Поворотная установка предназначена для автоматической регистрации дрейфа при испытаниях интегрирующих поплавковых гироскопов и имитации сверхмалых угловых скоростей при испытаниях датчиков угловых ускорений.
Известные поворотные стенды ие позволяют с достаточно высокой точностью имитировать сверхмалые угловые скорости, поддерживать постоянство угловой скорости вращения поворотной платформы во всем диапазоне ее регулирования и обеспечить широкий диапазон бесступенчатого регулирования скорости вращения.
В предложенной поворотной установке для устранения указанных недостатков, платформа жестко связана поводковым механизмом с валом емкостного датчика повышающего электрического редуктора, фотосчитывающее устройство, которое через схему сравнения и преобразователь кода системы управления подключено к одному из электродвигателей привода вращения платформы, один из электродвигателей отрабатывающей системы емкостного датчика через преобразователь кода подключен ко второму электродвигателю привода вращения платформы, а оба электродвигателя привода вращения через редукторы связаны с суммирующим механизмом. Выходной вал суммирующего механизма через прецизионный
червяк сцеплен с червячной шестерней, жестко закрепленной па поворотной платформе, жестко связанной со съемной платформой, статически балансируемой двумя перестановочнЕзЬ ми грузами и двумя микрогрузами, сцепленными с регулировочными винтами внутри перестановочных грузов, и связанной с планшайбой, на которой установлен прибор измерения малых угловых скоростей и фотодатчик
системы разгрузки платформы. Фотодатчик содержит осветитель и три фотосопротивления, подключенные к шаговому двигателю привода, на торце которой укреплены фотосопротивления. Повышающий электрический редуктор
