968 |
|
SU1840383A1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНО-ТЕОРЕТИЧЕСКОГО ОПРЕДЕЛЕНИЯ СОБСТВЕННЫХ СИЛ ДЕМПФИРОВАНИЯ В УПРУГОМ ЭЛЕМЕНТЕ | 2013 |
|
RU2530474C1 |
| Тормозной маятниковый динамометр | 1939 |
|
SU59301A1 |
| ИНДИКАТОР ВЕРТИКАЛИ | 1973 |
|
SU385171A1 |
| Устройство для динамической градуировки динамометров | 1982 |
|
SU1067379A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРИСОЕДИНЕННЫХ МАСС, МОМЕНТОВ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ МОДЕЛЕЙ СУДОВ МЕТОДАМИ ИХ СВОБОДНЫХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425343C1 |
| Прибор для демонстрации колебаний пружинного маятника | 1991 |
|
SU1770972A1 |
| СПОСОБ ТАРИРОВКИ ТЕНЗОМЕТРИЧЕСКИХ ЦЕНТРОВ ШЛИФОВАЛЬНЫХ СТАНКОВ | 1972 |
|
SU330005A1 |