1
yicTpoficTBo отиаситоя к автоматике и вычислительной технике и предаав наче«о для преобразователей угол - код.
Известны уст1роЙ1СТ1ва для июиытагаий иреобразователей угол-код, содержащие сочлененный с испытуемым преобразователем угол - «од задающий датчик и П|р1И1вод ра1вно1мерНОЙ ско рости, вход которого соединен с выходом генератора эталонной частоты « с первыми выходаМи блоков эталонных временных интервалов, выходы которых черев блок эталонных сищалощ соединены с первым вхоД|0:м блока сравнения силналов, к второму входу которого через блок оишалов реального кода подключен выход. иепьгауемоГО прео1б|разо1вателя угол-код, а выход блока сравнения сигналов соединен с входом блока в10Ш|рои13 ведения результата.
Тамие устройства имеют сложную схему из-за наличия дешифратора и недостаточно точиы.
Цель изобретения-упрощение устроЙ1ст|ва И1 повытенле его точ1ност1и.
Это достигается тем, что задающий датчи|к выполнен с дв|у|Мя кодирующими дорожками (с точка.М1И корракщий толыко одного знака), считывающие элементы которых со01Т1ветст1венно по1Д1Ключены к вторым входам блоков эталонных в)ременных интервалов.
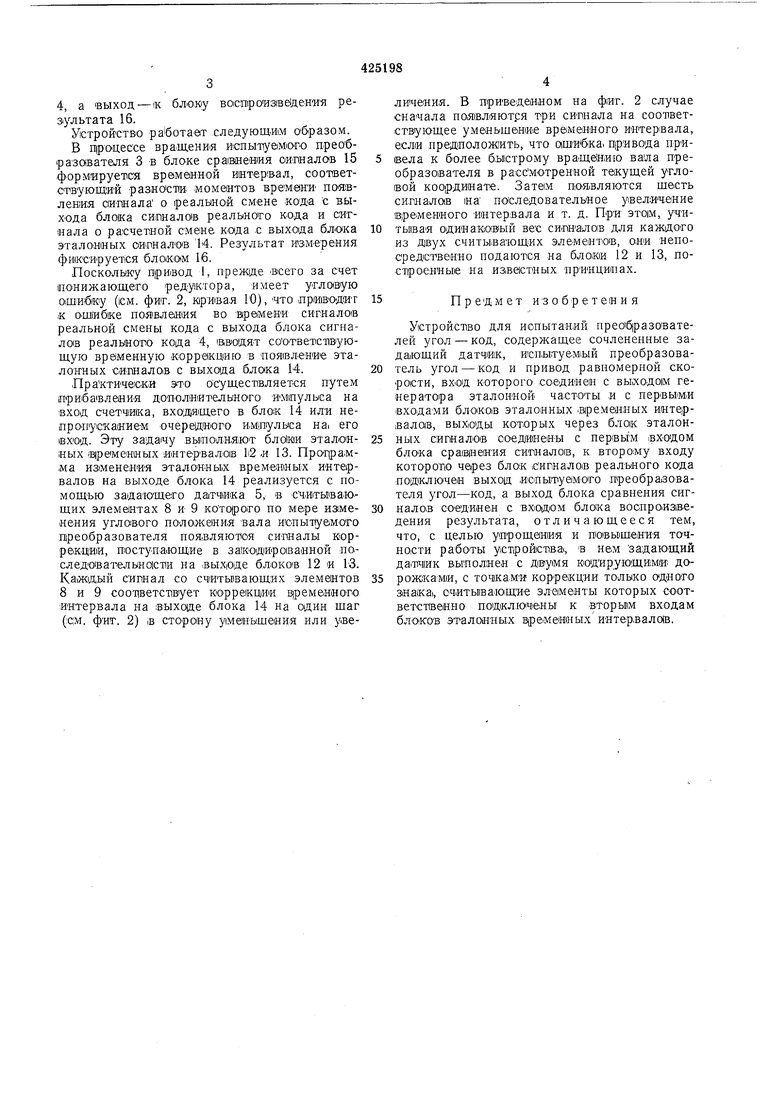
На фиг. 1 приведена функциональная схема у(ст ройст1ва для иопытан1ий преобразователей угол - код; па фиг. 2 поясняется принцип ра:боты устройства.