образован из емкостного датчика обратной связи, подключеппого через умножители частоты и фазовращатель к фазовому детектору, который подключен ко второму электродвигателю отрабатывающей системы емкостного датчика. Оба электродвигателя через редукторы и суммирующий механизм присоединены к фотоэлектрическому датчику с дорожкой дискретных участков, вал которого жестко связан с валом фазовращателя. Для повышения точности в приборе измерения малых угловых скоростей установлен датчик угла поворота, в который вмонтированы совместно с оптико-электронным устройством для считывания числа интерференционных полос прозтельная решетка, установленная совместно с зеркалами датчика на втулке, связанной с догонным устройством, причем зеркала сдвинуты одно относительно другого на величину рабочего угла, рассогласования дифракционных решеток.
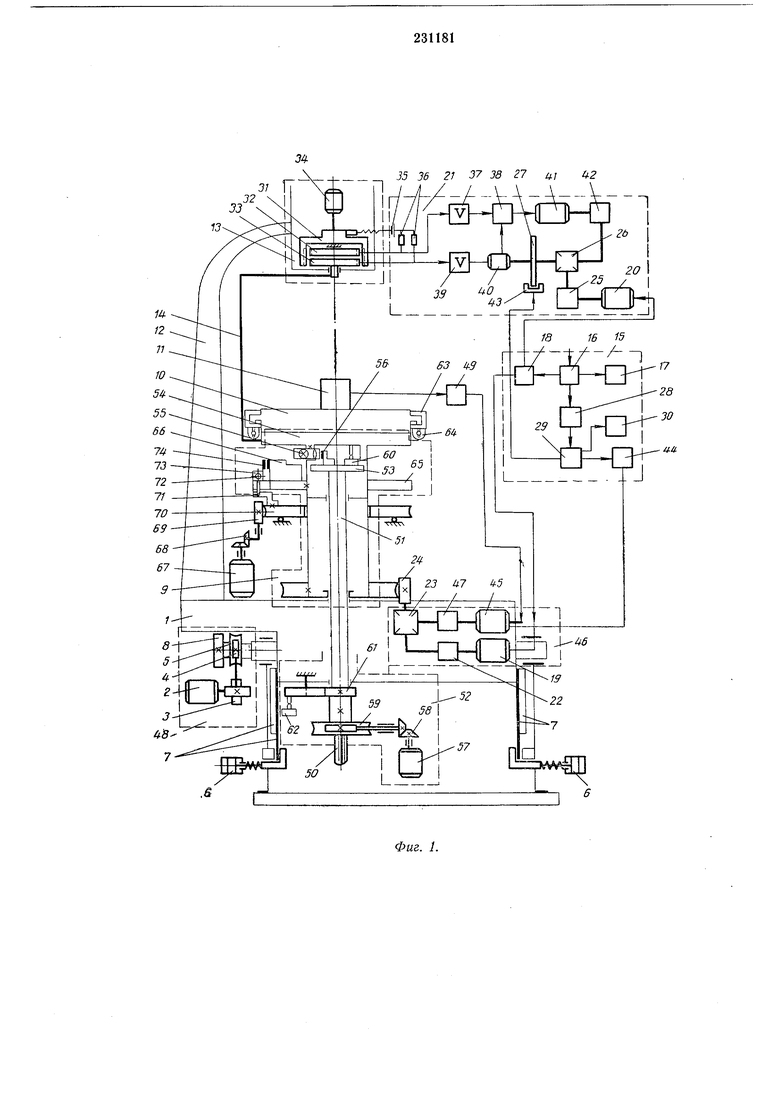
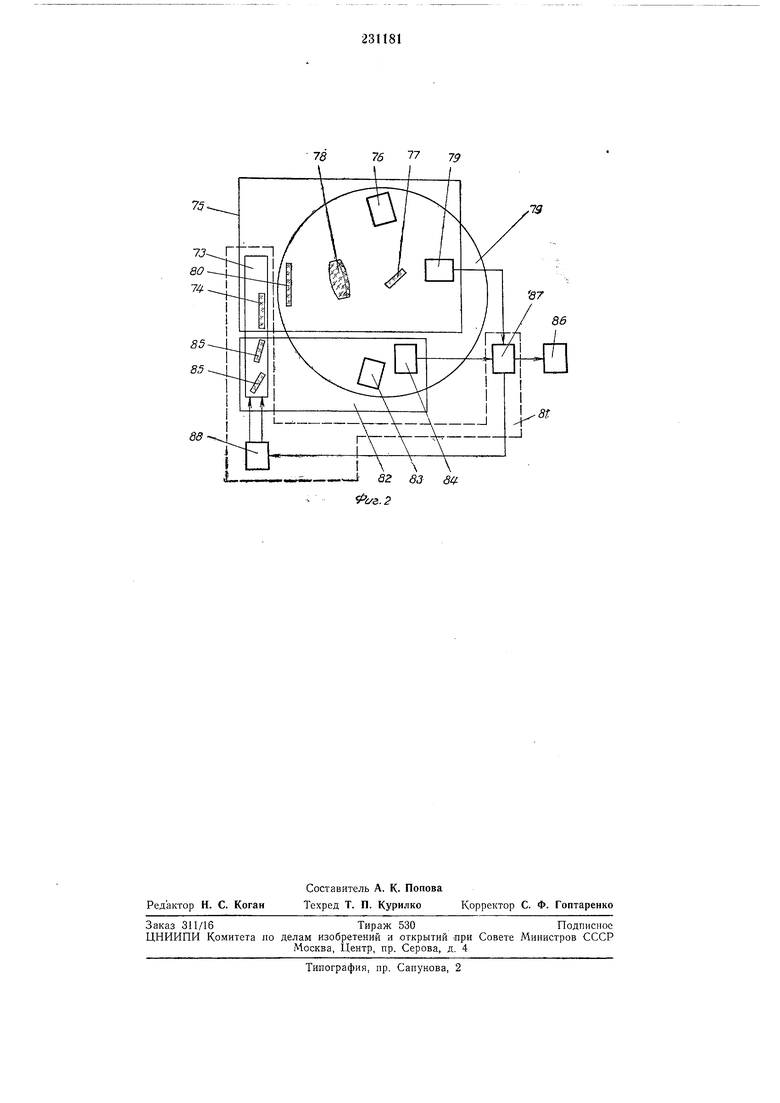
На фиг. 1 изображена кинематическая схема предложенной поворотной установки; на фиг. 2 - принципиальная схема прибора для измерения малых угловых скоростей поворотной установки.
Наклон поворотной платформы с основание.м / на угол от О до 90° к горизонту осуществляется от электродвигателя 2 через пару винтовых колес 3, червяк 4 и червячный сектор 5, который зафиксирован на цапфе основания /.
Фиксация наклона установки в любом положении диапазона от О до 90° к горизонту осуществляется двумя пружинно-гидравлическими зажимами 6 через сектора 7, зафиксированные на обеих цапфах основания /. Точный отсчет угла наклона поворотной платформы осуществляется по оптическому микрометру, отсчетный лимб 8 которого зафиксирован на одной из цапф основания 1.
