Изобретение относится к контролю кинематической погрешности зубчатых механизмов и может быть использовано для контроля зуборезных станков и зубчатых механизмов. Сигналы с датчиков, установленных на входном и выходном ЗБеньях контролируемого механизма, согласовывают по частоте при помощи деталей. Разность фаз между сигналами характеризует измеряемую величину и измеряется при помощи масштабных меток, которые формируют из сигнала датчика, установленного на выходном звене Ij .
Недостаток такого способа - низкая информативность при контроле механизмов с дробным передаточным отношением.
По основному авт. св. № 436224 известен способ контроля кинематической погрешности зубчатых механизмов, при котором с магнитных датчиков, установленных на входном и выходном звеньях контролируемого механизма, считывают равномерно нанесенные через возможно малые угловь.1е расстояния махнитные метки и формируют из считанного сигнала запускающие импульсы. Затем определяют разность ко-пичества импульсов, поступивших с датчиков входного и выходного звеньев и преобразуют в пропорциональное их числу напряжение,по которому можно судить о функции кинематической погрешности.
Недостатком этого способа является то, что числа меток на датчиках должны соответствовать передаточному отношению контролируемого механизма, и в случае контроля други,-. механизмов необходимо менять датчики или числа меток на них, что сопряжено с большими неудобствами и требует дорогостоящего оборудования.
Цель изобретения - увеличение функциональных возможностей при контроле мб-ханизмов с любыми передаточными отношениями .
Для этого сигналы одного из каналов подают одновременно на несколько входов реверсивного счетчика, имеющих различные весовые значения.
На чертеже изображена б.г1ок-схема устройства, реализующего способ.
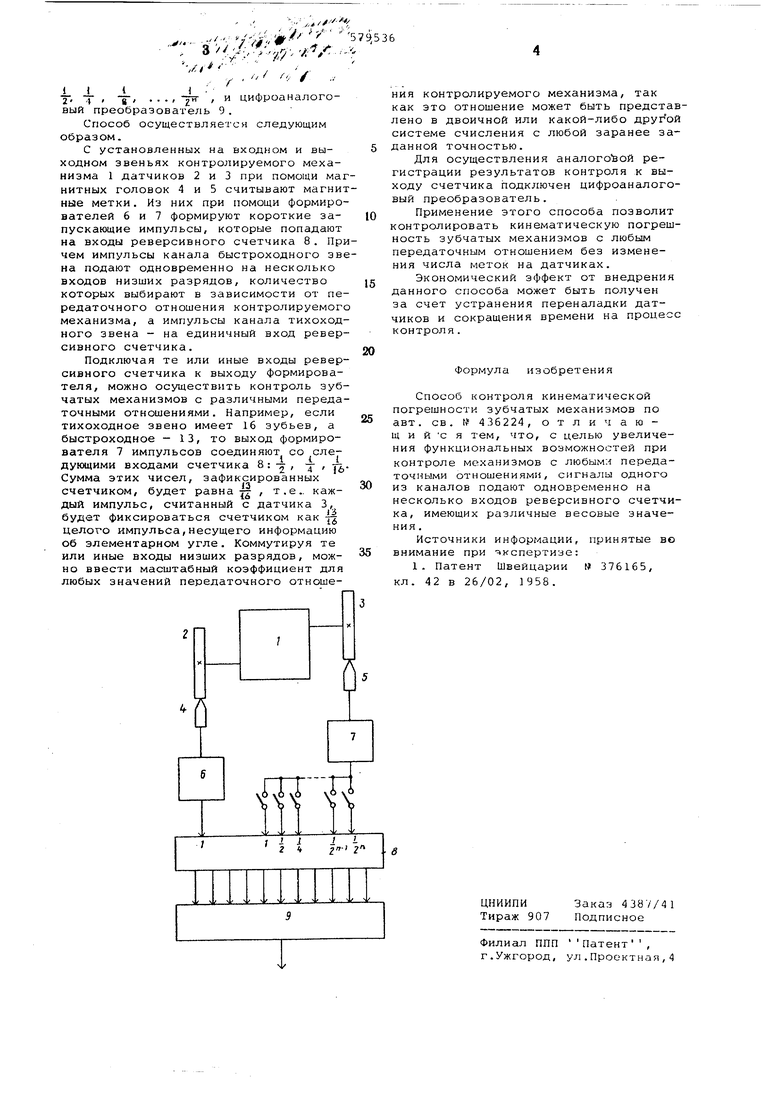
Блок-схема содержит контролируемый механизм 1, датчики 2 и 3, ма1нитн1..1С головки 4 и 5, формиронатели 6 и 7 импульсов, реверсивныГ счетчик В с единичным и многокапа.;:.ными входами, .причем Bxonrj низших рецерсииного сче-1-чкка имеют весовые зна-и.нич: . - 3 .V/ /,-/ . и цифроаналоговый преобразователь 9 . Способ осуществляется следующим образом. С установленных на входном и выходном звеньях контролируемого механизма 1 датчиков 2 и 3 при помощи ма нитных головок 4 и 5 считывают магни ные метки. Из них при помощи формиро вателей 6 и 7 формируют короткие запускающие импульсы, которые попадают на входы реверсивного счетчика 8. Пр чем импульсы канала быстроходного эв на подают одновременно на несколько входов низших разрядов, количество которых выбирают в зависимости от пе редаточного отношения контролируемог механизма, а импульсы канала тихоход ного звена - на единичный вход ревер сивного счетчика. Подключая те или иные входы ревер сивного счетчика к выходу формирователя, можно осуществить контроль зуб чатых механизмов с различными переда точными отношениями. Например, если тихоходное звено имеет 16 зубьев, а быстроходное - 13, то выход формирователя 7 импульсов соединяют со следующими входами счетчика 8 : -| , т , -Л Сумма этих чисел, зафиксированных счетчиком, будет равна || , т.е.. каждый импульс, считанный с датчика 3, будет фиксироваться счетчиком как Ц целого импульса,несущего информацию об элементарном угле. Коммутируя те или иные входы низших разрядов, можно ввести масштабный коэффициент для любых значений передаточного отношения контролируемого механизма, так как это отношение может быть представлено в двоичной или какой-либо другой системе счисления с любой заранее заданной точностью. Для осуществления аналоговой регистрации результатов контроля к выходу счетчика подключен цифроаналоговый преобразователь. Применение этого способа позволит контролировать кинематическую погрешность зубчатых механизмов с любым передаточным отношением без изменения числа меток на датчиках. Экономический эффект от внедрения данного способа может быть получен за счет устранения переналадки датчиков и сокращения времени на процесс контроля. Формула изобретения Способ контроля кинематической погрешности зубчатых механизмов по авт. св. № 436224, отличаюЩ и и С я тем, что, с целью увеличения функциональных возможностей при контроле механизмов с любыми передаточными отношениями, сигналы одного из каналов подают одновременно на несколько входов реверсивного счетчика, имеющих различные весовые значения . Источники информации, принятые во внимание при экспертизе: 1. Патент Швейцарии 376165, кл. 42 в 26/02, 958.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ МЕХАНИЗМОВ | 1972 |
|
SU436224A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Устройство контроля кинематическойпОгРЕшНОСТи зубчАТыХ пЕРЕдАч | 1979 |
|
SU847009A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| Устройство для измерения мертвого хода отсчетных и зубчатых передач | 1985 |
|
SU1293479A1 |
| Способ измерения кинематической погрешности механизмов с дробным передаточным отношением | 1985 |
|
SU1325295A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Датчик сил упругой деформации механизма и устройство для его настройки | 1985 |
|
SU1288511A1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
