Изобретение относится к системам автоматического управления металлорежущими станками и может быть использовано, например, в токарных и карусельных станках для поддержания постоянства скорости резания.
Известно устройство для управления станком, содержащее импульсный датчик, блок реверса, реверсивный счетчик, блок ввода и блок управления электроприводом главного движения. В свою очередь блок реверса состоит из логического переключателя, узла реверса и двух линий задержки, а блок управления содержит задатчик скорости резания, блок сравнения, усилитель, интегрирующий усилитель, цифроаналоговый преобразователь [1].
Данное устройство предназначено для работы совместно с широкорегулируемым электроприводом и при других вариантах привода главного движения, например включающего в себя автоматическую коробку скоростей или комбинированного, не может быть использовано, что ограничивает его область применения.
Наиболее близким по технической сущности и по совокупности принципов реализации к заявляемому изобретению является устройство для управления станком [2], выбранное в качестве прототипа.
Устройство содержит последовательно соединенные импульсный датчик, блок реверса, реверсивный счетчик, установочные входы которого соединены с выходами задатчика перемещения, а выход переноса подключен к управляющему входу блока реверса, последовательно включенные первый и второй делители частоты, преобразователь частоты в напряжение, усилитель с переменным коэффициентом передачи, прямой и инверсный выходы которого через переключатель подключены к регулятору скорости главного привода станка, управляющие входы первого делителя частоты подключены к информационным выходам задатчика скорости резания, а второго делителя частоты соединены с информационными выходами реверсивного счетчика, последовательно соединенные генератор импульсов, блок формирования временных интервалов и буферный регистр, выходы которого соединены с входами блока управления автоматической коробкой скоростей главного привода станка и с управляющими входами усилителя с переменным коэффициентом передачи, причем выход генератора импульсов подключен к тактовому входу первого делителя частоты, выход второго делителя частоты соединен с синхронизирующим входом буферного регистра и управляющими входами блока формирования временных интервалов.
Недостатком данного устройства является то, что принятый способ переключения диапазонов коробки скоростей в функции частоты приводит к снижению допустимого момента нагрузки на валу двигателя. Другим недостатком является то, что при отключении питания и повторном запуске требуется первоначальная установка кода счетчика, пропорционального радиусу обработки, путем перевода суппорта в начальную точку отсчета. Кроме того, сервисные функции данного устройства по индикации текущих параметров и их передаче на устройство отображения ограничены. Дополнительным недостаток является запаздывание формирования сигнала управления скоростью двигателя главного движения. Данное запаздывание обусловлено тем, что постоянная времени преобразователя частоты в напряжение выбирается исходя из условия сглаживания импульсных последовательностей с наименьшей частотой. При этом наибольшее запаздывание проявляется в диапазоне верхних частот, где изменение скорости привода главного движения наиболее интенсивно.
Сущность изобретения заключается в расширение функциональных возможностей устройства управления, позволяющих оптимизировать работу привода главного движения.
Технический результат заключается в повышении быстродействия и допустимого момента нагрузки на валу двигателя привода главного движения. Дополнительные преимущества обусловлены возможностями по расширению сервисных функций устройства управления по индикации текущих параметров и работы в составе системы числового программного управления.