Новоротная платформа 9 жестко связана со съемной балансировочной платформой 10, на которой устанавливается испытуемый прибор 11, и вращается на аэростатических подщипниках основания 1. С основанием жестко связан кронштейн 12, в верхней части которого вмонтирован дифференциальный емкостной датчик 13. Выступающий конец вала датчика связан поводковым звеном 14 с поворотной платформой 9. Ввод заданного значения скорости вращения платформы осуществляется с помощью цифровой системы 15 управления.
Для осуществления полного диапазона регулирования скорости вращения платформы 10 схема управления состоит из разомкнутой системы регулирования скорости и замкнутой системы регулирования. Если диапазон регулирования разомкнутой и замкнутой систем в отдельности составляет 50, то общий диапазон регулирования скорости составляет 50X50 2500 и может быть сделан значительно большим.
Разомкнутая система регулирования скорости вращения осуществляется следующим образом. Оператор вводит заданное значение скорости в блок 16 задания скорости в виде десятичного кода. Значение скорости выбивается на индикаторе 17. Часть общего кода заданной скорости. поступает в преобразователь 18 кода в напряжение постоянного тока, который управляет двигателем 19 привода вращения поворотной платформы 9 и двигателем 20 отрабатывающей системы 21 емкостного датчика 13. Двигатель 19 через редуктор 22 и механический дифференциал 23 приводит во вращение через прецизионную червячную передачу 24 поворотную платформу 9, а следовательно, и кестко связанную с ней платформу 10, которая через поводковое звено 14 нриводит во вращение вал емкостного датчика /. Двигатель 20 через редуктор 25, механический дифференциал 26 приводит во вращение кодовый диск 27. Замкнутая система регулирования скорости вращения обеспечивается тем, что после блока 16 задания скорости десятичный код преобразуется в двоичный
преобразователем 28 кода и цодается в систему сравнения 29, где производится сравнение этого сигнала с истинным значением скорости вращения платформы 10, полученным с повыщающего электрического редуктора.
Редуктор образуется дифференциальным емкостным датчиком 13 и отрабатывающей системой 21 емкостного датчика.
В блоке 15 цифровой системы управления предусмотрен индикатор 30 ошибок между заданной и истинной скоростями вращения.
Емкостной датчик 13 состоит из стакана 31, внутри которого находятся пеподвижный диск 32 и подвижный диск 33. С внутренней стороны стакана 31 и но наружной стороне цилиндрических поверхностей дисков 32 и 33 по образующей нанесено 540 зубцов прямоугольного профиля. Нижний подвижный диск 33 вращается со скоростью вращения поворотной платформы Я стакан 31 приводится -во вращение синхронным двигателем 34, а от батареи 35 через нагрузочные сопротивления 36 к стакану 31 и дискам 32 и 33 подводится напрял :ение. Нри аналогичном расположении в пространстве зубцов неподвижного диска 32 и подвижного диска 5 фазовый сдвиг напряжений, выделяющийся на сопротивлениях 36 за счет протекания емкостного тока, будет равен нулю. Нри повороте зубцов подвижного диска
33 относительно зубцов неподвижного диска 32 будет появляться фазовый сдвиг. Так как количество зубцов выбрано 540, то на одну угловую секунду поворота оси платформы 10 появится фазовый сдвиг порядка 10 эл. мин.
Далее направление, снятое с неподвижного диска 32, умножается по частоте на 8 усилителем 37 частоты и подается на фазовый детектор 38 в качестве опорного сигнала. Напряжение, снятое с ПОДВИЖНОГО диска 33, также умножается по частоте на 8 и усиливается усилителем 39 частоты, подается на обмотку индукционного фазовращателя 40, с выхода которого напряжение поступает на вход фазового детектора 38. Сигнал ошибки с выхода
фазового детектора 38, пропорциональный сдвигу напряжений, снятых с сопротивлений 36, подается на двигатель 41, который через редуктор 42 и механический дифференциал 26 приводит во вращение ротор индукционного
фазовращателя 40, уменьшая сигнал ошибки. С помощью фотосъемного устройства 43 с кодового диска 27 снимается информация.
