Изобретение относится к испытательной технике и может быть использовано при виброиспытаниях различных объектов, например, изделий электронной промышленности, автомобилей, самолетов и т.д. Кроме того, изобретение может использоваться в различных технологических процессах: виброперемещениях, виброупрочнениях, виброперемещении сыпучих материалов и т.д.
Известен трехкоординатный стенд, содержащий основание, платформу для установки испытуемого изделия, и выходное звено, соединенные кинематической цепью, с которой соединены возбудители колебаний 1
Наиболее близким по технической сущности и достигаемому результату является шестикоординатный стенд, содержащий основание, платформу для установки испытуемого изделия, возбудители колебаний и шарнирные передаточные звенья для связи возбудителей колебаний с платформой 2
Недостатком данного устройства - прототипа является недостаточно высокая точностьвоспроизведения вибраций платформы, т.к. в данном случае следует согласовывать амплитуду, частоту и фазу всех вибровозбудителей. При этом необходимо слежение в реальном масштабе времени за перечисленными параметрами Это
ы ю ю
требует сложной вычислительной техники и понижает точность и надежность.
Целью Данного технического решения является повышение точности воспроизведения вибраций платформы.
Поставленная цель достигается тем, что в шестикоординатном стенде, содержащем основание, платформу Туя установки испытуемого изделия, возбудители колебаний и шарнирные передаточные звенья для связи возбудителей колебаний с платформой, новым является то, что он включает шесть возбудителей колебаний, выполненных в виде кривошипно-шатунных механизмов с регулируемым радиусом кривошипа, связанных с одним приводным двигателем, а связь каждого возбудителя колебаний с платформой осуществлена посредством двух передаточных звеньев, первое из которых соединено одностепенными шарнирами с основанием и шатуном кривошипно-шатун- ного механизма, а второе связано посредством пространственных шарниров с первым звеном и платформой, при этом все вторые передаточные звенья либо их продолжения не пересекают одну прямую и никакие четыре из них не лежат в одной плоскости, не пересекаются и не параллельны.
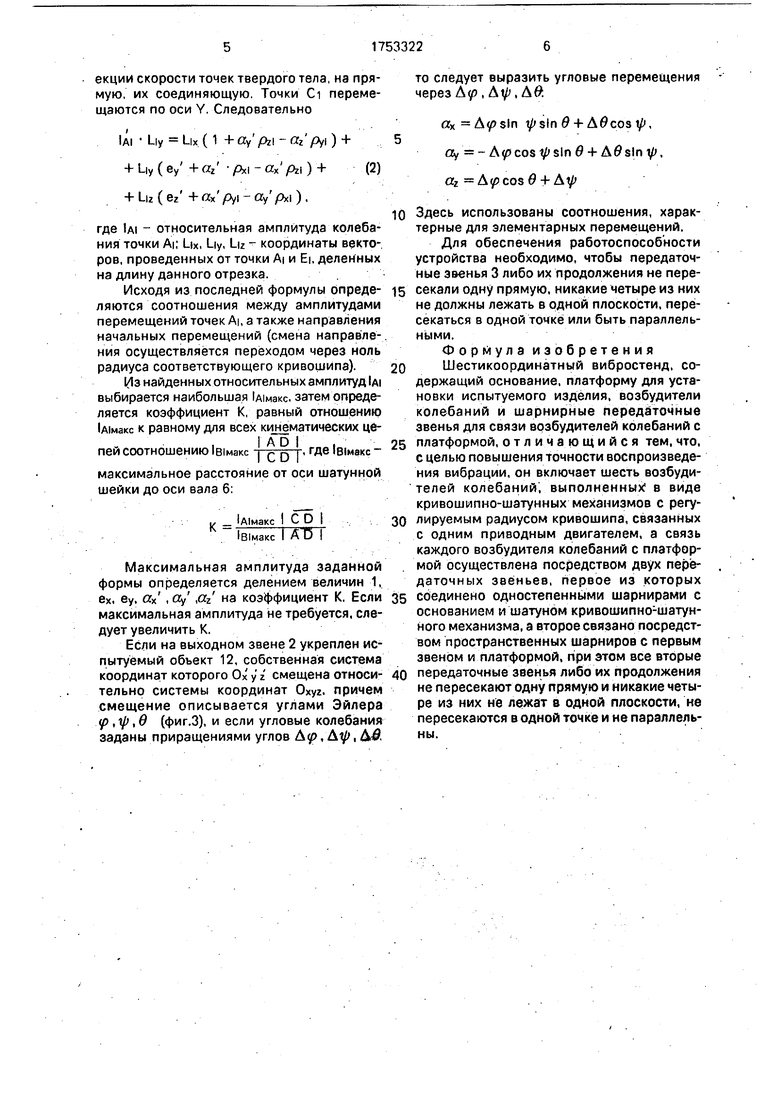
На фиг.1 изображена схема предлагаемого устройства, на фиг.2 - схема одной кинематической цепи, включающей возбудитель колебаний и шарнирные передаточные звенья; на фиг 3 - платформа, система координат и испытуемое изделие