Привои равномерной скорости 1 подключен к генератору эталонной частоты 2. Вал привода же1стко соединен с июпытуемым преобразователем угол-код 3, выход которого подключен к блоку сипналов реального кода
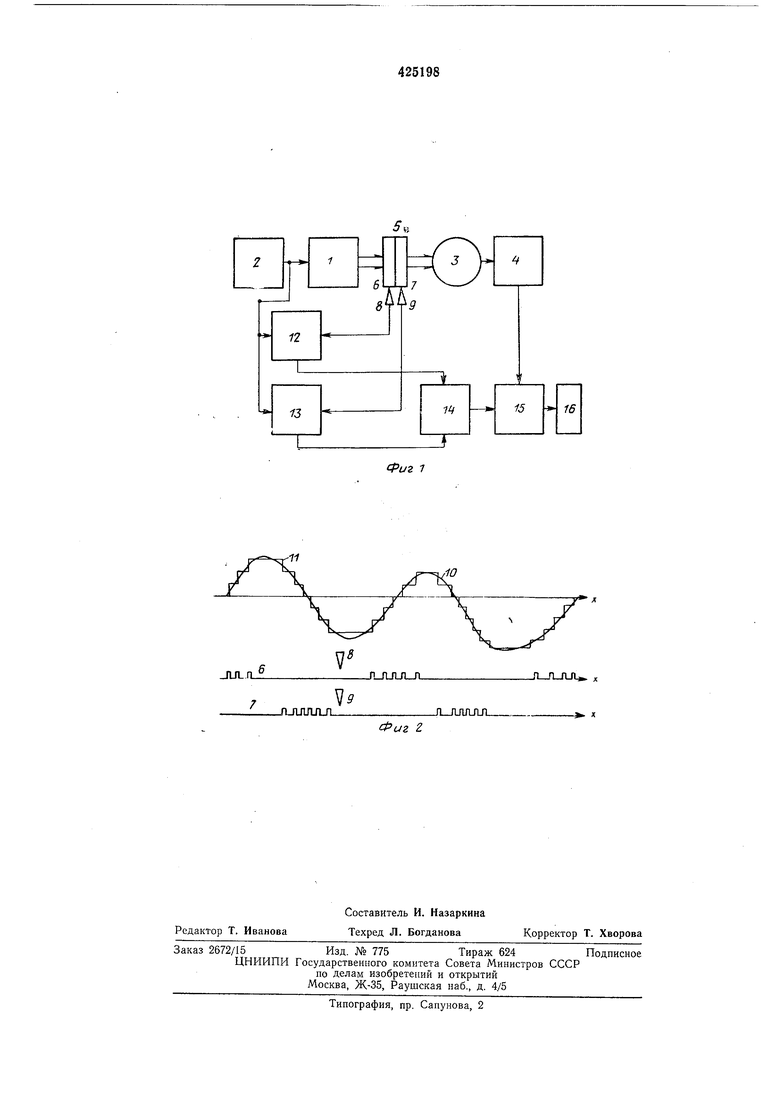
4. На вале привода жестко у-креплен задающий датчик 5, содержащий кодирующие дарожки 6 и 7, считывающие элементы 8 и 9 которых установлены по одному относительно каждой дорож ки. Рисунок каждой кодирующей дорожки соответствует ступенчатой а1п1прокси(ма|Ции непрерывной кривой ошибки liO (см. фиг. 2) привода в функции перемещения нулевой степени 11. При этом, рисунок дорожкй 6 соответствует нарастанию
кривой ошибки, а рисунок дорожки 7 - ее убыванию.
Генератор 2 таасже подключен к блокам эталонных временных интервалов 12 и 13,
iBTOpbie входы которых подк тючены соответственно к счиггьшающиМ эле|Мен:та;м 8 и 9. Выходы блоков 12 и 13 присоединены iK блоку эталонных сигналов 14, у которого- выход подключен к блоку сра1В1нен;ия сигналов 15.
Второй вход блока 15 П рисоеди1нен к блоку
4, а ВЫХОД--IK блоку восшроиэвйдеиИя результата 16.
