0атЛ.
fO $
&УЛУС/П./
«
И
дистанционным переключателем 10, устройством 11 дистанционного управления с двумя входами и двумя выходами, выполненным в виде двух электропневматических клапанов 12 и 13, регулируемого пневмо- сопротивления 15, пневмореле 15 и пневмо- емкости 16. Задатчик давления 5 подключен к пневмолинии питания системы через нерегулируемое пневмосопротивление 17. Электрически электропневматический клапан 12 подключен к переключателю 9 режимов работ, а электропневматический клапан
13 - к дистанционному переключателю 10. Клапаны 12 и 13 конструктивно идентичны друг другу и представляют в данном варианте исполнения устройства дистанционного управления электропневматические преобразователи. Сопло Ci клапана 12 соединено с атмосферой и при отсутствии электрического сигнала от переключателя 9 представляет собой нормально открытый контакт, а сопло Cz клапана 12, связанное с давлением питания системы, - нормально закрытый контакт. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного и автоматического управления охлаждением силовой установки | 1990 |
|
SU1778330A1 |
| Устройство для управления частотно- иМпульСНыМ дОзАТОРОМ | 1979 |
|
SU817480A1 |
| Устройство для управления доильным аппаратом | 1989 |
|
SU1811779A1 |
| ЗАДАТЧИК ДАВЛЕНИЯ КОНДИЦИОНЕРА МЕДИЦИНСКОЙ КИСЛОРОДНОЙ БАРОКАМЕРЫ | 1970 |
|
SU288435A1 |
| Аппарат искусственной вентиляции легких | 1974 |
|
SU536825A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1972 |
|
SU429414A1 |
| Устройство для управления доильным аппаратом | 1981 |
|
SU1186166A1 |
| Устройство для измерения вязкости жидкостей | 1984 |
|
SU1157404A2 |
| Перфузионная насосная установка | 1984 |
|
SU1223915A1 |
| Устройство для дозирования жидкостей | 1981 |
|
SU994921A1 |
Сущность изобретения: система содержит датчик-реле 1 температуры, контактор- ное устройство 2, связанное с мотором-вентилятором 3, и регулятор 4 температуры теплоносителя обратного действия, подключенный первым входом к задатчику 5 давления через пневмолинию, вторым - к устройству 6 замера температуры теплоносителя, а выходом посредством позиционера 7 - к приводу 8 мотора-вентилятора 3. Кроме того, система снабжена пе- реключателем 9 режимов работ,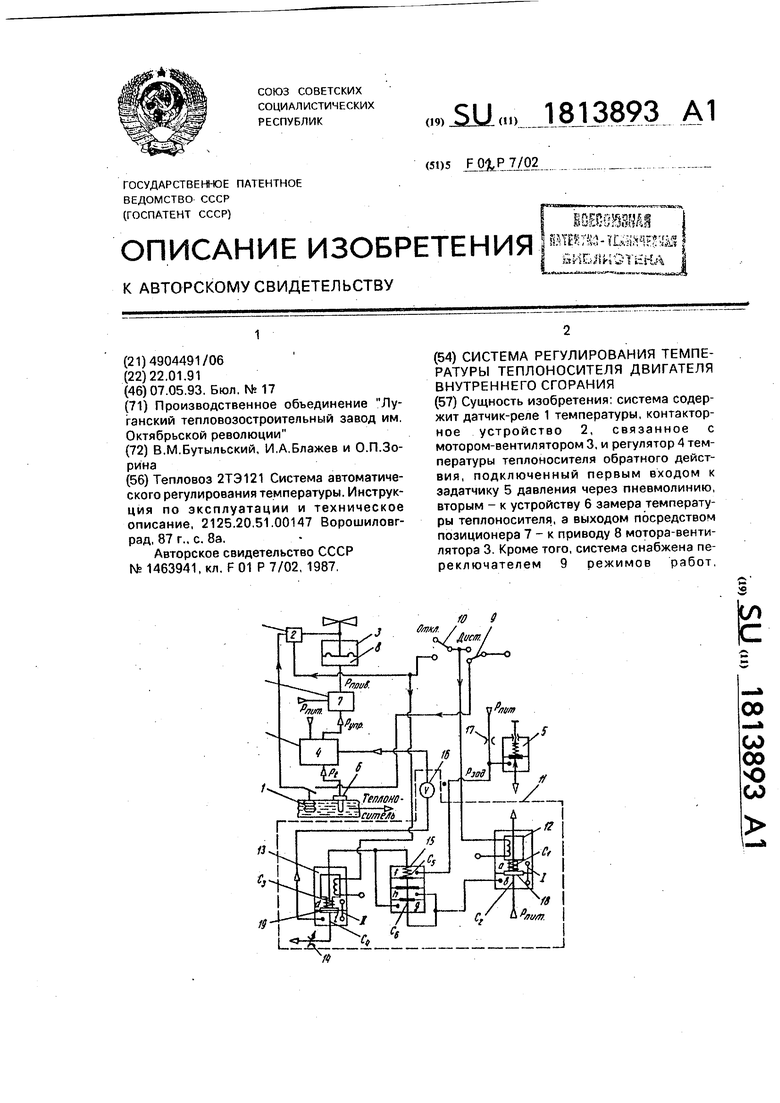
Изобретение относится к области автоматизации двигательных установок, в частности к системам автоматического регулирования производительности мотор- вентилятора и может быть использована в системах регулирования температуры теплоносителей тепловых машин, например, дизеля тепловоза.
