1
Изобретение относится к области контроля и регулирования различных параметров с помощью средств центротехники.
РЬвестны 1машины централизованного контроля, осуществляюндие .-поочередно опрос датчиков через устройство связи с объектами, сравнение сигнала датчика с уставкой, цифровое преобразование величины отклонения сигнала датчика от уставки, цифровую индикацию этой величины и выдачу через устройство связи с объектами управляющего воздействия, реализующего трехпозиционный закон регулирования.
Следует отметить, что в машинах централизованного контроля, осуществляющих измерение отклонения параметра от уставки, основным элементом цифрового преобразователя является широтно-импульсный модулятор, преобразующий величину отклонения в пропорциональную ей длительность импульса, заполняемого стабильной частотой. Этот способ преобразования отличается простотой и высокой надежностью.
Однако трехпозиционный закон регулирования, особенно для инерционных объектов с исполнительными механизмами астатического типа, не обеспечивает удовлетворительного качества регулирования, так как в таких системах неизбежно возникают автоколебания, что приводит к большому перерегулированию, причем для регулирования параметра в обратную сторону вновь повторяется вышеописаниый процесс перерегулирования.
В системах централизованного контроля и регулирования (СЦКР) целесообразно применение пропорционально-импульсного закона регулирования, существенно повышающего качество регулирования.
При пропорционально-импульсном законе регулирования на исполнительный механизм астатического типа подается команда «больше либо «меньше в виде импульса, длительность которого пропорциональна величине отклонения параметра от уставки.
После интегрирования этой команды исполнительным механизмом вырабатывается регулирующее воздействие, пропорциональное величине отклонения.
При следующем обходе точек контроля (т. е. через некоторое время) вновь проверяется состояние объекта, и при необходимости корректируется величина регулирующего воздействия.
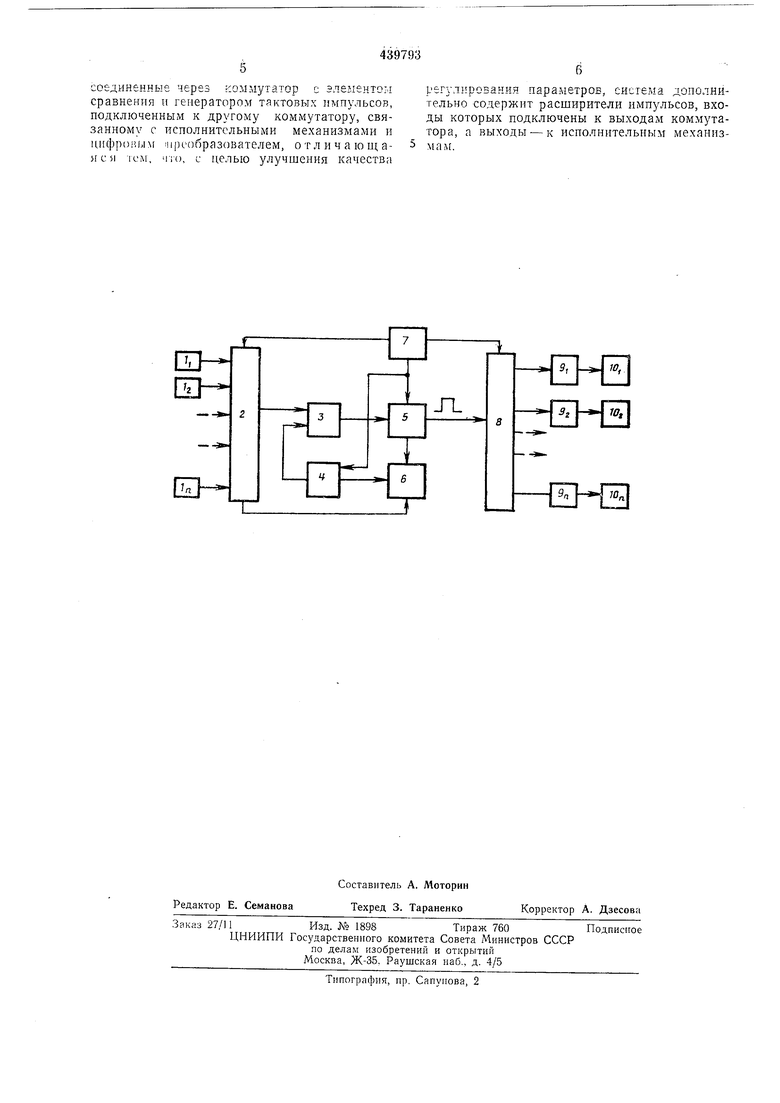
Применение пропорционально-импульсного закона регулирования существенно повышает качество регулирования параметров. Трудность реализации cucieiM с пролорцпинально-импульсным законом регулирования заключается в том, что по каждой точке контроля необходимо время для отрабогки длительности регулирующего имиульса исиолиительным механизмом (для существующих исполнительных механизмов время отработки полного хода исиолнительного механизма составляет до 30-60 сек), аюсле чего СЦКР может перейти на следующую точку. Это обстоятельство резко уменьшает быстродействие системы и ухудшает качество регулировагпш параметров. Недостатком известных систем централизованного контроля и регулирования является низкое качество регулирования параметров. Целью изобретения явилась разрабогка структуры системы централизованного контроля и регулирования, обеспечивающей высокое качество регулирования параметров с сохранением быстродействия известных СЦКР. Поставленная цель достигается тем, что выход широтно-нмпульсного модулятора цифрового преобразователя через коммутатор исполнительных механизмов связан с расширителями имлульсов, соединенными с соответствующими исполнительными механизмами. На чертеасе приведена структурная схема предлагаемой системы. Предлагаемая система содержит датчики 1 - In измеряемых и регулируемых параг 1етров, коммутатор 2 сигналов датчиков, элемент сравнения 3, задатчик уставок 4, цифровой преобразователь 5, устройство регистрации 6, генератор 7 тактовых импульсов, коммутатор 8 исполнительных механизмов, расширители импульсов 9-9п и исполнительные механизмы 10-10п. Датчики 1 - Iji измеряемых параметров через коммутатор 2 сигналов датчиков подключены к элементу сравнения 3. К другому входу элемента сравпения 3 подключен задатчик уставок 4. Выход элемента сравпения 3 через цифровой преобразователь о связан с устройством регистрации 6. Цифровой преобразователь о через комммутатор 8 исполнительных механизмов связан с расширителями импульсов . каледый из которых соединен со своим исполнительным механизмом. Кроме того, устройство регистрации 6 связано с коммутатором сигналов датчиков и с задатчиком