Указанный технический результат достигается тем, что в известном устройстве управления станком, содержащем главный привод, включающий в себя регулируемый электропривод с регулятором скорости и автоматическую коробку скоростей, электромагнитные муфты которой подключены к силовому блоку управления, задатчик скорости резания, последовательно соединенные импульсный датчик, двухканальный формирователь импульсных последовательностей, блок реверса, два выхода которого подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика, установочные входы которого соединены с выходами буферного регистра, а выход нулевого состояния подключен к управляющему входу блока реверса, усилитель с переменным коэффициентом передачи, прямой и инверсный выходы которого через переключатель подключены к регулятору скорости главного привода станка, согласно изобретению, введены микроконтроллер, задатчик режимов работы, выходы которого подключены через первый блок гальванической развязки с первыми дискретными входами и входом запроса прерывания микроконтроллера, драйвер последовательного интерфейса, информационный вход которого соединен с выходом передатчика, информационный выход - с входом приемника, а управляющий вход - с первым дискретным выходом микроконтроллера, регистр данных, информационные входы которого соединены с информационными выходами реверсивного счетчика, а синхронизирующий вход подключен через элемент И, элемент ИЛИ к двум выводам блока реверса, первый и второй шинный драйверы соединенные входами соответственно с младшими и старшими разрядами регистра данных, а выходами совместно с первыми и вторыми информационными входами буферного регистра - с шиной адресов/данных микроконтроллера, первый и второй низкочастотный фильтры, входы которых соединены с выходами двух каналов широтно-импульсного модулятора микроконтроллера, а выходы с учетом их веса - через сумматор с аналоговым входом усилителя с переменным коэффициентом передачи, причем выход задатчика скорости соединен с входом аналого-цифрового преобразователя микроконтроллера, первый старший разряд шины адреса микроконтроллера подключен к входам селекции первого драйвера шины и младших разрядов буферного регистра, а второй старший разряд шины адреса - к входам селекции второго драйвера шины и старших разрядов буферного регистра, входы управления драйверов шины подключены к выходу чтения шины управления микроконтроллера, а входы синхронизации записи младших и старших разрядов буферного регистра - к выходу записи шины управления, второй вход элемента И подключен к второму выходу дискретного порта микроконтроллера, вход установки реверсивного счетчика соединен с третьим выходом дискретного порта микроконтроллера, вход управления переключателя соединен с четвертым выходом дискретного порта микроконтроллера, пятые выходы дискретного порта микроконтроллера, число которых равно числу ступеней, подключены к управляющим входам усилителя с переменным коэффициентом передачи и через второй блок гальванической развязки к входам силового блока управления.
Проведенный заявителем поиск по патентным и научно-техническим источникам информации позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности существенных признаков аналога, позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует условию "Новизна".
Для проверки соответствия заявленного изобретения условию "Изобретательский уровень" заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного устройства. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известных аналогов, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижения технического результата, в частности, заявленным изобретением, не предусматривается следующее:
- определение моментов переключения ступеней коробки скоростей в функции скорости;
- использование дополнительных путевых выключателей для управления коробкой передач;
- использование делителей частоты для формирования гиперболической зависимости частоты вращения от радиуса обработки,
- использование конструктивных особенностей импульсного датчика и каналов формирования импульсных последовательностей, не изменяющих принцип работы устройства.
Описываемое изобретение не основано на изменении количественных признаков, введение известных блоков (микроконтроллера, блоков гальванической развязки, шинных драйверов, драйвера последовательного интерфейса, низкочастотных фильтров, аналогового задатчика скорости) и представление таких признаков во взаимосвязи вытекает из основной идеи изобретения - использовать микроконтроллер как дополнительный решающий блок, а его периферию для реализации специализированных задач формирования сигналов управления. Причем интерфейсный узел слежения за текущим радиусом обработки конструктивно не имеет аналога из состава периферии МК.
Следовательно, заявленное изобретение соответствует условию «Изобретательский уровень».
Сущность изобретения поясняется графическими материалами, на которых показана на фиг.1 - функциональная схема устройства управления, на фиг.2 - диаграммы, поясняющие работу устройства.