С выхода системы 29 сравнения блока 15 системы управления сигнал ошибки поступает
ляет двигателем 45 привода 46 поворотной платформы 9. Двигатель 45 через редуктор 47 и механический дифференциал 23 приводит во вращение через прецизионную червячную передачу 24 поворотную платформу 9. Передаточное отношение от двигателя 45 и поворотной платформе 9 выбрано в десять раз меньше, чем от двигателя 19. Физический смысл двухдвигательной системы привода состоит в том, что замкнутая система регулирования скорости является конусной и отрабатывает ошибку разомкнутой системы.
При испытании на дрейф интегрирующих поплавковых гироскопов 11 ось новоротной платформы 9 устанавливается на соответствующий угол с помощью привода 48 вертикального наклона. Па платформе 10, жестко связанной с поворотной платф)0рмой 9, устанавливается интегрирующий поплавковый гироскоп 11, с датчика угла которого сигнал поступает на усилительное и преобразующее устройство 49. С выхода этого устройства сигпал подается на двигатель 45 конусной системы. В этом режиме блок емкостного датчика 13 и блок 15 цифровой системы управления не работают. Двигатель 45 приводит во вращение поворотную платформу 9, компенсируя составляющую суточного вращения земли.
Чтобы обеспечить постоянство омического сопротивления от испытуемого прибора до пульта цифровой системы зправления и предохрапить прибор от токов наводки, подвод сигналов к испытуемому прибору осуществляется через жгут электропроводов 50, закреплеппый внутри трубы 51, а чтобы разгрузить поворотную нлатформу 9 от переменного момента сил, создаваемого жгута электропроводов цри его закрутке, применяется привод 52 для закручивания жгута электропроводов.
Па торце трубы 51 закреплен стакан 53, через отверстия которого пропущепы провода. Второй конец проводов закреплен в специальных пазах планшайбы 54, жестко связанной с поворотной платформой 9. В планшайбе жестко закреплен осветитель 55 с конденсатором, а на стакане 53 закреплены три фотосопротивления 56. При согласованном ноложении врандающейся планщайбр, 54 относительно стакана 53 луч света засвечивает среднее из трех фотосопротивлений 56, а при рассогласовании положения луч света осветителя будет засвечивать одно из крайних фотосонротивлений, которое выдает импульс в блок управлепия шаговым двигателем 57. Шаговый двигатель 57 через конические зубчатые колеса 58 и червячную передачу 59 возвратит стакан 53 в исходное положение.
Возможные наибольщие углы рассогласования планшайбы 54 и стакана 53 ограничены упорами, действующими на микропереключатель 60, выключающий всю систему привода 52 платформы. При достижении крайних положений угла новорота платформы 10 с испытуемым прибором 11, соответствующих максимальному отрицательному углу закручивания
жгута проводов 50, от трубы 51 через цилиндрическую передачу 61, Лсестко связанную с трубой, и микропереключатель 62 подаются импульсы па блок управления шаговым двигателем 57, и система перегоняется в свое первоначальное положение, соответствующее максимальному положительному углу закручивания жгута.
Съемная балансировочная платформа 10, на
которой установлен испытуемый гироприбор 11, имеет кольцевой буртик, несущий два переставных груза 63, закрепляемых винтамн, а внзтри каждого грзза на регулировочном винте зафиксирован микрогруз 64. Паличие
этих грузов позволяет производить статическую балансировку платформы 10 с гироприбором 11 вне установкн.
С платформой 9 жестко связана платформа 65, на которой устанавливаются прибор 66 для
измерения малых угловых скоростей. Этот прибор позволяет измерять скорость дрейфа гироскопа в течение 10 сек, что соответствует углу поворота платформы 10 в 0,1 угловой секунды. При новороте платформы 9, а следовательно, и платформы 65 с прибором 66, который снабжен дифракционной решеткой, на угол 30°, включается электродвигатель 67 догонного устройства, состоящего из конической зубчатой передачи 68, червяка 69 и червячного колеса 70, насаженного свободно на поворотную платформу 9. На червячном колесе 70 жестко закреплен кронщтейн, который через струну 71 на скалке 72, закрепленной на платформе 65, перемещает втулку 73, в отогнутом
конце которой закреплена отражательная дифракционная решетка 74.
В установке для измерения малых угловых скоростей устранена зависимость контраста интерференционных полос от расстояния между решетками угловой щирнны источника света и используемого интервала длины волн путелт прилтенеиия отражательной и прозрачной дифракционных рен1еток. Эта установка позволяет с большей точностью, чем все известные приборы, производить замеры сверхмалых угловых скоростей и в минимально короткие промежутки времени. Кроме того, благодаря наличию догонного устройства, установка позволяет проводить измерения в
любой точке и на любом угле поворота поворотной платформы 9.
