1
Изобретение относится к элементам систем контроля и автоматики, иредиазначенным для контроля положений перемещающихся деталей мехапизмов.
Известны дискретные датчики положения, содержащие П-образный магнитопровод, источник магнитодвижущей силы, герконы, срабатывающие при перемещении подвижного элемента. Недостатком таких датчиков является малое количество контролируемых положений.
В предложенном датчике продольные стержни магнитопровода снабжены обращенными друг к другу и расположенными в шахматном порядке зубцами, на которых установлены герконы. Такая конструкция позволяет увеличить число контролируемых положе 1Нй подвнжного элемента и повысить разрешающую способность.
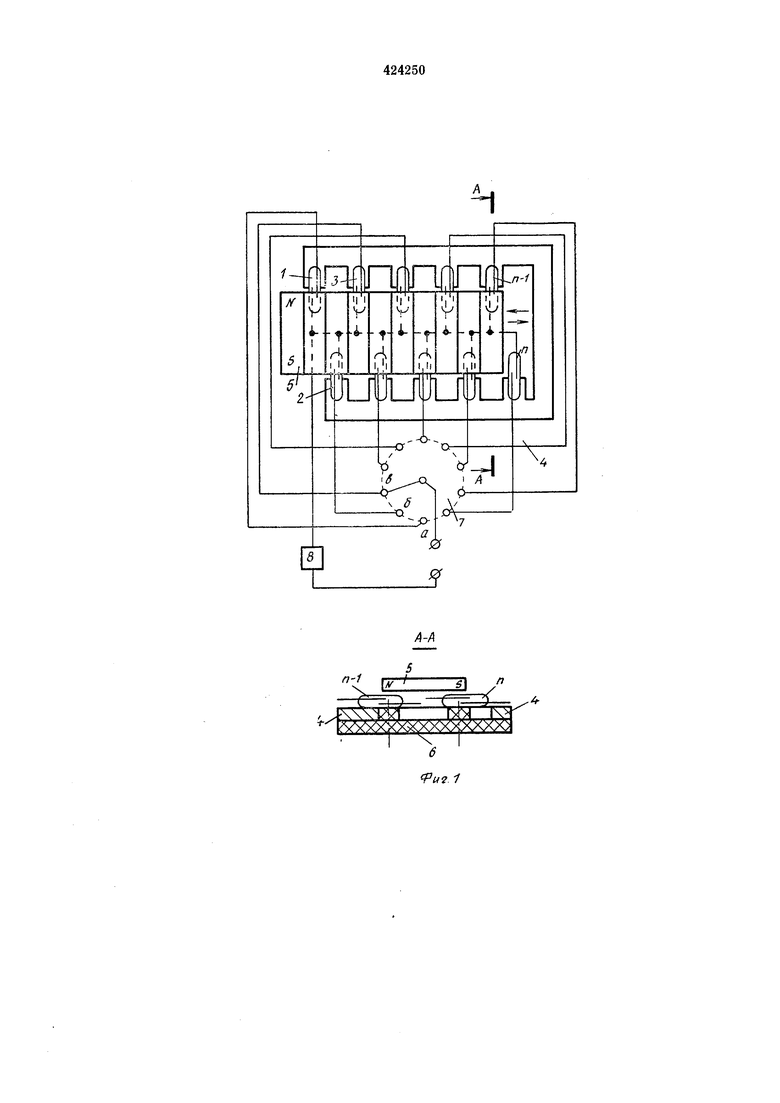
На фиг. 1 изображен предлагаемый дискретный датчик положения, вид в плане и разрез ио А-А; на фиг. 2 и 3 - модификации предлагаемого датчика.
Датчик положенпя включает в себя герметизированные магнитоуправляемые контакты (герконы) 1, 2, 3 ....«, П-образный магнитопровод 4; подвижный элемент 5, основание 6. Коммутатор 7 связывает электрический датчик с контролируемым объектом 8.
Продольные стержни магнитопровода 4 для усиления магнитного потока, проходящего через контакты герконов, выполнены зубчатыми и на этих зубцах размещены герконы таким образом, что их контакты находятся между торцовыми ребрами зубцов и боковыми ребрами подвижного элемента 5. С целью повышения разрешающей способности датчика зубцы магнитопровода 4 расположены в шахматном порядке. Подвижный элемент 5 кинематически связан с контролируемым перемещающимся объектом 8. Подвижный элемент может представлять собой (как это изображено на фиг. 1) расположенные в одной плоскости, включенные между собой параллельно и равномерно распределенные вдоль путп перемещения постоянные магниты. Один зажим герконов соединен в общую точку, а другой выведен на соответствующий зажим
коммутатора 7, подвижный контакт которого выполнен штепсельным.