Устройство содержит микроконтроллер (МК) 1, задатчик 2 режимов работы, выходы которого подключены через блок 3 гальванической развязки с первыми входами (Pi1…Pi5) дискретного порта и входом (Int) запроса прерывания МК, задатчик 4 скорости резания, соединенный выходом с входом (ADC) аналого-цифрового преобразователя МК, драйвер 5 последовательного интерфейса, управляющий вход которого подключен к первому выходу (Po1) дискретного порта МК, информационный вход с выходом передатчика (TXD), а информационный выход с входом приемника (RXD) МК, последовательно соединенные импульсный датчик 6 перемещения, двухканальный формирователь 7 импульсных последовательностей, блок 8 реверса, первый и второй выходы которого в одном случае подключены соответственно к суммирующему и вычитающему входу реверсивного счетчика 9, а в другом - через элемент ИЛИ 10, элемент И 11 к синхронизирующему входу регистра 12 данных, соединенного информационными входами с информационными выходами счетчика 9, а информационными выходами подключенного через первый и второй шинный драйвер 13 и 14 к шине (AD) адресов/данных МК, подключенной также к первым и вторым информационным входам буферного регистра 15, выходы которого соединены с установочными входами счетчика 9, выходы (PWM1, PWM2) двух каналов широтно-импульсного модулятора МК подключены соответственно к первому и второму низкочастотному фильтру 15 и 16, соединенных выходами с учетом их веса с входами сумматора 17, подключенного выходом к аналоговому входу усилителя 18 с переменным коэффициентом передачи, прямой и инверсный выходы которого через переключатель 19 подключены к входу регулятора скорости главного привода 20. В свою очередь главный привод 20 станка содержит регулятор 21 скорости, усилитель 22 мощности, двигатель 23, вал которого соединен с датчиком 24 скорости, а через автоматическую коробку 25 скоростей - с механизмом вращения шпинделя. Электромагнитные муфты коробки скоростей подключены через силовой блок 26 управления к выходам блока 27 гальванической развязки. Причем первый старший разряд (А14) шины адреса МК подключен к входам селекции первого драйвера 13 шины и младших адресов буферного регистра 15, а второй старший разряд (А15) шины адреса - к входам селекции второго драйвера 14 шины и старших адресов регистра 15. Входы управления драйверов подключены к выходу чтения (RD) шины управления МК, а входы синхронизации записи младших и старших регистра - к выходу записи (WR) шины управления, второй вход элемента И 11 подключен к второму выходу (Ро2) дискретного порта МК, выход перехода через ноль реверсивного счетчика 9 соединен с управляющим входом блока реверса 8, а вход установки - с третьим выходом (Ро3) дискретного порта МК, вход управления переключателя 19 соединен с четвертым выходом (Ро4) дискретного порта МК, пятые выводы (Ро5…Ро5+k-1) дискретного порта МК, число которых равно числу ступеней, подключены к управляющим входам усилителя 18 и блока 27. Задатчик 2 содержит два переключателя 28 и 29, две кнопки 30 и 31, датчик 32 начальной точки отсчета, контакты которых одним выводом подключены к клемме напряжения питания, а другим - с соответствующим входом блока 3.
Устройство работает следующим образом.
В процессе обработки детали с помощью датчика 6 и счетчика 9 осуществляется контроль пути, пройденный инструментальным суппортом. Информация о текущем радиусе обработки вырабатывается в виде элементарных приращений (импульсов) и накапливается счетчиком 9, при этом текущее значение кода NR счетчика 9 соответствует радиусу обработки детали.
Датчик 6 связан с ходовым винтом суппорта. При перемещении суппорта на выходах датчика вырабатываются импульсы, сдвинутые относительно друг друга на 90°. В зависимости от направления движения, по порядку чередования сигналов с датчика импульсные последовательности формируются на выходе одного из каналов блока 7. В свою очередь канал прохождения импульсов на входы счетчика 9 определяется блоком 8. Независимо от направления вращения ходового винта суппорта при движении к центру изделия импульсы с датчика поступают на вычитающий вход счетчика 9, при движении от центра - на суммирующий вход. Коммутация направлений счета импульсов осуществляется в момент перехода счетчика 9 через нулевое состояние с помощью блока 8. Это позволяет осуществить абсолютный отсчет относительно центра изделия. При поступлении очередного импульса с выходов блока 8 код счетчика NR перезаписывается в буферный регистр 12. Процесс записи в регистр 12 осуществляется по переднему фронту и изменение состояния счетчика 9 по заднему фронту импульса. Объединение двух импульсных последовательностей, поступающих на синхронизующий вход регистра 12 через элемент И 11, осуществляется элементом ИЛИ 10.
Скорость шпинделя регулируется с помощью автоматической коробки скоростей путем ступенчатого изменения коэффициента передачи между шпинделем и двигателем, а также электроприводом, осуществляющим плавное регулирование скорости шпинделя на интервалах работы ступеней коробки.