Устройство работает .следующим образом.
В цроцессе вращени-я HcnbiTiyeMiOTO преобразователя 3 Б бло-ке сра1внения ойпналов 15 формируется временной интервал, соот ветсфвующий разностти моментов времен И появления си-гаала о реальной смене кода с выхода блока сишало1в реального кода и сигнала о расчетной смеие кода .с выхода блока эталонных оишалов 14. Результат из-м-ереиня фиксируется блоком 16.
Поскольку привод 1, прежде «сего за счет иоиижающего редуктора, имеет угло(вую отибщ (iCM. фиг. 2, юрива-я 10), что приводит ;К ОШМбке поя1влен1ия во времени сигналов реальной смены кода с выхода блока сигналов реального кода 4, иводят cooTBeTCTiByroщую вре1менную коррекцию в появление эталонных сйШалав с выхода бло1ка 14.
|Практическ:И это осущест1вляется путем прибавления дополнителыного импульса на вход счетч1И1ка, входящего в блок 14 или непропусканием очередного и,м пульса Hai его вход. Эту задачу вь п0лняют бло1к1И эталонных iBip ем енных иитерв а лов Ii2 л 13. Программа из(МенениЯ эталонных временных интервалов на выходе блока 14 реализуется с помощью задающего датчика 5, в cUHiTbiBaioщих элеме1нтах 8 и 9 которого по мере из(меиения угло:вого поло1же1ния вала испытуемого гврео1бразователя появляются сигналы коррекции, поступающие в за1код1Иро1Банной поел едо1вательнаст1и на выадде блоков 12 и 13. Каждый сигнал со считывающих элементов 8 и 9 cooTiBeTCTiByeT коррекции временного интервала па выходе блока 14 на один шаг (см. фит. 2) iB сторону уменьшения или у.велмочения. В приведенном на фиг. 2 случае сначала появляютря три сигнала на соответствующее уменьшение временного интервала, если пред1полож1ить, что ашИбка. цривода привела к более быстрому вращейию вала преобразователя в рассмотренной текущей угловой координате. Затем появляются шесть си.гнало1В на последовательное увеличение BipeMeHHoro интервала и т. д. При этом, учитьивая одинакавий вес сишалов для каждого из счить вающ1их элементов, они непосредственно подаются на блоки 12 и 13, построенные на иЗ|Бе1стных принципах.
Предмет изобретения
Устройство для испытаний прео1б|разавателей угол - код, содержащее сочлененные задающий датчик, испЫ|Туем1ый преобразователь угол - код и привод равномерной скорости, вход которого соединен с выходом генератора эталонной частоты и с первыми входами блоков эталонных .в(ремен;ных интервалов, выходы которых через блок эталонных сигналов оо-едииен-ы с первым входом блока сравнения сигналов, к второму входу которого через блок сигналов реального кода подклк чен выход испытуемого преобразователя угол-код, а выход блока сравнения сигналО|В соединен с входом блока вос;про.нзведения результата, отличающееся тем, что, с целью упрощения и повышения точности работы устройства, в нем задающий да.тмик выполнен с дюумя кодирующи:ми дорожками, с точ1ками коррекции только одного знака, очитыва1ЮЩие элементы которых соответст1веепо подключены к вторым входам блоков эталонных временных интервалов.
16
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля кодовой шкалы преобразователя угол-код | 1972 |
|
SU447743A1 |
| Преобразователь перемещения в код | 1980 |
|
SU942100A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1167733A1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ЦИФРОВЫМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ ВРАЩЕНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА | 1995 |
|
RU2116625C1 |
| Интерполяционный измеритель временных интервалов | 1977 |
|
SU711534A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ-ФАЗА-КОД | 1973 |
|
SU404111A1 |
| Преобразователь угол-код | 1973 |
|
SU474831A1 |
| Устройство для измерения погрешности преобразователя угла в код | 1976 |
|
SU652601A1 |
| Электромагнитный преобразователь угол-код | 1972 |
|
SU447738A1 |
| Устройство для измерения ошибок преобразователей угла в код | 1972 |
|
SU439841A1 |
лл.я
У
ji njuinjL
п ппппл
Фаг Z
