Изобретение относится к способам контроля кинематической погрешности зубчатых механизмов и может быть использовано для контроля зуборезных станков и зубчатых механизмов различных видов.
Известен способ контроля кинематической погрешности зубчатых механизмов, заключающийся в том, что с установленных на входном и выходном звеньях контролируемого механизма магнитных датчиков считывают равномерно нанесенные через возможно малые угловые расстояния магнитные метки, формируют из считанного сигнала запускающие импульсы и определяют функцию кинематической погрешности.
Однако такой способ имеет невысокую точность измерений из-за предельной величины кинематической погрешности, которая не должна быть больше углового расстояния между метками, и низкую информативность сигнала из-за того, что число меток, которое можно нанести на датчик, ограничено максимальным значением погрешности.
Цель изобретения - повысить точность и информативность измерений. Для этого по предлагаемому способу определяют разность количества импульсов, поступивших с датчиков входного и выходного звеньев, и преобразуют в пропорциональное их числу напряжение.
При этом шумы магнитной записи не оказывают влияния на точность измерения, в виду того, что в предлагаемом способе отклонение временного положения импульсов в пределах половины периода между метками не имеет особого значения.
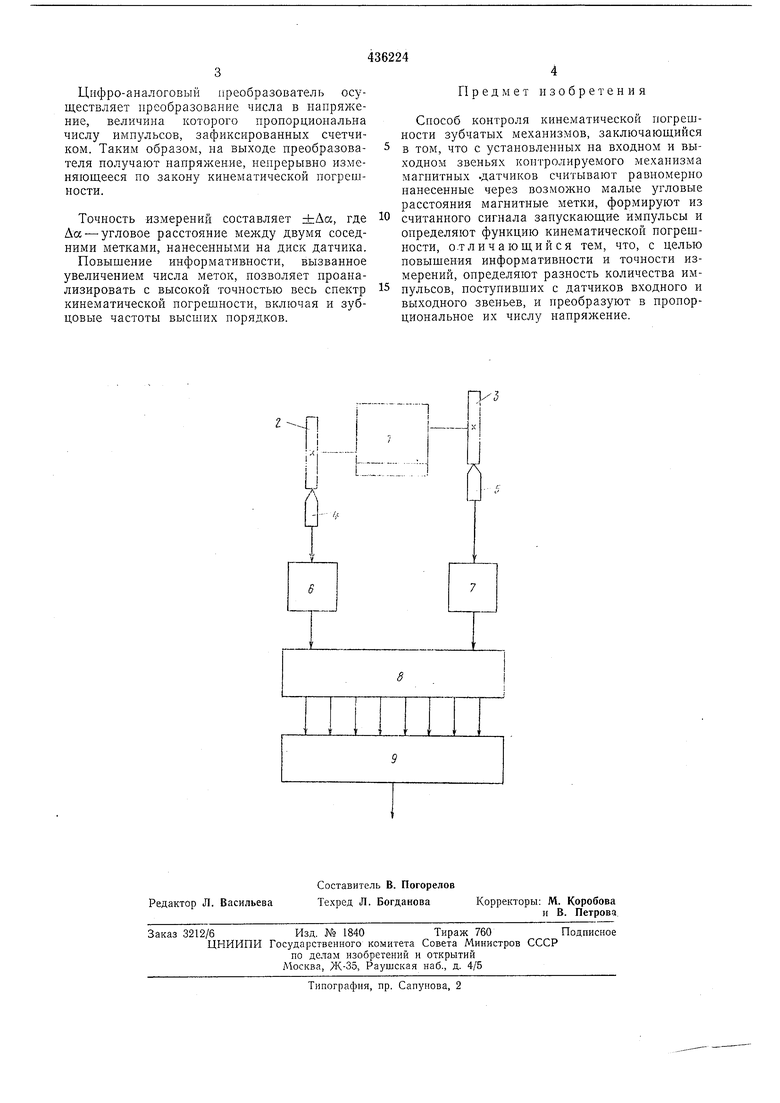
На чертеже приведена схема, поясняющая предлагаемый способ.
С установленных на входном и выходном звеньях контролируемого механизма 1 датчиков 2 и 3 с помощью магнитных головок 4 и 5 считывают магнитные метки. Из них с помощью формирователей 6 и 7
формируют короткие запускающие импульсы, которые подаются на реверсивный или разностный счетчик 8.
Каждая метка соответствует определенному элементарному углу. Общее число меток,
зарегистрированное реверсивным (разностным) счетчиком в данный момент времени, умноженное на величину элементарного угла, соответствует угловому рассогласованию между входным и выходным валами, т. е.
текущему значению кинематической погрешности.
В целях обеспечения возможности работы с анализатором спектра, цифровую информацию преобразуют в аналоговую с помощью
цифро-аналогового преобразователя 9.
Цифро-аналоговый преобразователь осуществляет преобразование числа в напряжение, величина которого пропорциональна числу импульсов, зафиксированных счетчиком. Таким образом, на выходе преобразователя получают напряжение, непрерывно изменяющееся по закону кинематической погрешности.
Точность измерений составляет ±Аа, где Да -угловое расстояние между двумя соседними метками, нанесенными на диск датчика.
Повышение информативности, вызванное увеличением числа меток, позволяет проанализировать с высокой точностью весь спектр кинематической погрешности, включая и зубцовые частоты высших порядков.
Предмет изобретения
Способ контроля кинематической погрешности зубчатых механизмов, заключающийся
в том, что с установленных на входном и выходном звеньях контролируемого механизма магнитных .датчиков считывают равномерно нанесенные через возможно малые угловые расстояния магнитные метки, формируют из
считанного сигнала запускающие имнульсы и определяют функцию кинематической погрешности, отличающийся тем, что, с целью повышения информативности и точности измерений, определяют разность количества импульсов, поступивших с датчиков входного и выходного звеньев, и преобразуют в пропорциональное их числу напряжение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля кинематической погрешности зубчатых механизмов | 1975 |
|
SU579536A2 |
| Способ контроля кинематической погрешности зубчатых механизмов | 1972 |
|
SU442366A1 |
| Устройство контроля кинематическойпОгРЕшНОСТи зубчАТыХ пЕРЕдАч | 1979 |
|
SU847009A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2078302C1 |
| Способ контроля зубчатых передач | 1972 |
|
SU458704A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| СПОСОБ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ | 1972 |
|
SU325479A1 |
| СПОСОБ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ МЕХАНИЗМОВ | 1973 |
|
SU381876A1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ и ПРЕОБРАЗОВАНИЯ | 1964 |
|
SU164718A1 |
| УСТРОЙСТВО для КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТОГО МЕХАНИЗМА | 1973 |
|
SU406105A1 |