Шестикоординатный вибростенд содержит основание 1, платформу 2, шарнирные передаточные звенья 3, 4, двигатель 5, кривошипные валы 6, шатуны 7, кривошипы 8 с регулируемым радиусом 8, пространственные шарниры 9, одностепен+ные шарниры 10, промежуточное звено 11. Шестикоординатный стенд (фиг. 1) состоит из основания 1 и платформы 2, шести возбудителей колебаний, выполненных в виде кривошипно-шатунных механизмов, имеющих кривошип 8 с регулируемым радиусом и шатун 7. Все возбудители колебаний связаны с одним приводным двигателем 5. Связь каждого возбудителя колебаний с платформой осуществлена посредством двух передаточных звеньев 3 и 4, первое из которых (4) соединено одностепенными шарнирами 10 с основанием и шатуном кривошипно-ша- тунного механизма, а второе звено 3 связано посредством пространственных шарниров 9 с первым звеном 4 и с платформой 2.
Двигатель 5 может быть связан с возбудителем колебаний посредством механизма параллельных кривошипов, включающего промежуточное звено 11, вращательные пары 12 и кривошипный вал 6.
Устройство работает следующим образом
Перед включением определяются требуемые радиусы кривошипов 8, которые оп- ределяют амплитуду, форму и фазу колебаний.
Амплитуда колебаний меняется в зависимости от изменения радиусов кривошипов 8 (без изменения пропорции между радиусами кривошипов).
Частота колебаний определяется частотой вращения двигателя 5.
Вращение двигателя 5 через звено 11 передается кривошипному валу 6, далее через кривошипы 8 и одностепенные шарниры 10 передается колебательное движение передаточным звеньям 4, которые через
пространственные шарниры 9 и передаточные звенья 3 передают колебания платформе 2 и испытуемому изделию.
При определении требуемых значений радиусов кривошипов 8 для каждой кинематической цепи можно использовать соотношения для скоростей или бесконечно малых перемещений, т.к. колебания малые. При этом ам плитуда колебаний точки AI равна IAI
В1 | г-п | 0) гДе Bl РаДиУс кривошипа; IADI и ICDI - отрезки, изображенные на фиг.2|АО| и|СО| равны для всех кинематических цепей. Форам колебаний задается соотношением изменений линейных и угловых координат Задаются перемещения по координатам xyz (фиг.1) lx,ly,z, а также приращения угловых координат «х, Щ , аг и определяются отношения этих величин к одной из них, например, к ex. Отсюда получаются значения 1, еу,ег, a ,cty ,dz Я ( Имеются в виду синусоидальные колебания. Под формой понимается соотношение между).
Далее находятся перемещения центров сферических пар, примыкающих к выходному звену EIЕе (фиг.1).
Si 1(1 +ay pzi-az pyl)-f +Т(еу -f-az / xi-ax /9zi) + + k(ez +ax / yi-ay pxi)
где Si - перемещение точки EI (i 1...6), P f yipzr координаты точки EI.
Затем следует найти соотношения амплитуд колебаний точек А, а также направления начального перемещения. Амплитуда определяется на основании теоремы о про
екции скорости точек твердого тела, на прямую, их соединяющую. Точки Ci перемещаются по оси Y. Следовательно
|Д| Lly Llx ( 1 + СГу рг - Пг /ty ) +
4-Liy (ey; + «z A i-«x yOzi) +(2)
+ Liz (ег + «x (i - QV px).
