Изобретение относится к области автоматизации технологических процессов в различных отраслях промышленности и предназначено для .непрерывно-позиционного регулирования технологических параметров и процессов (уровня, температуры, давления, расхода и др.) и, в частности, для автоматического удаления жидкости из аппаратов на газодобывающих предприятиях.
Пневматический позиционный регулятор, содержащий первое и второе трехмембранные реле, вход питания последнего из которых подключен к задатчику давления, управляюи1,ая камера - к датчику минимальной величины, а выход - к одному из входов первого трехмембра ного реле, соединенного своим выходом с управляющим входом исполнительного механизма, и датчик максимального сигнала, известен.
Однако указанный регулятор осуществляет двухпозиционное регулирование параметра около заданных значений величин минимума и максимума, а возврата параметра в третье, первоначально установленное значение (например, среднее) не обеспечивает.
Предлагаемый регулятор отличается от известных тем, что отрицательная управляющая камера первого реле подключена к датчику максимальной величины, а управляющие камеры каждого из реле подключены к каналу питания через соответствующий дроссель. Такое выполнение регулятора упрощает конструкцию и улучшает его динамические характеристики.
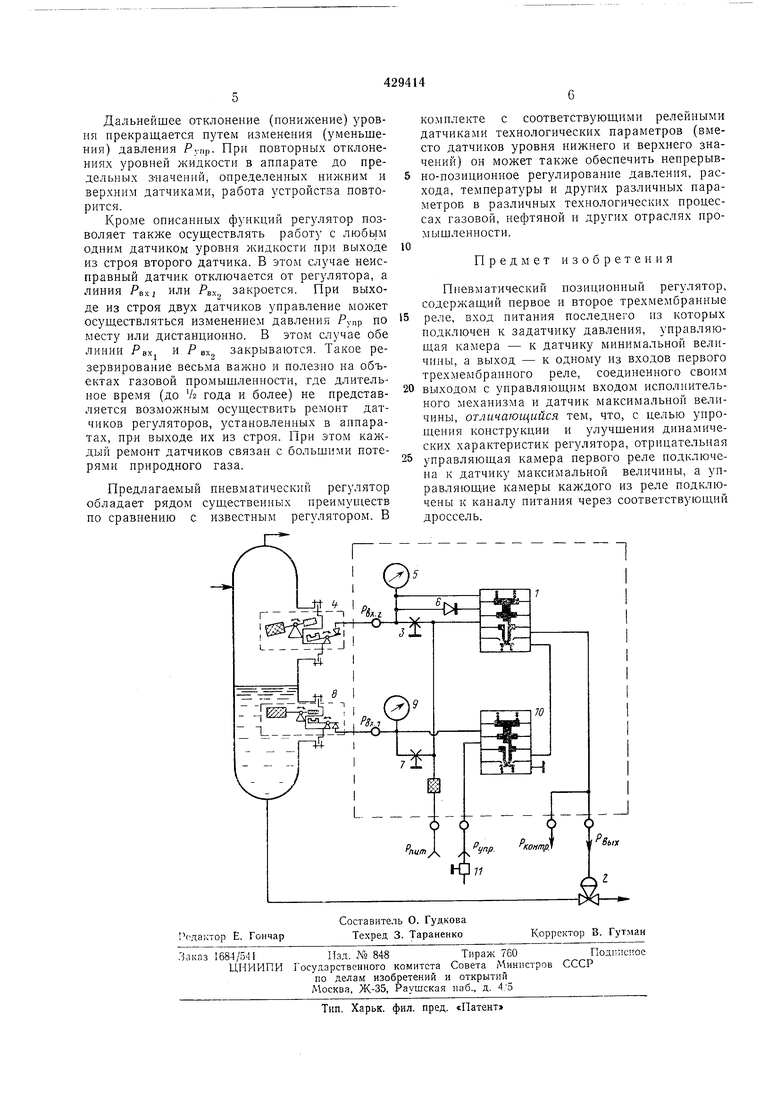
На чертеже представлена схема регулятора.
Регулятор содержит трехмембраиное реле /, выход которого соединен с управляющим входом исполнительного механизма 2 и
каналом дистанционного контроля Я,. а вход реле подключен к каналу Я ех,-Канал питания через дроссель 3 подключен к размыкающему контакту датчика 4 максимальной величины, манометру 5, отрицательной управляющей камере реле / и через обратный клапан 6 - к управляющей камере реле.
На линии питания установлен дросель 7, через который давление питания подается к замыкающему контакту датчика минимальной величины 8, манометру 9 и управляющей камере второго пневматического трехмембранного реле 10, вход которого подключен к задатчику 11, а выход через первое
реле / - к исполнительному механизму 2.
