Изобретение относится к области испытаний изделий при воздействии механической нагрузки, вектор которой вращается относительно координатных осей изделия. Оно может быть использовано в стендах для определения стойкости и тарировки различных приборов и аннаратуры.
Для таких испытаний известно использование так называемых двойных центрифуг и вибростендов с круговыми колебаниями грузовой платформы.
Вибростенд с круговыми колебаниями содержит основание, грузовую платформу и привод для сообщения платформе круговых колебаний, включающий двигатель, приводной вал, два кривошипа с одинаковым регулируемым радиусом, пальцы которых соединены с платформой, и зубчатый синхронизатор вращения кривошипов.
Однако при испытаниях этим вибростендом трудно обеспечить устойчивое синхронное движение двух кривошипов; введение зубчатого синхронизатора приводит к наложению на основное движение платформы паразитных колебаний. Регулировка радиуса кривошипов осуществляется с помощью поворотных эксцентриковых втулок, следствием чего является нежелательное изменение фазы колебаний.
Цель изобретения - повысить точность воспроизведения заданного закона колебаний.
Это достигается тем, что привод содержит не менее трех кривошипов, каждый из которых выполнен с радиальными направляющими для пальца, один из кривощинов снабжен механизмом для радиального перемещения его пальца и непосредственно связан с приводным валом, а синхронизатор выполнен в виде
передачи с гибкими связями.
Механизм для радиального перемещения пальца кривошипа может, в частности, содержать расположенный на основании серво.мотор, установленную на кривощипе пару винт-
гайка и кинематическую цепь связи винта с сервомотором, включающую дифференциал, расположенный на основании, и соединительный вал, размещенный внутри приводного вала.
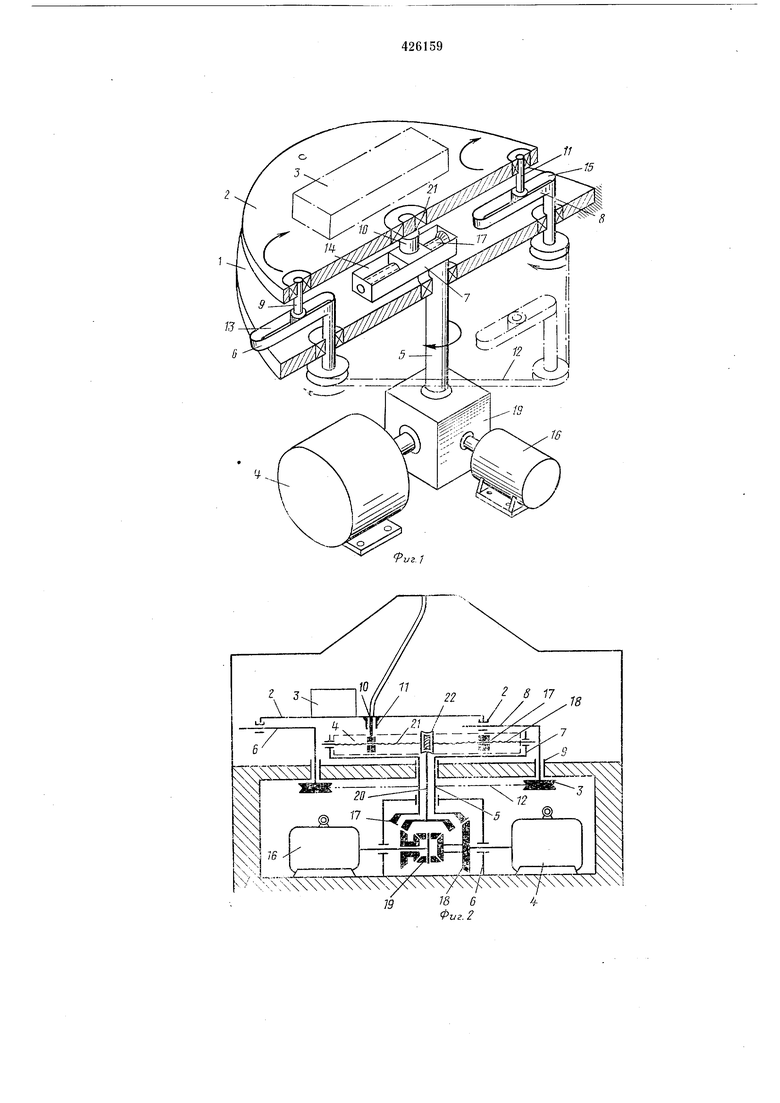
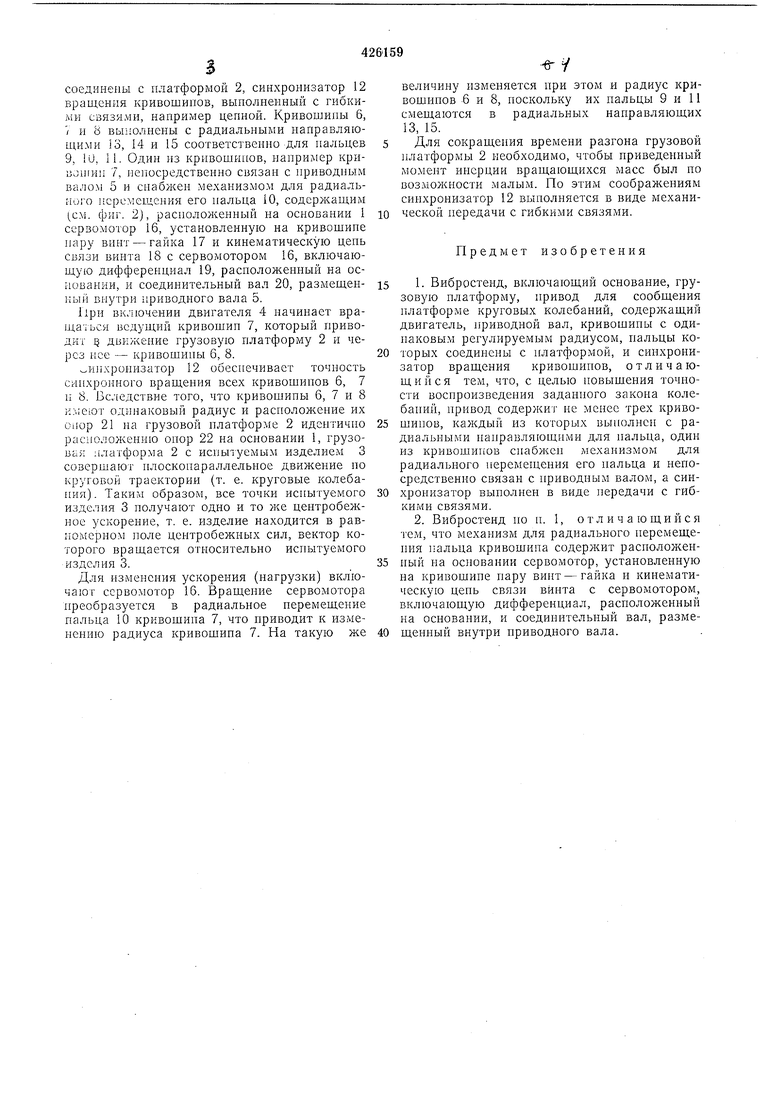