уставок 4. Генератор 7 тактовых импульсов связан с коммутатором 2, с цифровым преобразователем 5, коммутатором 8 и задатчиком уставок 4. Работа предлагаемого устройства протекает следующим образом. По команде генератора 7 происходит поочередное подключение с помощью коммутатора 2 датчиков li-In, а также поочередный выбор сигналов задатчика уставок 4. На элементе сравнения 3 происходит сравнение сигналов датчика с соответствующей уставкой. и сигнал отклонения поступает на вход цифв котором образурового преобразователя о, (код) измеряемой ется числовой эквивалент величины отклонения. Этот код поступает на устройство регистрации О, куда аюстуиает также код установки из задатчика уставок 4 и номер подключенно точки из коммутатора 2. Коммутатор 8 переключается синхронно с коммутатором 2. Это может быть, в частном случае, один и тот коммутатор, который производит поочередное подключение входов расширителей импульсов 9i-9п к выходу широтно-импульсного модулятора цифрового преобразователя 5. Импульс с широтно-имнульсного модулятора 5 иостуиает на расширитель импульсов, где расширяется во времени. Например, импульсу широтно-импульсиого модулятора в 1 м/сек соответствует импульс расширителя импульсов 9, равный 1 сек, импульсу 5 м/сек -5 сек и т. д. Коэффициент расширения импульса выбирается из требований к точности системы регулирования и вида обьекта. (Схема такого расширителя весьма просто решается лутем обеспечения в течение длительности импульса модулятора заряда емкости с малой постоянной времени и с последующим разрядом этой емкости с большо постоянной времени. Нри этом коэффициент расширения определяется соотношением постоянных времени заряда и разряда). Импульс расширителя импульсов, пропорпиональный длительности импульса модулятора и, как следствие, отклонению параметра от уставки,, поступают на соответствующий исполпптельный механизм. Очередное регулир ющее воздействие па данный объект выдается при следующем обходе точек контроля. Скорость опроса точек контроля при прочих неизменных условиях обуславливается временем преобразования сигнала отклонения код, т. е. максимальной длительности импул,са широтно-импульспого модулятора цифрового преобразователя 5. Это вре1мя можно выбрать весьма малым, а за счет расширителя импульсов удлинить до необходимой величины. Тогда после выдачи импульса модулятором цифрового преобразователя 5 на расш ;ритель импульсов коммутаторы 2 и 8 переключаются, не ожидая .регулирующего воздействия на исполнительный мехапизм 10, на следующую точку и т. д., т. е. параллельно работают несколько исполнительных механизмов, а схема контроля при этом обладает требуемым быстродействием обегапия. Применение пропорционально-импульспо1ч) закона регулирования при сохранении требуемого быстродействия обегания точек контроля (т. е. при обеспечении требуемого период;. регулирования) позволяет более мягко без .перерегулирований и автоколебаний вести процесс регулирования параметров. Предмет изобретения Система регулирования параметров:микроклимата, содержащая датчики параметров.
соединенные через ко:,111утатор с элементом сравнения и генератором тактовых импульсов, подключенным к другому коммутатору, связанному с исполнительными механизмами и цифровым иреобразователем, отличающая с я тем, что, с целью улучшения качества
6
регулирования параметров, система дополнительно содержит расширители импульсов, входы которых подключены к выходам коммутатора, а ВЫХОДЫ-к исполнительным механизмам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования параметров микроклимата | 1983 |
|
SU1158999A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 1972 |
|
SU351201A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366998C2 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство для централизованного контроля параметров | 1981 |
|
SU962864A1 |
| Способ регулирования микроклимата в теплице и система для его осуществления | 1991 |
|
SU1819537A1 |
| Устройство для регулирования соотношения доз компонентов | 1977 |
|
SU732827A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА ПО ПРЕВЫШЕНИЮ МОЩНОСТИ | 2017 |
|
RU2673448C1 |
| СИСТЕМА МНОГОТОЧЕЧНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU316084A1 |