Изменение угловой скорости ω шпинделя осуществляется в соответствии с гиперболической зависимостью
 ,
,
где V - скорость резания;
R - радиус обработки детали.
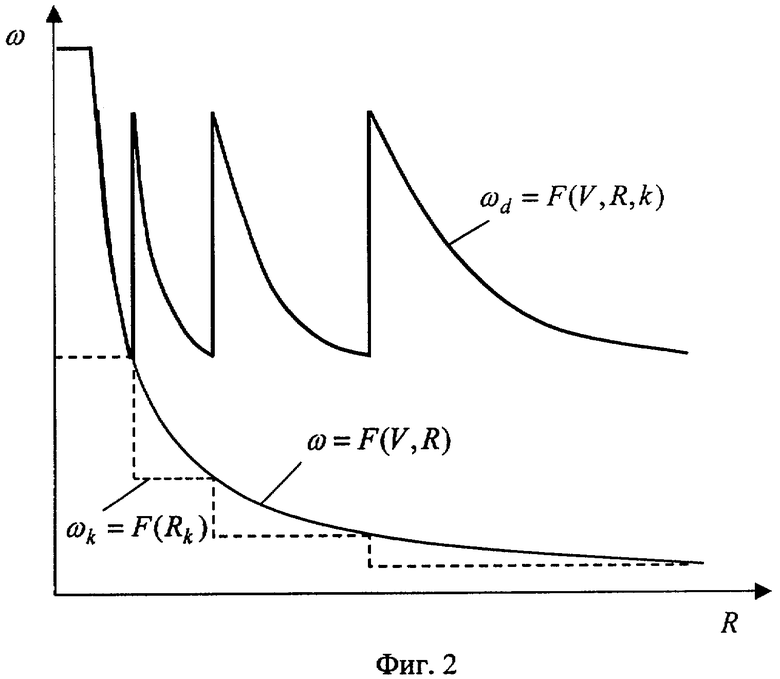
Данная гиперболическая зависимость (фиг.2) формируется с помощью широтно-импульсного модулятора (ШИМ модулятора) МК, низкочастотных фильтров 15 и 16, сумматора 17 и усилителя 18.
Значение скорости резания определяется величиной аналогового сигнала с задатчика 4, который с помощью аналого-цифрового преобразователя МК преобразуется в код NV. Код NR, соответствующий радиусу обработки, считывается с регистра 12. Чтение осуществляется по упрошенной схеме без использования регистра адреса и дешифратора. Альтернативные выводы (AD) одного из портов МК представляют собой мультиплексную шину адресов-данных, а другого порта МК - старшие разряды (А8…А15) шины адреса. Старшие разряды шины адреса используются в качестве селектирующих сигналов и поступают на шинные драйверы 13 и 14. Чтение младшего и старшего байта регистра 12 и запись содержимого в буферные ячейки памяти МК осуществляется последовательно по сигналу WR. На время чтения запись в регистр 12 блокируется путем предварительного перевода в нулевое состояние сигнала на линии Ро2 дискретного порта. Цикл выполнения основной подпрограммы включает в себя следующие основные операции:
1) сравнение текущего кода NR с фиксированными кодами Nk, и формирование кода номера ступени (k=1,2,3,…) коробки скоростей с последующей выводом кода на линии Ро5…Po(5+k-1) порта МК;
2) формирование кода скорости путем операции целочисленного деления Nω=NV/NR=Nωent+Nωrst c формированием целой части Nωent и остатка Nωrst;
3) перегрузку полученных кодов Nωent и Nωrst в регистры данных широтно-импульсного модулятора.
На выходах PWM1, PWM2 широтно-импульсного модулятора МК при этом формируются сигналы, скважность которых пропорциональна составляющим кода скорости шпинделя. При этом на выходе фильтров 15 и 16 средние значения напряжений будут равны:
 ,
,
 ,
,
где U - напряжение питания;
n - разрядность опорного счетчика модулятора.
