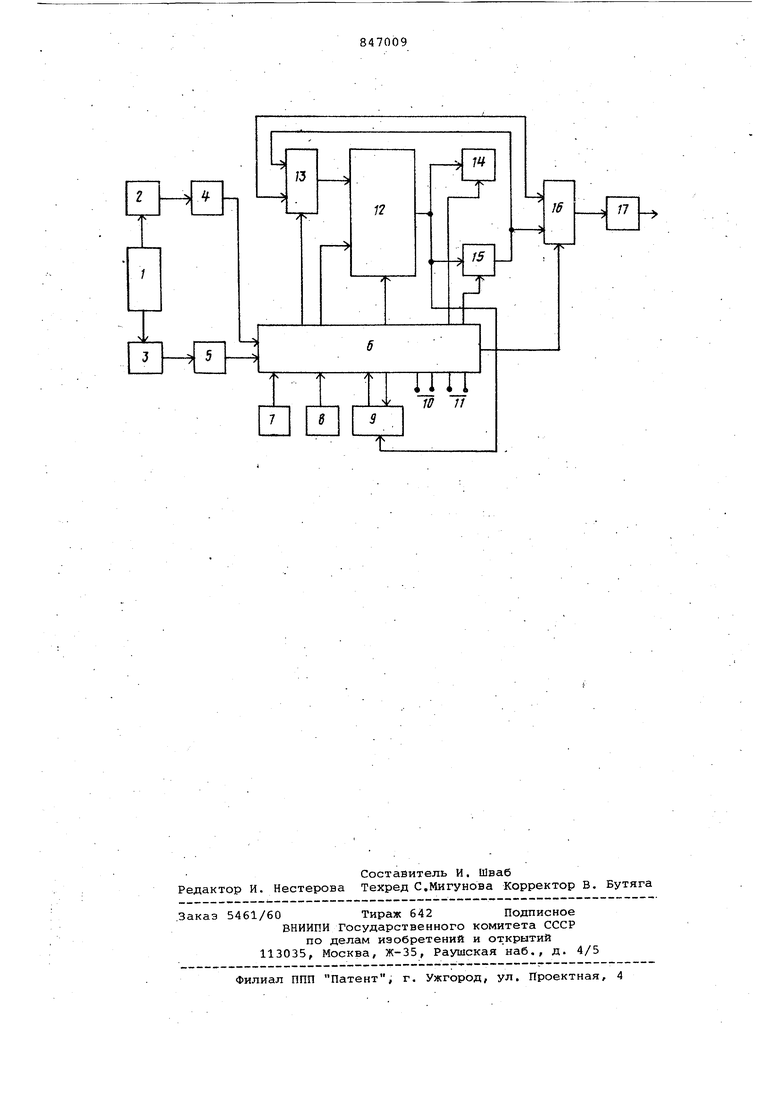
Изобретение относится к техническим измерениям в машиностроении, а именно к технике контроля кинематической погрешности зубчатых .передач. Известен способ контроля кинемати ческой погрешности зубчатых передач, заключающийся в том, что с установленных на начальном и конечном звень ях контролируемой передачи снимйют импульсы, согласовывают их по ч стоте и по разности количества импульсов, поступивших с датчиков начального и конечного звена, определяют величину кинематической погрешности, зубчатой передачи .. Недостатком этого способа являетс то, что импульсы, снимаемые с датчика начального или конечного звена, необходимо согласовывать по частоте в соответствии с передаточным отношением передачи. Наиболее близким к изобретению является способ контроля кинематичес кой погрешности зубчатых передач, за ключающийся в том, что с установленных на начальном и конечном звень ях контролируемой передачи импульсных датчиков считывают импульсы, формируют из них запускающие импульсы и добавлением или вычитанием соответст вующих весовых значений определяют кинематическую погрешность 2. Недостатке указанного способа является то, что при одновременном приходе импульсов с датчиков начального и конечного звеньев через время, меньшее чем время переходных процессов в реверсивном счетчике, последний переходит в неопределенное состо-яние и код на его выходе не будет соответствбвать действительному зна- чению кинематический погрешности передачи, что приводит к снижению точности контроля. Цель изобретения - повышение точности .контроля. Поставленная цель достигается тем, что определяют весовое значение при одновременном поступлении импульсов с обоих датчиков и по нему вместе с текущим значением кинематической погрешности определяют ожидаемое значение, которое служит в качестве текущего как при одновременном поступлении импульсов с обоих датчиков, так и при раздельном их поступлении а задержкой, по времени, меньшей необходимого на определение текущего значения кинематической погрешности или новых ожидаемых значений по первому из раздельно поступивших импульсов. На чертеже представлена блок-схема устройства, реализующего способ. Блок-схема содержит контролируемую передачу 1, датчики 2 и 3 началь ного и конечного звеньев, формирователи 4 и 5, блок 6 управления, кодирующие переключатели 7 и 8 для установки весовых коэффициентов, регистр 9 памяти для хранения весового коэффициента, кнопку 10 установки, кнопку 11 пуска, арифметический блок 12, коммутатор 13, регистры 14 и 15 памяти, коммутатор 16, цифро-аналого вый преобразователь 17. Способ осуществляется следующим образом. Предварительно на кодирующих пере ключателях 7 И 8 устана.влйвают весовые коэффициенты R и Rj,численные значения которых выбираются из соотношений : 2 -ТГ . р - 2 m . i где п - число импульсов на оборот ва ла датчика 3 конечного звена m - число имйульсов на оборот вала датчика 2 начального звена; 1 - передаточное отношение иссле дуемой зубчатой передачи 1. После нажатия кнопки 10 установки по командам блока б управления при помощи арифметического блока 12 производится расчет коэффициента Rv R + R, численное значение которо го равно весовому значению, соответствующему одновременному приходу импульсов с формирователей 4 и 5, и записывается в регистр 15 памяти, а в регистр 