Цель изобретения - снижение затрат электроэнергии и повышение долговечности.
Благодаря такому пневматическому и электрическому подключению устройства дистанционного управления, а именно, первого электропневматического клапана к переключателю режимов работ, а второго к дистанционному переключателю, в автоматическом режиме работы системы на обмотки катушек этих клапанов электрический сигнал не поступает. Это позволяет держать закрытым сопло электропневматического клапана, связанное с давлением питания системы, и тем самым запирать его, не пропуская дальше на вход к регулятору температуры обратного действия и з мембранную полость привода мотор-вентилятора, и наоборот беспрепятственно пропускать давления Рзад. от задатчика давления через открытые сопла пневмореле и второго электропневматического клапана, через пнев- моемкость - на вход регулятора обратного действия, в котором производится сравнение давления Рзад. и выходного давления от датчика температуры охлаждающей жидкости. В результате чего вырабатывается на выходе его обычный выходной сигнал Рупр. поступающий на вход позиционера и далее в мембранную полость привода мотор-вентилятора.
Запирание Рпит. пневмосистемы и поступление давления Рприв. в мембранную полость привода мотор-вентилятора позволяет осуществлять в автоматическом режиме работы системы обычный процесс управления производительностью мотор-вентилятора.
При переходе системы на дистанционный режим происходит переключение пнев- моконтактов клапанов, связанное с поступлением электрического сигнала на их катушки, что приводит к тому, что ранее
запертый сигнал Рпит. системы поступает через открытое сопло первого электропневматического клапана, пневмореле, второй электропневматический клапан, емкость, регулирующее устройство, позиционер в
мембранную полость привода мотор-вентилятора, а давление Рзад. наоборот запирается, и далее в пневмосистему не пропускается. В результате чего в мембранной полости привода мотор-вентилятора создается давление уровень которого обеспечивает минимальный угол разворота лопастей,
При включении дистанционного переключателя начинается вращение мотор-вентилятора с минимальным углом разворота лопастей и таким образом достигается его пневматическая разгрузка, но одновременно с этим происходит переключение пневмокон- тэктов другого электропневматического клапана, связанного электрически с дистанционным переключателем работ, при этом пневмолиния, связывающая мембранную полость привода мотор-вентилятора, позиционер, регулятор обратного действия
и пневмоемкость - сообщается через регулируемое пневмосопротивление с атмосферой. Это приводит к тому, что давление в мембранной полости привода снижается, а угол разворота лопастей - увеличивается до
максимального за время, зависящее от времени истечения воздуха через регулируемое пневмосопротивление.
Система может быть применена как для одноконтурных систем регулирования, так и для многоконтурных систем, так как число контуров на сущность изобретения влияния не имеет, в дальнейшем описании будет рассматриваться один контур.
Сущность изобретения поясняется чертежом.
На фигуре представлена функциональная схема системы регулирования температуры теплоносителя двигателя внутреннего сгорания.
Система содержит датчик-реле температуры 1, контакторное устройство 2, связанное с мотор-вентилятором 3, регулятор температуры теплоносителя обратного действия 4, подключенный первым входом к задатчику давления 5 через пневмолинию, вторым - к устройству замера температуры 6 теплоносителя, а выходом - посредством позиционера 7 к приводу 8 мотор-вентилятора 3, переключатель режимов работ 9, дистанционный переключатель 10. Кроме того, система содержит устройство дистанционного управления 11 с двумя входами и двумя выходами, выполненным в виде двух злектропневматических клапанов 12 и 13, регулируемого пневмосопротивления 14, пневмореле 15 и пневмоемкости 16, причем первый вход устройства дистанционного управления подключен через электропнев- моклапан 12 к пневмолинии, второй вход - к задатчику давления 5 посредством пневмореле 15, первый выход соединен с приводом 8 мотор-вентилятора 3 через пневмоемкость -16, второй выход соединен с атмосферой посредством регулируемого пневмосопротивления 14, электропневмок- лапан 12 связан с переключателем режимов работ 9, а электропневмоклапан 13 - с дистанционным переключателем 10.