Работает регулятор следующим образом. Питающий и управляющий агент (сжатый воздух или природный газ) нз линии РПНТ поступает в нормально-закрытую камеру первого трехмембранного реле 1, подающего управляющие импульсы на исполнительный механизм 2. Одновременно питающий агент постзпает через дроссель . в линию Явх соединенную с размыкающим контактом датчика 4, манометром 5, отрицательной камерой реле / -и через обратный клапан 6 в управляющую камеру этого реле, а также через дроссель 7 в линию Дх. соединенную с замыкающим контактом датчика 8, манометром 9 и управляющей камерой реле W, направляющего или прекращающего командные и: шульсы Яупр от задатчика 11 через замыкающий пневмоконтакт реле 1 (возмол но через элемент ИЛИ) на исполнительный механизм 2. Сигналы о работоспособности и отклонениях от нормального состояния системы регулирования и предельных значениях уровня в аппарате поступают в линию дистанционного контроля Рконгр из линии Р„ь,, СОединенной с исполнительным механизмом 2. При отсутствии жидкости в аппарате и в случае расположения уровня жидкости ниже датчика 8, контакт этого датчика открыт, давление в линии Явх, и в управляющей камере реле W равно 0. Реле 10 находится в исходном состоянии, а поэтому давление на выходе этого реле равно О, т. е. сигнал Рупр не проходит. В этом случае контакт верхнего датчика 4 зфовня закрыт, давление в камерах запрета и управляющей камере реле / равно, вследствие чего реле также находится в исходном пололсении. Линия Явых сообщена с атмосферой через замыкающие контакты реле / и 10, давление на приводе исполнительного органа (клапана) 2 равно О, т. е. он закрыт. При повыщении уровня жидкости в аппарате до значения, контролируе.мого датчиком 8, его замыкающий контакт закроется, в результате чего давление в линии Ра начнет повыщаться. По истечении времени, заданного дросселем 7, давление в линии повысится до значения, при котором сработает реле 10 (мембранный блок переместится вверх), заданный (.необходимый) командный импульс Рупр от задатчика (в интервале 0,2-1 кгс/см) поступит через открывшийся контакт реле 10 и замыкающий контакт реле / в линии РВЫХ , Р контр и на привод клапана 2. В соответствии с временем задержки, установленным дросселем 7, уровень жидкости в аппарате примет значение равное или близкое к среднему нижним (8) и верхним (4) датчиками уровня. В линии Рвых установится давление, равное Рупр, исполнительный механизм 2 установит клапан на технологической линии в положение, обеспечивающее непрерывное удаление из аппарата по сливной линии всей поступающей в него жидкости и поддержание уровня жидкости в аппарате на установленном значении. В линии Рконтр также установится давление Рупр, характеризующее нормальное состояние объекта и регулятора. При значительном увеличении количества поступающей жидкости в аппарат или в случае засорения занорно-регулируемого клапана, что периодически иметь место, уровень жидкости будет повыщаться до значения, контролируемого верхним датчиком 4. В этом
случае контакт этого датчика откроется и сообщит линию РВХ с атмосферой. В результате этого давление в отрицательной управляющей камере трехмембраиного реле / снизится до 0. Под действием давления, оставщегося с помощью обратного клапана 6 в управляющей камере реле, мембранная сборка реле переместится вверх, разобщит линию Рупр от линии РВЫХ и Рконтр И одновременно сообщит линию Рпиг с ЛИВИИ РВЫХ.
в линии Рконтр также установится давление, равное РПИТ, характеризующее ненормальное повыщение уровня жидкости в аппарате или самопроизвольное открытие контакта верхнего датчика.
Под действием поданного давления РПИТ клапан 2 откроется больще (в завнсимости от величины РПИТ, которая может регулироваться в пределах 0,8-1,4 кгс/см) и обеспечит удаление большего количества жидкости. В
реззльтате этого уровень жидкости в аппарате понизится, контакт датчика 4 вновь закроется,
По истечении времени, заданного дросселем 3, давление в линии РВХ., повысится до
значения, при котором реле / сработает и придет в исходное положение, т. е. линия Рупр сообщится с линиями Рйых и Рконтр. Оставщееся в этих линиях давление Рпнт понизится до значения А-пр через задатчик // (редуктор давления). Таким образом установится равный или близкий к первоиачальному уровень жидкости в аппарате и режим работы регулятора.
Дальнейщее отклонение (повышение) уровня прекращается путем изменения (увеличения) давления Рупр. При значительном уменьщении количества поступающей жидкости в аппарат или увеличении (разрушении) сечения клапапа или ограничивающих дросселей
в сливной линии, уровень жидкости будет нонилсаться до значения, контролируемого датчиком 8.
В этом случае контакт этого датчика откроется и сообщит Р„х1 с атмосферой. При этом сработает и придет в исходное положение реле 10, а линия Рупр разобщится с линиями Р и Ркоптр. Давление с клапана 2 через замыкающие контакты реле 1 н 10 сброснтся в атмосферу, он закроется и предотвратит дальнейшее понижение уровня жидкости.
В линии Рконгр установится давление, равное О, характеризующее ненормальное понижение уровня или самопроизвольное открытие контакта нижнего датчика.
По истечении времени, заданного дросселем 7, установится равный, или близкий к первоначальному, уровень жидкости в аппарате и режим работы регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР УРОВНЯ | 1972 |
|
SU358684A1 |
| ПНЕВМАТИЧЕСКОЕ РЕЛЕ ВРЕМЕНИ | 1972 |
|
SU434199A1 |
| Регулирующий клапан | 1976 |
|
SU615307A1 |
| Пневматическое устройство управления расходом | 1981 |
|
SU1015345A2 |
| Хроматограф А.С.Айрапетяна | 1987 |
|
SU1658083A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU679939A1 |
| Устройство для создания пневмоперитониума | 1988 |
|
SU1664329A2 |
| Регулятор давления газа для двигателя внутреннего сгорания с турбонаддувом | 1990 |
|
SU1760144A1 |
| УСТРОЙСТВО ДЛЯ НАГНЕТАНИЯ КРОВИ | 1970 |
|
SU419222A1 |
| Система регулирования температуры теплоносителя двигателя внутреннего сгорания | 1991 |
|
SU1813893A1 |
