1
Изобретение относится к мийотехнике.
Известны грейферные механизмы, содержащие качающуюся вокруг неподвижного пальца рамку с зубом и полками, контактирующими с кулачком и управляющими соответственно входом зуба в перфорацию пленки и перемещением его вдоль пленки.
Цель изобретения - устранить н-епрямолинейность рабочего участка траектории зуба.
Это достигается тем, что полки р,амки, управляющие входом зуба в перфорацию пленки, выполнены криволинейными; криволинейные полки рамки выполнены по дуге окружности, радиус которой равен расстоянию соответствующей полки до оси качания рамки при введенном в нерфорацию пленки зубе.
На фиг. 1 и 2 изображены схемы предлагаемого грейферного механизма.
Грейферный механизм состоит из грейферной рамки 1, кулачка 2 и жестко закрепленного пальца 3, помещенного в пазу 4. С кулачком 2 находятся в контакте полки 5 и б, необходи.мые для качания рамки 1 в вертикальном направлении, а также полки 7 и 8, управляющие входом зуба 9 грейферной рамки в перфорации пленки (не показаны).
Полки 7 и 8 (или одна из них, если замыкание рамки на кулачок осуществляется силовым способом) выполнены криволинейными. В частном случае, когда палец (ось качания)
3 рамки 1, зуб 9 и точка 10 касания рамки 1 кулачка 2 в ее среднем положении, показанном на рисунке, находятся на одной прямой АА, полки имеют дугообразную форму, концентричны и -их центр совпадает с пальцем (осью качания) 3 рамки, когда зуб 9 грейфера введен в перфорацию пленки. Радиус внутренней полки 7 равен
,
где / - межцентровое расстояние между пальцем 3 и осью 11 кулачка 2; г - малый радиус кулачка 2. Радиус внешней полки 8 равен
, где R - большой радиус кулачка 2.
При вращении кулачка 2 зуб 9 грейфера описывает траекторию «абвг, части которой «аб и «вг представляют собой дуги радиуса, равного расстоянию до пальца (оси качания) 3 рамки 1, и нормально расположенные к прямой АА. Величиной стрелки дуги «аб при достаточной длине рамки 1 можно пренебречь в ряде случаев.
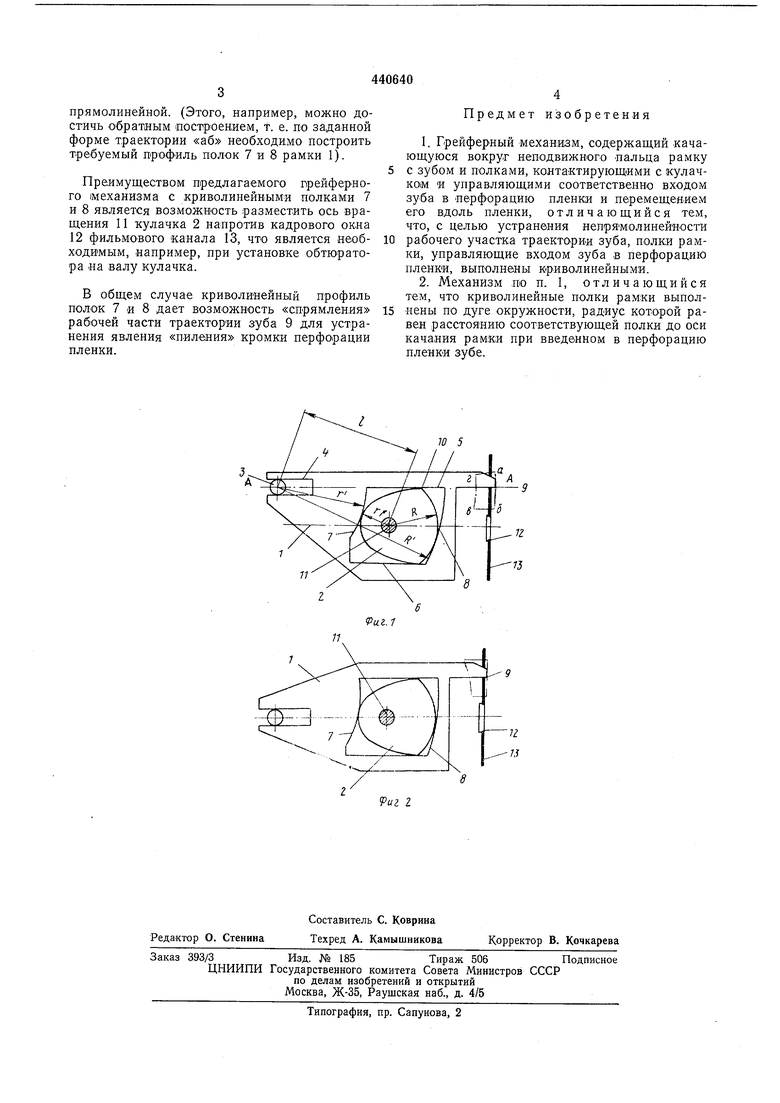
В более общем случае (см. фиг. 2) расположение пальца (оси качания) 3 рамки 1 и форма полок 7 и 8 выбираются такими, чтобы рабочая часть траектории «аб была бы
прямолинейной. (Этого, например, можно достичь обратным построением, т. е. по заданной форме траектории «аб необходимо построить требуемый проф-иль полок 7 и 8 рамки 1).