Задатчик давления 5 подключен к пневмолинии питания системы через нерегулируемое пневмосопротивление 17.. Электропневмоклапаны 12 и 13 конструктив- нсГйдентичны друг другу и представляют в данном варианте исполнения устройства дистанционного управления электропневматического преобразователя. Каждый из них содержит: две разделенные между собой полости а и b, d и е (соединенные каналами I и II), якорь электромагнита с двухсторонней заслонкой 18 и 19, закрепленной на плоской резинотканевой мембране, свободно перемещающейся между соплами С1-С2 и Сз-Сз при подаче электрического сигнала на электрические катушки каждого из этих клапанов, при этом открывая и закрывая одно из сопел.
Сопло Ci клапана 12 соединено с атмосферой, и, при отсутствии электрического сигнала от переключателя режимов работ 9 представляет собой нормально открытый 5 контакт, а сопло Са этого же клапана, связанное с давлением питания системы - нормально закрытый контакт.
Аналогично и в клапане 13, при отсутствии электрического сигнала, в данном слу- 0 чае от дистанционного переключателя 10, сопло Сз, связанное выходным давлением через емкость 16, регулятор температуры теплоносителя обратного действия 4 и позиционер 7 с приводом 8 мотор-вентилятора 3,
5 представляет собой нормально открытый контакт, а сопло GJ, связанное с атмосферой через регулируемое пневмосопротивление 14 - нормально закрытый контакт. Связь между злектропневматическими клапанами
0. в данном варианте исполнения устройства дистанционного управления осуществляется через пневмореле 15, предназначенное для реализации различных логических функций. .
5 Реле состоит из четырех камер, разделенных между собой плоскими резинотка- невыми мембранами, объединенными в мембранный блок, и двух сопел Cs и Сб. Жесткие центры крайних мембран служат
0 заслонками и вместе с соплами образуют два пневмоконтакта сопло-заслонка. В одной из сопловых камер (в камере f) установлена пружина, фиксирующая в определенном положении всю мембранную
5 сборку. Для включения пневмореле в систему к каждому его штуцеру подводится пневматический сигнал. В данном случае к соплу. . Се подводится выходной сигнал от электропневматического клапана 12, а к соплу Cs,
0 связанным своим выходом с соплом Сз электропневматического клапана 13 подводится выходной сигнал от задатчика давления 5 - Рзад. При отсутствии входных сигналов мембранная сборка находится в положении, по5 зволяющем держать открытым сопло Cs, при поступлении входного сигнала от электропневматического клапана 12, мембран-- ная сборка пневмореле перебрасывается в другое положение, преодолевая усилие пру0 жины и открывая ранее закрытое сопло Се и, наоборот, закрывая сопло СБ..
Предлагаемая система работает следующим образом.. При изменении температуры теплоно5 сителя изменяется выходной пневматический сигнал Pi от устройства замера температуры теплоносителя 6, который поступает на один из выходов регулятора температуры теплоносителя обратного действия 4, второй вход которого подключен к выходу задатчика давления 5, где оба эти давления сравниваются и преобразуются в управляющий сигнал РуПр. Управляющий сигнал Рупр. поступает к позиционеру 7, который в свою очередь вырабатывает сигнал Рприв., непосредственно воздействующий на мембрану привода 8 мотор-вентилятора 3, где он преобразуется в перемещение его мембраны, положением которой определяется величина угла разворота лопастей мотор-вентилятора,а следовательно, и режим охлаждения, причем данный механизм работает таким образом, что, чем больше давление в мембранной полости, тем меньше угол разворота лопастей и наоборот,
В автоматическом режиме работы системы переключатель режимов работ 9 находится в положении Авт., при котором электрический сигнал не поступает на катушку электропнёвматичеокого клапана 12. При этом под действием пружины сопло Си - закрыто, а сопло Ci - открыто. Входной сигнал, связанный с пневмолинией питания системы остается запертым соплом Са и в камеру Ь клапана не поступает. Второй входной сигнал устройства дистанционного управления 11, поступающий от задатчика давления 5 попадает в камеру f пневморе- ле 15 и через его открытое сопло Cs в камеру д и одновременно на вход электропневматического клапана 13. Так как в автоматическом режиме раб„аты дистанционный переключатель .10 электрически заблокирован таким образом, что электрический сигнал на катушку электропневматического клапана 13 не поступает, то сопло Сз - открыто и входной пневматический сигнал этого клапана поступает в камеру d, далее через канал :между камерами II попадает в камеру е электропневматического клапана 13 м через пневмоемкость 16 поступает к регулятору температуры теплоносителя обратного действия 4 и является фактически обычным сигналом задания регулятора, который сравнивается с сигналом Pt от устройства замера температуры и вырабатывается сигнал Рупр. обычный в автоматическом режиме. Управляющий сигнал Рупр. поступает к позиционеру 7, который в свою очередь вырабатывает сигнал Рприв., непосредственно воздействующий на мембрану привода 8 мотор-вентилятора 3, где он преобразуется в перемещение мембраны,
Таким образом, включение устройства дистанционного управления 11 в систему не оказывает влияния на процесс регулирования в автоматическом режиме работы системы.