14 памяти записываемся нул вой код. После выполнения указанных операций устройство готово к работе Нажатие кнопки 11 пуска переводит ус ройство в рабочее состояние. Сигналы с выходов импульсных датчиков 2,3 начального и конечного звеньев ис. следуемой зубчатой передачи 1 поступают, соответственно, на входы формиров ателей 4 и 5, которые формируют из них короткие запусканяцие импульсы. При этом последовательнос операций, выполняемых арифметически блоком 12, распределение результато вычислений в регистрах: 14 и 15 памяти и их извлечение определяется блоком б управления в соответствии с создавшейся ситуацией отражающей последовательность прихода импульсо с формирователей 4, 5. Так, по приходу импульса от одного из датчиков после нажатия кнопки 11 пуска в регистр, в котором ранее был записан нулевой код (регистр 14 пг1мяти) , за писывается код, равный весовому зна нию прихода импульса с датчика 2 ачального или 3 конечного звена (R или R). Через время, равное двоенному максимальному времени, еобходимому на суммирование двух исел арифметическим блоком 12 и апись результата суммирования в егистр 14 памяти, по команде блока 6 управления через коммутатор 16 код из регистра 14 памяти подается в цифро-аналоговый преобразователь 17, который преобразует его в аналоговое напряжение. Если следующий импульс, поступающий на вход блока б управле-, ния по одному из каналов, приходит через время, большее или равное указанному выше, то при его поступлении код, -хранящийся в регистре 15 теку1цего значения кинематической погрешности, подается через коммутатор 13 на один из входов арифметического блока 12, и по команде блока б управления к нему добавляется сначала код R,,,, а результат суммирования, соответствующий ожидаемому значению кинематической погрешности для случая одновременного поступления импульса по обоим каналам, записывается в служебный регистр 15 памяти. Затем к коду текущего значения добавляется код, соответствующий весовому значению наступившего, события т.е. R или R,j, и результат суммирования, соответствующий новому текущему значению кинематической погрешности, по команде блока б управления записывается в регистр 14 памяти текущего значения и через коммутатор 16 подается на вход цифро-аналогового преобразователя 17. Эта последовательность операций сохраняется в том случае, если время между поступлением на входы блока б управления импульсов по обоим каналам не меньше указанного выше интервала времени. В том случае, когда задержка поступления импульсов по каналу, противоположному каналу ранее поступившего импульса, меньше .вышеуказанного интервала времени, последовательность операций, выполняемых арифметическим блоком 12, а также записи и извлечения результатов вычислений осуществляются следующим образом. При поступлении первого из импульсов вычисляется ожидаемое значение и записывается в соответствукяций регистр, а рассчитанное затем новое текущее значение, которое записывается в регистр текущего значения, по истечении указанного выше интервала времени через коммутатор 16подается на вход цифро-аналогового преобразователя 17. Поступление задержанного импульса приводит к тому, что в момент выдачи текущего значения, рассчитанного для предыдущего импульса, через коммутатор 16 на вход цифро-аналогового преобразователя 17код с выхода регистра 15, в котором хранится рассчитанное ожидаемое значение, через коммутатор 13 по команде блока 6 управления подается на вход арифметического блока 12 и к нему добавляется код R,, а результат в.