Установка состоит из датчика угла поворота, датчика положения и комплекса измерительной аппаратуры. Датчик 75 угла поворота содержит осветитель 76, зеркало 77, оптическую систему 78, фотоприемник 79 и прозрачную дифракциоиную рещетку 80, которые установлены на поворотной платформе 65, а отражательную дифракционную
рентетку 74, зафиксированную па втулке 73 догонного устройства 81. Датчик 82 ноложен я состоит из осветителя 83 и фотодатчика 84, зафиксированных на нлатформе 75, и зеркал 85, зафиксированных на втулке 73. Комв себя делитель частоты, измеритель интервалов времени и цифро-печатающую машину догонного устройства 81, состоящего из переключателя 87, привода 88 и втулки 73.
Предмет изобретения
1. Поворотная установка, содержащая платформу, приводы вращения, привод наклона платформы, отсчетные и регистрирующие приборы, отличающаяся тем, что, с нелью повышения качества регулирования малых угловых скоростей вращения и точности измерения, платформа жестко связана поводковым механизмом с валом емкостного датчика повышающего электрического редуктора, фотосчитывающее устройство которого через схему сравнения и преобразователь кода системы управления подключено к одному из электродвигателей привода вращения платформы, один из электродвигателей отрабатывающей системы емкостного датчика через преобразователь кода подключен ко второму электродвигателю привода вращения платформы, а оба электродвигателя привода вращения через редукторы связаны с суммирующим механизмом, выходной вал которого через прецизионный червяк сцеплен с червячной шестерней, жестко закрепленной на поворотной платформе, жестко связанной со съемной платформой, статически балансируемой двумя перестановочными грузами и двумя микрогрузами, сцепленными с регулировочными винтами внутри перестановочных грузов, и связанной с планшайбой, на которой установлен прибор измерения малых угловых скоростей и фотодатчик системы разгрузки платформы. 2. Установка по п. 1, отличающаяся тем, что фотодатчик содержит осветитель и три фотосопротивления, подключенные к шаговому двигателю привода закрутки жгута, связанному зубчатой передачей с трубой, на торце которой укреплены фотосопротивления.
3. Установка по п. 1, отличающаяся тем. что повышающий электрический редуктор образован нз емкостного датчика обратной связи, подключенного через умножители частоты и фазовращатель к фазовому детектору, который подключен ко второму электродвигателю отрабатывающей системы емкостного датчика, а оба электродвигателя через редукторы и суммирующий механизм присоединены к фотоэлектрическому датчику с дорол кой дискретных участков, вал которого жестко связан с валом фазовращателя.
4. Установка по п. 1, отличающаяся тем, что, с целью повышения точности, в приборе измерения малых угловых скоростей установлен датчик угла поворота, в который вмонтированы совместно с оптико-электронным устройством для считывания числа интерференционных полос прозрачная дифракционная решетка и отражательная решетка, установленная совместно с зеркалами датчика на втулке, связанной с догонным устройством, причем зеркала сдвинуты одно относительно другого на величину рабочего угла рассогласования дифракционных решеток.

| название | год | авторы | номер документа |
|---|---|---|---|
| вСаСОЮЗНАЯ | 1973 |
|
SU379699A1 |
| МАСШТАБНАЯ ФОТОКОПИРОВАЛЬНАЯ СИСТЕМА | 1970 |
|
SU267316A1 |
| ДОННЫЙ ГРАВИМЕТР | 1967 |
|
SU201680A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ ШВОВ | 1966 |
|
SU179979A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU339938A1 |
| ПРИБОР ДЛЯ ЗАМЕРА ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ СЛАБОДЕМПФИРУЮЩИХ ТЕЛ | 1970 |
|
SU268715A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ДУГОВОЙ СВАРКИ КРИВОЛИНЕЙНЫХ ПОВОРОТНЫХ ИЗДЕЛИЙ | 1967 |
|
SU200082A1 |
| УСТАНОВКА ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ | 1973 |
|
SU369992A1 |
| СКВАЖИННЫЙ ИНКЛИНОМЕТР | 1973 |
|
SU408009A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ ПЛАСТИЧНЫХ СВОЙСТВ БЕТОННОЙ СМЕСИ | 1970 |
|
SU267155A1 |
Фиг. 1.
88
L,
19
at