На фиг. 1 схематически изображен предлагаемый вибростенд, общий вид; на фиг. 2 - схема вибростенда с механизмом для радиального перемещения пальца кривошипа. Стенд содержит основание 1, грузовую
платформу 2, на которой устанавливается испытуемое изделие 3, привод для сообщения платформе круговых колебаний, включающий двигатель 4, нриводной вал 5, не менее трех кривошипов 6, 7 и 8 с одинаковым регулируемым радиусом, пальцы 9, 10 и 11 которых соединены с платформой 2, синхронизатор 12 вращения кривошипов, выполненный с гибкими связями, например цепной. Кривошипы 6, 7 и 8 выполнены с радиальными направляющими io, 14 и 15 соответственно для пальцев 9, 1и, 11. Один из кривошипов, например криi3jniHii 7, непосредственно связан с приводным валом 5 и снабжен механизмом для радиального перемещения его нальца 10, содержащим (СМ. фиг. 2), расположенный на основании I сервомотор 16, установленную на кривощине пару винт - гайка 17 и кинематическую цепь связи винта 18 с сервомотором 16, включающую дифференциал 19, расноложенный на основании, и соединительный вал 20, размещенпый внутри приводного вала 5. lipe включении двигателя 4 начинает врапдаться ведущий кривошип 7, который приводит движение грузовую платформу 2 и через нее - кривошипы 6, 8. и 1лронизатор 12 обеепечивает точность ci-iHxpoinioro вращения всех кривошипов 6, 7 п 8. Вследствие того, что кривошипы 6, 7 и 8 имеют одинаковый радиус и расноложение их опор 21 на грузовой платформе 2 идентично расположению опор 22 на основании 1, грузовая платформа 2 с испьпуемым изделием 3 совершают илоскопараллельное движение по круговой траектории (т. е. круговые колебания). Таким образом, все точки испытуемого изделия 3 получают одно и то же центробежное ускорение, т. е. изделие находится в равномерном ноле центробежных сил, вектор которого вращается относительно испытуемого изделия 3. Для изменения ускорения (нагрузки) включаю г сервомотор 16. Вращение сервомотора нреобразуется в радиальное перемещение пальца 10 кривощина 7, что приводит к из1менению радиуса кривошипа 7. На