Данные напряжения поступают на сумматор 17, где формируется напряжение пропорциональное частоте вращения шпинделя
Uω=k1(Uω1+k2Uω2),
где k1 - общий коэффициент усиления;
k2=1/2n - коэффициент приведения остатка к весу младшего разряда целой части.
Для устранения влияния исполнительных устройств коробки передач на МК и согласование уровней управления используется гальваническая развязка, реализуемая с помощью блока 27. При изменении состояния выходных сигналов Po5…Po(5+k-1) одновременно с переключением ступеней коробки 25 происходит изменение коэффициента передачи в цепи задания скорости регулируемого электропривода. При этом коэффициент передачи усилителя 18 изменяется обратно пропорционально коэффициенту передачи между шпинделем и двигателем с тем, чтобы сохранить гиперболический закон изменения скорости шпинделя в момент переключения.
С помощью привода 20, включающего в себя регулятор 21, усилитель 22, двигатель 23 и датчик 24, сигнал с которого в виде отрицательной обратной связи поступает на второй вход регулятора 21, осуществляется плавное регулирование скорости шпинделя на интервалах работы ступеней коробки 25. Характеристика изменения скорости двигателя ωd=F(V,R,k) показана на фиг.2, там же приведена кривая ступенчатого регулирования скорости ωk=F(Rk), осуществляемая с помощью коробки скоростей, и результирующая кривая скорости вращения шпинделя ω=F(V,R).
Кривая ωk=F(Rk) соответствует регулированию скорости шпинделя только за счет коробки передач при постоянной скорости двигателя, равной ее минимальному значению на интервалах регулирования. Отношения коэффициентов для смежных ступеней коробки передач целесообразно принять равными, т.е. выбирать передаточные числа механической передачи в соответствии с геометрической прогрессией. При этом максимальные и минимальные значения скорости двигателя на интервалах регулирования соответствуют одним и тем же значениям.
Инициализация периферийных устройств МК происходит при включении питания. По сигналу сброса (Reset) МК переходит на начальный вектор запуска, а затем на программу его обслуживания, включающей этап инициализации периферийных устройств МК и замкнутый цикл, на котором производится ввод и анализ информации с задатчика режимов работы и отработка основной подпрограммы. На этапе инициализации выполняются следующие основные операции:
установка регистров управления дискретными портами МК в состояние, определяющей работу линий порта на ввод или вывод в соответствии с выбранной конфигурацией;
загрузка в регистр управления МК признака разрешения внешнего статического ОЗУ, по которому выводы AD7:0, А15:8, ALE, WR и RD выполняют свои альтернативные функции интерфейса внешней памяти;
загрузка в регистры управления АЦП признаков, определяющих канал по которому производится подключение задатчика скорости резания, выбор источника опорного напряжения, однополярный режим работы входа, режим преобразования;
загрузка в регистры управления таймера/счетчика признаков определяющих внутренний тактовый источник, коэффициент предделителя, режим работы ШИМ, режим формирования выходного сигнала на альтернативных выводах PWM1, PWM2 порта;
загрузка в регистры управления универсального синхронно-асинхронного приемопередатчика (УСАПП) признаков, определяющих формат и скорость передачи.
С помощью переключателя 28 задается режим работы устройства: автоматический или автономный. В автономном режиме формирование кода NV осуществляется с помощью АЦП, а в автоматическом поступает от ведущего устройства, в качестве которого может быть использовано устройство числового программного управления. В последнем случае пакет передаваемой информации определяется выбранным протоколом и содержит адрес ведомого устройства и данные, определяющие работу привода. С помощью переключателя 29 задается направление вращения привода. В зависимости от его положения МК формируют сигнал на управляющий вход переключателя 19, по которому производят подключение прямого или инверсного сигнала с выхода усилителя 18 на вход регулятора 21. При нажатии на кнопку 30 (Пуск) формируется ветвь решения, по которой происходит выход на работу по основной подпрограмме. Завершение работы осуществляется нажатием на кнопку 31 (Стоп). При этом работа ШИМ модулятора МК блокируется путем перевода выходов PWM1, PWM2 в нулевое состояние. С целью повышения быстродействия отработка сигнала с датчика 32 осуществляется по прерываниям. При срабатывании датчика 32 МК по шине адресов/данных производит запись первоначальной уставки в регистр 15. Код уставки пропорционален расстоянию режущей кромки инструмента относительно центра детали. После записи уставки на выходе Ро3 микроконтроллера формируется сигнал, по которому код регистра 15 перезаписывается в счетчик 9. В процессе работы цикл выполнения программы включает операции сохранения текущего кода в энергонезависимой памяти EEPROM. При включении питания МК на этапе инициализации производится запись данного кода в регистр 15, который затем по сигналу на линии Ро3 перезагружается в счетчика 9 радиуса. Это позволяет избежать операций перевода суппорта в положение первоначальной установки.