ычислений, являющийся новым ожидаемым значением, записывается в регистр 14 памяти, в котором ранее хранилось текущее значение, а ожидае мое значение, рассчитанное для преды дущего импульса, является- в данном случае текущим и по команде блока б отправления через коммутатор 16 подается на. вход цифро-аналогового преобразователя 17, В результате регист ры 14 и 15 памяти текущего и ожидаемого значения кинематической погрешности меняются местами. При одновременном приходе импульсов по текущему значению вычисляется новое ожидаемое значение кинемати-. ческой погрешности добавлением кода Rg к текущему значению, и результат вычислений записывается в регистр 15 памяти ожидаемого значения и по команде блока 6 управления через комму татор 16 подается в качестве нового текущего значения на вход цифро-. аналогового .преобразователя 17. Решение об одновременном приходе импульсов по обоим каналам принимается при совпадении моментов прихода коротких запускающих импульсов, сформирован.ных из сигналов импульсны дачтиков 2 и 3 формирователями4, 5. Таким образом, на выходе коммутатора 16 присутствуют коды, соответствующие кинематической пргрешнос ти, а на выходе цифро-аналогового преобразователя - напряжение, пропорциоНсшьное кинематической погрешности исследуемого зубчатого механизма, задержанное на фиксированный интервал времени, причем результат измере НИИ не зависит от того, одновременно или с задержкой приходят импульсы с датчиков начального и конечного звеньев передачи 1. Применение предложенного способа позволит контролировать кинематическую пЬгрешность зубчатых механизмов с любым передаточнымотношением с возможностью применения датчиков, устанавливаемых на ведущих и ведоьшх звеньях как с одинаковьв, так и с различным числом импульсом, выдавае мых за оборот вала датчика. .Формула изобретения Способ контроля кинематической погрешности передач, заключающийся в том, что с установленных на начальном и конечном звеньях контролируемой передачи импульсных датчиков считывают импульсы, формируют из них запускающие импульсы и добавлением или вычитанием соответствующих весовых значений определяют кинематическую погрешность, о т л и ч а ю щ и и с я тем, что, с целью повышения точности контроля, определяют весовое значение при одновременном поступлении.импульсов с обоих датчиков и по нему, вместе с текущим значением кинематической погрешности, определяют ожидаемое значение, которое служит э качестве текущего как при одновременном поступлении импульсов с обоих датчиков, так и при раздельном их поступлении с задержкой по времениi меньшей необходимого на определение текущего значения кинематической погрешности или новых ожидаемых значений по первому из раздельно поступивших импульсов, I, источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 431387, кл, G 01 8 7/28, 1971. 2. Авторское свидетельство СССР 579536, кл. G 01 В 7/28, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для коррекции циклических ошибок | 1985 |
|
SU1293697A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Устройство для считывания изображений | 1988 |
|
SU1642488A2 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1120158A1 |