такую же величину изменяется при этом и радиус кривошипов 6 и 8, поскольку их нальцы 9 и 11 смещаются в радиальных направляющих 13, 15. Для сокращения времени разгона грузовой платформы 2 необходимо, чтобы приведенный момент инерции вращающихся масс был по возможности малым. По этим сообрал ениям синхронизатор 12 выполняется в виде механической передачи с гибкими связями. Предмет изобретения 1.Вибростенд, включающий основание, грузовую нлатформу, привод для сообщения платформе круговых колебаний, содержащий двигатель, приводной вал, кривошииы с одинаковым регулируемым радиусом, пальцы которых соединены с нлатформой, и синхронизатор вращения кривошипов, отличающийся тем, что, с целью повыщения точности воспроизведепия заданпого закона колебаний, нривод содержит ие менее трех кривошинов, каждый из которых выполнен с радиальными направляющими для пальца, один из кривошипов снабжен механизмом для радиального перемещения его пальца и непосредственно связан с нриводным валом, а синхронизатор выполнен в виде передачи с гибкими связями. 2.Вибростенд по п. 1, отличающийся тем, что мехаиизм для радиального перемещения пальца кривошипа содержит расположенный на основании сервомотор, установленную на кривошипе пару винт - гайка и кинематическую цепь связи винта с сервомотором, включающую дифференциал, расположенный на основании, и соединительный вал, размещенный внутри приводного вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2009 |
|
RU2431124C2 |
| ВИБРОСТЕНД | 2007 |
|
RU2349887C1 |
| ИСПЫТАТЕЛЬНЫЙ ВИВРОСТЕНД | 1969 |
|
SU251884A1 |
| Вибростенд | 1984 |
|
SU1220704A1 |
| Шестикоординатный вибростенд | 1990 |
|
SU1753322A1 |
| Двухкомпонентный низкочастотный вибростенд | 1981 |
|
SU1013795A1 |
| Стенд гармонических колебаний | 1990 |
|
SU1740829A1 |
| ДВУХКОМПОНЕНТНЫЙ ВИБРОСТЕНД | 1973 |
|
SU364854A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| М. И. Калининаи Ростовский на Дону завод «Легмаш»Л\ | 1970 |
|
SU288538A1 |