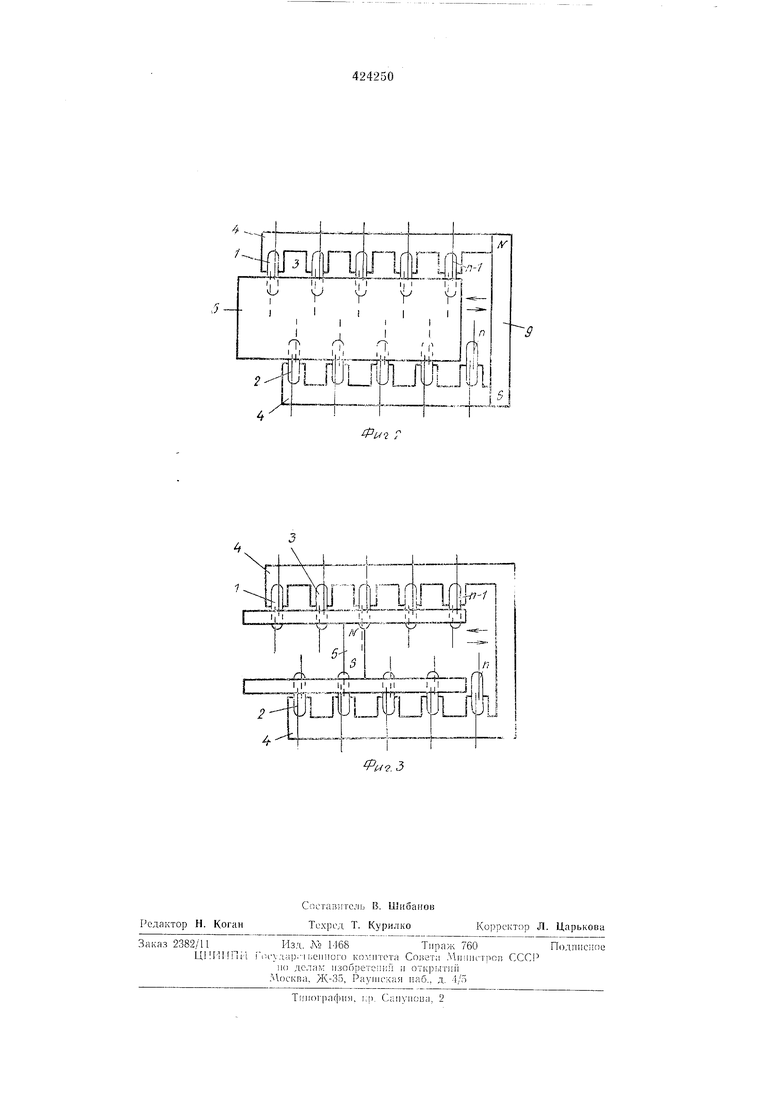
На фиг. 2 представлепа мод,ификация предлагаемого датчика положения, в которой м. д. с создается неподвижным постоянным
магнитом 9, включенным посредине между зубчатыми стержнями магнитопровода 4, а подвижный элемент выполнен в виде плоского магнитопровода. Конструкция такого датчика отличается большой простотой. Можно
гпкже выполнить датчик с подвижным элементом в виде одного магнита, снабженного полюсными наконечниками, как ноказано, например, на фиг. 3.
Принцин действия предлагаемого дискретного датчика положения сводится к следующему.
Пусть требуется переместитг конТ|Ю; мруемый объект 8 на величину, соответстзуюог по перемещению нодвижного элемента 5 па семь зубцов влево из положения, которое он занимав на фиг. 1 (геркопы датчика замкнуты под действием поля магнитов под1зиж1;ого элемента). Для этого коммутатор 7 устанавливают в положение в, как показано на фиг. 1. При этом включится двигатель объек1а 8, который будет перемещать этот объект, а вместе с и подвижный элемепт 5 до тех пор, пока последний не займет положения, при котором его правый крайнш- единичный постоянный магнит не окажется напротив геркона 2. Контакт геркопа 3 размыкается и
двигатель отключается. Движение объекта 8 прекращается, и слежение, ввиду полной отработки заданного перемещепия, заканчивается. По мере движения подвижного элемента 5 влево будут срабатывать и все остальные геркопы от п до 3. Однако, так как замкнута neiHj только j-epKona 3, срабатывание другпх герконов останется без последствий.
i р е д м с т н 3 о б р о т е и и я
Д1;скретньч-1 датчик положения, содержапдий П-образный магантонровод, источник магп1Г о,;виж п,ей силы, герконы, срабатывакяцие при перемещении подвижного элемента,
о т л и ч а ю HI, I-; и с я тем, что з нем, с пелью увеличения числа контролнруемы.х положений подвижного элементе; н новышення разрешающей снособности, про.:1ольные стержни маглиюирозодг. снабжены обран1енными друг к
другу и расноложеннымн в нтахматном порядке зубн.., на которых установлены герконы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных перемещений | 1980 |
|
SU949329A1 |
| Датчик угловых перемещений | 1973 |
|
SU468285A1 |
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| Кормораздатчик | 1987 |
|
SU1516072A1 |
| ГЕРКОНОВЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2032955C1 |
| Преобразователь угол-код | 1975 |
|
SU576579A1 |
| Потенциометрический преобразователь | 1978 |
|
SU771459A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОНСТРУКТИВНОГО ЭЛЕМЕНТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376239C1 |
| Механизм регулировки жалюзных решет очистки зерноуборочного комбайна | 1985 |
|
SU1371605A1 |
| ТАХОМЕТР ЧАСТОТНЫЙ ЯЛОВЕГИ | 2004 |
|
RU2258228C1 |
0 f
I : ,Ч
|. у) у
IiI
III
III
n rSrf
j .
Fnri-rIJ
/
Dt ||illp |p
Г ji iTi i,n
ЛиШ|Ор
b.B.iLi . I |ДДДдр Т ----- ---Д - -- чш J..-i.-j j J
..,,..--------™--- -l-
Iг
y.3