где IAI - относительная амплитуда колебания точки Ai; Lix, Liy, Liz - координаты векторов, проведенных от точки AI и EI, деленных на длину данного отрезка.
Исходя из последней формулы определяются соотношения между амплитудами перемещений точек AI, а также направления начальных перемещений (смена направления осуществляется переходом через ноль радиуса соответствующего кривошипа).
Из найденных относительных амплитуд IAI выбирается наибольшая 1д1макс, затем определяется коэффициент К, равный отношению 1д1макс к равному для всех кинематических цепей соотношениюIBIMSKC | с р где В1макс
максимальное расстояние от оси шатунной шейки до оси вала 6:
К
1А1макс I CD i В1макс I AT5 I
Максимальная амплитуда заданной формы определяется делением величин 1, вх, еу, огх i С(у ,az на коэффициент К. Если максимальная амплитуда не требуется, следует увеличить К.
Если на выходном звене 2 укреплен испытуемый объект 12, собственная система координат которого Ох у z смещена относительно системы координат Oxyz. причем смещение описывается углами Эйлера р,гр,0 (фиг.З), и если угловые колебания заданы приращениями углов , АV &0
0
5
0
0
5
0
то следует выразить угловые перемещения через Д, А.ЛЙ
в + A0COS t, а/ +A0sln V- az +Ay
Здесь использованы соотношения, характерные для элементарных перемещений.
Для обеспечения работоспособности устройства необходимо, чтобы передаточные звенья 3 либо их продолжения не пересекали одну прямую, никакие четыре из них не должны лежать в одной плоскости, пересекаться в одной точке или быть параллельными.
Формула изобретения Шестикоординатный вибростенд, содержащий основание, платформу для установки испытуемого изделия, возбудители колебаний и шарнирные передаточные звенья для связи возбудителей колебаний с платформой, отличающийся тем, что, с целью повышения точности воспроизведения вибрации, он включает шесть возбудителей колебаний, выполненных1 в виде кривошипно-шатунных механизмов с регулируемым радиусом кривошипа, связанных с одним приводным двигателем, а связь каждого возбудителя колебаний с платформой осуществлена посредством двух передаточных звеньев, первое из которых соединено одностепенными шарнирами с основанием и шатуном кривошипно-шатун- ного механизма, а второе связано посредством пространственных шарниров с первым звеном и платформой, при этом все вторые передаточные звенья либо их продолжения не пересекают одну прямую и никакие четыре из них не лежат в одной плоскости, ке пересекаются в одной точке и не параллельны.
фиН

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний изделий на тряску | 1985 |
|
SU1352277A1 |
| ВИБРОСТЕНД | 1967 |
|
SU223413A1 |
| ГИДРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2009 |
|
RU2431124C2 |
| Вибростенд | 1980 |
|
SU1136050A1 |
| Двухкомпонентный низкочастотный вибростенд | 1981 |
|
SU1013795A1 |
| ВИБРОСТЕНД | 2007 |
|
RU2349887C1 |
| Гидравлический вибростенд | 1989 |
|
SU1698662A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1379533A1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2334143C1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
Изобретение относится к испытательной технике. Цель изобретения - повышение точности воспроизведения вибраций. Шестикоординатный вибростенд содержит основание 1, платформу 2, шесть возбудителей колебаний, выполненных в виде криво-шипно-шатунных механизмов 8 с регулируемым радиусом кривошипа и связанных с одним приводным двигателем 5 Свясь .пж- дого возбудителя колебаний с платформой осуществлена двумя передаточными звеньями 4 и 3. Звено 4 соединено одностепенны- ми шарнирами 10 с основанием и шатуном 7 кривошипно-шатунного механизма, а звено 3 связано посредством пространственных шарниров 9 с первым звеном и платформой. Благодаря использованию одного приводного двигателя не требуется специально согласовывать частоту и фазу всех возбудителей колебаний. Для обеспечения работоспособности устройства необходимо, чтобы передаточные звенья 3, либо их продолжения не пересекали одну прямую, никакие четыре из них (либо их продолжения) не лежали в одной плоскости, не пересекались в одной точке и не были параллельными 3 ил.
| Трехкоординатный механический вибростенд | 1974 |
|
SU488625A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