Преимуществом предлагаемого лрейферНого механизма с криволинейными полками 7 и 8 является возможность разместить ось вращения 11 кулачка 2 напротив кадрового окна 12 фильмового канала 13, что является необходимым, например, при установке обтюратора на валу кулачка.
В общем случае криволинейный профиль полок 7 и 8 дает возможность «спрямления рабочей части траектории зуба 9 для устранения явления «пиления кромки перфорации пленки.
Предмет и:зобретения
1.Грейферный механизм, содержащий качающуюся вокруг неподвижного пальца рамку с зубом и полками, контактирующими с кулачком И управляющими соответственно входом зуба в перфорацию пленки и перемещением его вдоль пленки, отличающийся тем, что, с целью устранения непрямолинейности рабочего участка траектории зуба, полки рамки, управляющие входом зуба в перфорацию пленкИ, выполнены криволинейными.
2.Механизм по п. 1, отличающийся тем, что криволинейные полки рамки выполнены по дуге окружности, радиус которой равен расстоянию соответствующей полки до оси качания рамки при введенном в перфорацию пленки зубе.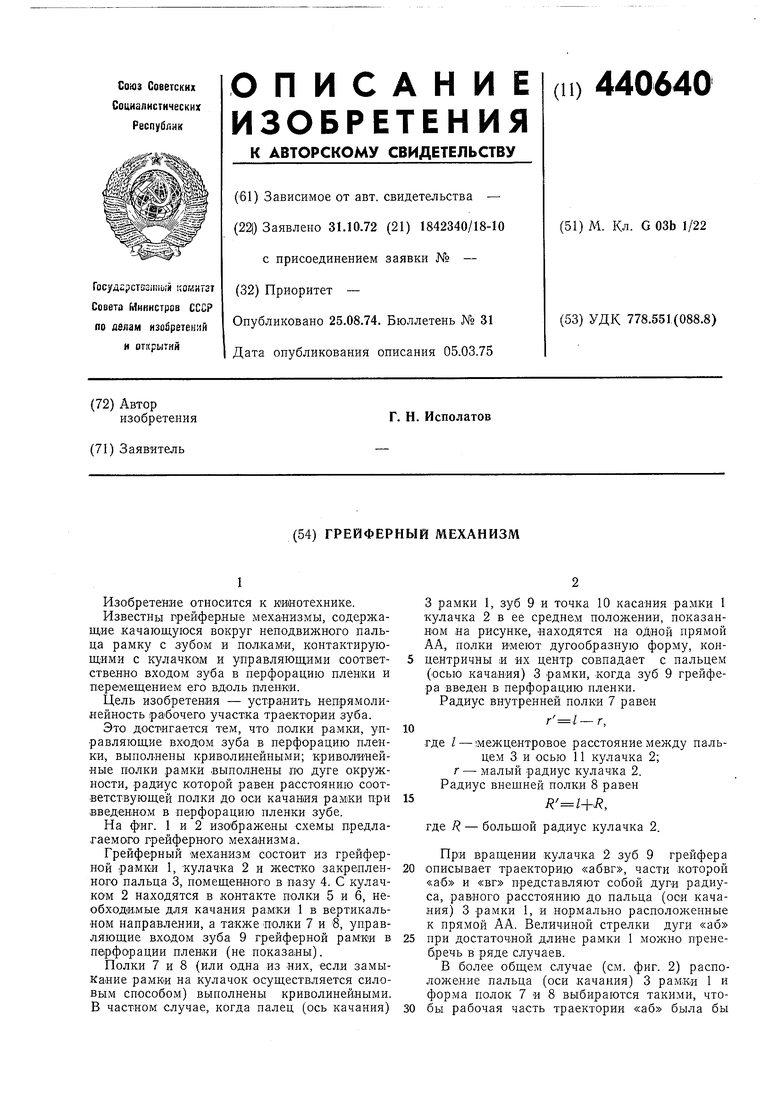
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для прерывистого перемещения кинопленки в киноаппарате | 1976 |
|
SU564619A1 |
| ПРЕРЫВИСТОГО ДВИЖЕНИЯ ПЛЕНКИ | 1969 |
|
SU240473A1 |
| Устройство для прерывистого перемещения пленки | 1980 |
|
SU935862A1 |
| Грейферный механизм | 1959 |
|
SU125473A1 |
| Механизм прерывистого перемещения кинопленки | 1975 |
|
SU530304A1 |
| ГРЕЙФЕРНЫЙ МЕХАНИЗМ ДЛЯ КИНОСЪЕМОЧНОГО АППАРАТА | 1934 |
|
SU41335A1 |
| КИНОПРОЕКТОР | 1972 |
|
SU427304A1 |
| ГРЕЙФЕРНЫЙ МЕХАНИЗМ ДЛЯ КИНО-СЪЕМОЧНОГО АППАРАТА | 1935 |
|
SU46129A1 |
| Грейферный механизм для кинопроектора | 1979 |
|
SU800947A1 |
| Грейферно-обтюраторный механизм | 1984 |
|
SU1269077A1 |
W 5
Риг г