В дистанционном режиме работы системы переключатель режимов работ 9 находится в положении Диет,, при этом электрический сигнал поступает на катушку
злектропневматического клапана 12 и под воздействием напряжения на катушке электромагнита к якорю с соплом Ci притягивается заслонка .18, преодолевая усилие пружины и тем самым закрывая сопло Ct,
одновременно открывая ранее запертое сопло Са.через которое поступает в камеру bn ранее запертый на входе сигнал РПит. пнев- мосистемы и далее через выход электропневматического клапана 12 в камеры д и
h пневмореле 15, При этом закрывается соплом Св пневмореле 15 и открывается сопло Се, что приводит к тому, что сигнал РЭзд, от задатчика давления 5 запирается и на еход электропневматического клапана 13
поступает не Рзад., а РПИТ. пневмосистемы, которое дальше попадает через OTkpbiToe сопло Сз в камеру d, канал II, в камеру е и далее на вход регулятора температуры теплоносителя обратного действия 4 через
пневмоемкость 16,
Поступление на вход регулятора температуры теплоносителя обратного действия РПИТ., а не Рзад. позволяет получать на выходе его выходное давление, уровень которого
создает в мембранной полости привода вентилятора максимальное давление, обеспечивающее минимальный угол разворота лопастей, независимо от текущего значения выходного давления устройства замера температуры, но мотор-вентилятор при этом не вращается, так как разомкнута электрическая цепь питания включения его. Для обеспечения вращения мотор-вентилятора в дистанционном режиме работы системы,
необходимо перевести дистанционный переключатель 10 в положение Вкл., при этом начнет поступать электрический сигнал на контактор 2 включения мотор-вентилятора 3, который начнет вращаться с
минимальным углом разворота лопастей и таким образом будет достигнута его пневматическая разгрузка в момент запуска в дистанционном режиме работы системы. Одновременно с этим происходит переключение пневмоконтактов электропневматического клапана 13, связанное с поступлением электрического сигнала на обмотку его катушки от включенного дистанционного переключателя 10, при этом
закрывается ранее открытое сопло Сз и открывается ранее закрытое сопло C/j, что обеспечивает постепенное снижение давле-. ния в мембранной полости привода мотор- вентилятора за счет отсечения
пневмолинии, связывающей выходное давление от задатчика давления 5 с регулятором температуры теплоносителя обратного действия 4 и одновременного ее сообщения с атмосферой через пневмоемкость 16, электропневматический клапан 12 и регулируемое пневмосопротивление 14.
Благодард этому в дистанционном режиме работы достигается запуск мотор-вентилятора с минимальным углом разворота лопастей, что позволяет снизить аэродинамическое сопротивление воздуха лопастям, и тем самым осуществить запуск с минимальными затратами электрической энергии, что в конечном итоге позволит повысить надежность и долговечность пусковой контактной электрической аппаратуры.
Формула изобретения Система регулирования температуры теплоносителя двигателя внутреннего сгорания, содержащая датчик - реле температуры теплоносителя, контакторноё устройство, связанное с мотором-вентилятором, и регулятор температуры теплоноси- теля обратного действия, подключенный
0
5
0 5
первым входом к задатчику давления через пневмолинию, вторым - к устройству замера температуры теплоносителя, а выходом - посредством позиционера к приводу мотора-вентилятора, отличающаяся тем, что, с целью снижения затрат электроэнергии и повышения долговечности, она снабжена переключателем режима работ, дистанционным переключателем, устройством дистанционного управления с двумя входами и двумя выходами, выполненными в виде первого и второго элэктр пневмати- ческих клапанов, регулируемого пневмосоп- ротивления, пневмореле и пневмоемкости, причем первый вход устройства дистанционного управления подключен через первый электропневмоклапан к пневмолинии, второй вход - к задатчику давления посредством пневмореле, первый выход соединен с приводом мотора-вентилятора через пневмоемкость, второй выход соединен с атмосферой посредством регулируемого пневмосопротивления, первый электропневмоклапан связан с переключателем режимов работ, а второй - с дистанционным переключателем.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инструкция по эксплуатации и техническое описание, 2125.20.51.00147 Ворошиловград, 87 г., с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Система охлаждения двигателя внутреннего сгорания | 1987 |
|
SU1463941A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