Использование МК позволяет существенно повысить функциональные возможности устройства управления. Например, за счет вывода текущей информации о радиусе обработки и частоте вращения шпинделя на индикаторную панель. В последнем случае достаточно использовать дополнительный канал АЦП МК для подключения датчика скорости.
Использование двигателя по моменту в комбинированном приводе более рациональное, так как автоматическая коробка скоростей позволяет формировать нагрузочную характеристику, увеличивающую допустимый момент на шпинделе внизу диапазона регулирования скорости.
Таким образом, вышеизложенные сведения свидетельствует о выполнении при использовании заявленного устройства следующей совокупности условий:
- существенные признаки, характеризующие сущность изобретения, в принципе, могут быть многократно использованы при различных вариантах исполнения главного привода станка, например при управлении скоростью шпинделя только со стороны автоматической коробки скоростей;
- для реализации устройства могут быть использованы 8-разрядные микроконтроллеры общепромышленного применения;
- область применения устройства не ограничивается универсальными станками, для станков с программным управлением устройство может быть использовано как специализированный контроллер управления главным приводом;
- введение предлагаемого устройства в станок позволяет сократить машинное время обработки и повысить качество обработки изделий.
Следовательно, заявленное изобретение соответствует условию «Промышленная применимость».
Источники информации
1. Авторское свидетельство СССР №947830, кл. В23В 19/33, 1980.
2. Авторское свидетельство СССР №970322, кл. G05В 19/33, 1982 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления станком | 1981 |
|
SU970322A1 |
| Распределенная система управления | 1989 |
|
SU1732345A1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ИЗМЕРИТЕЛЕЙ ЧАСТОТЫ И ПЕРИОДА | 2009 |
|
RU2392633C1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| РЕГИСТРАТОР АВАРИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ЭНЕРГОСИСТЕМ | 2009 |
|
RU2402067C1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для измерения мощности резания | 1989 |
|
SU1739220A2 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2008 |
|
RU2381549C2 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1991 |
|
SU1807516A1 |
Изобретение относится к системам автоматического управления металлорежущими станками, в частности, предназначено для регулирования скорости главного привода. Технический результат заключается в повышении быстродействия и допустимого момента нагрузки на валу двигателя привода главного движения. Он достигается тем, что предложено устройство управления станком, содержащее главный привод, задатчик скорости резания, импульсный датчик, двухканальный формирователь импульсных последовательностей, блок реверса, реверсивный счетчик, буферный регистр, усилитель с переменным коэффициентом передачи, переключатель, микроконтроллер, задатчик режимов работы, первый блок гальванической развязки, драйвер последовательного интерфейса, регистр данных, элемент И, элемент ИЛИ, первый и второй шинный драйверы, первый и второй низкочастотный фильтры, сумматор, второй блок гальванической развязки. 2 ил.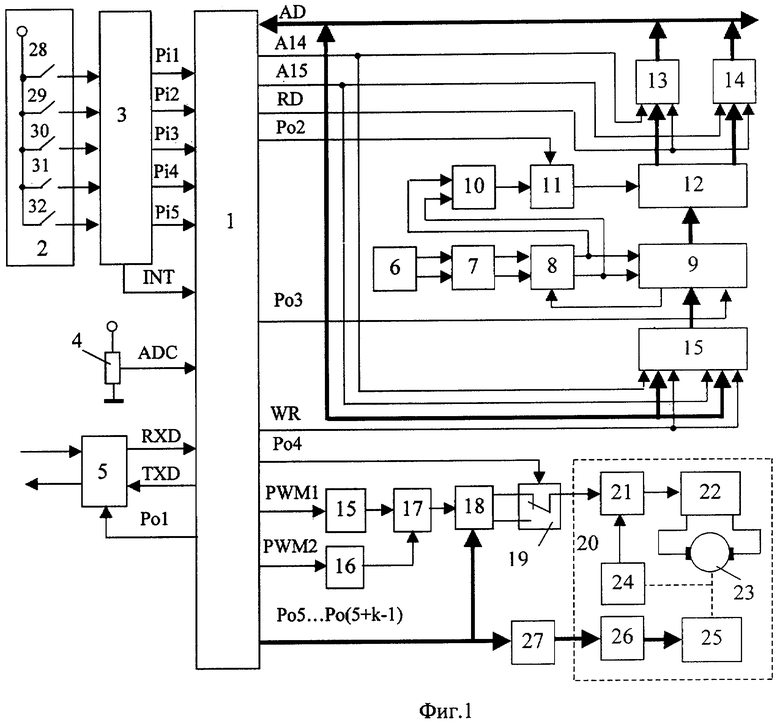
Устройство управления станком, содержащее главный привод, включающий в себя регулируемый электропривод с регулятором скорости и автоматическую коробку скоростей, электромагнитные муфты которой подключены к силовому блоку управления, задатчик скорости резания, последовательно соединенные импульсный датчик, двухканальный формирователь импульсных последовательностей, блок реверса, два выхода которого подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика, установочные входы которого соединены с выходами буферного регистра, а выход нулевого состояния подключен к управляющему входу блока реверса, усилитель с переменным коэффициентом передачи, прямой и инверсный выходы которого через переключатель подключены к регулятору скорости главного привода станка, отличающееся тем, что введены микроконтроллер, задатчик режимов работы, выходы которого подключены через первый блок гальванической развязки с первыми дискретными входами и входом запроса прерывания микроконтроллера, драйвер последовательного интерфейса, информационный вход которого соединен с выходом передатчика, информационный выход - с входом приемника, а управляющий вход - с первым дискретным выходом микроконтроллера, регистр данных, информационные входы которого соединены с информационными выходами реверсивного счетчика, а синхронизирующий вход подключен через элемент И, элемент ИЛИ к двум выводам блока реверса, первый и второй шинный драйверы, соединенные входами соответственно с младшими и старшими разрядами регистра данных, а выходами совместно с первыми и вторыми информационными входами буферного регистра - с шиной адресов/данных микроконтроллера, первый и второй низкочастотный фильтры, входы которых соединены с выходами двух каналов широтно-импульсного модулятора микроконтроллера, а выходы с учетом их веса - через сумматор с аналоговым входом усилителя с переменным коэффициентом передачи, причем выход задатчика скорости резания соединен с входом аналого-цифрового преобразователя микроконтроллера, первый старший разряд шины адреса микроконтроллера подключен к входам селекции первого драйвера шины и младших разрядов буферного регистра, а второй старший разряд шины адреса - к входам селекции второго драйвера шины и старших разрядов буферного регистра, входы управления драйверов шины подключены к выходу чтения шины управления микроконтроллера, а входы синхронизации записи младших и старших разрядов буферного регистра - к выходу записи шины управления, второй вход элемента И подключен к второму выходу дискретного порта микроконтроллера, вход установки реверсивного счетчика соединен с третьим выходом дискретного порта микроконтроллера, вход управления переключателя соединен с четвертым выходом дискретного порта микроконтроллера, пятые выходы дискретного порта микроконтроллера, число которых равно числу ступеней, подключены к управляющим входам усилителя с переменным коэффициентом передачи и через второй блок гальванической развязки - к входам силового блока управления.
| Устройство для управления станком | 1981 |
|
SU970322A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| СИСТЕМА И СПОСОБ ПЕРЕДАЧИ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2005 |
|
RU2345398C2 |
| US 4236202 A, 25.11.1980. | |||

