1
Известны устройства управления бесконтактными двигателями постоянного тока, содержащие мостовой коммутатор на транзисторах различной проводимости, датчик положения ротора с первым и вторым комплектами чувствительных элементов на магнитодиодах и реверсор.
Цель изобретения - уменьшение числа соединительных проводов между датчиком и коммутатором.
Для этого реверсор выполнен в виде транзисторного моста, в диагональ которого включены пары последовательно соединенных магнитодиодов, причем пары магнитодиодов первого и второго комплектов датчика включены встречно-параллельно, а точки соединения магнитодиодов пар разных комплектов объединены попарно и связаны каждая с базами двух транзисторов коммутатора.
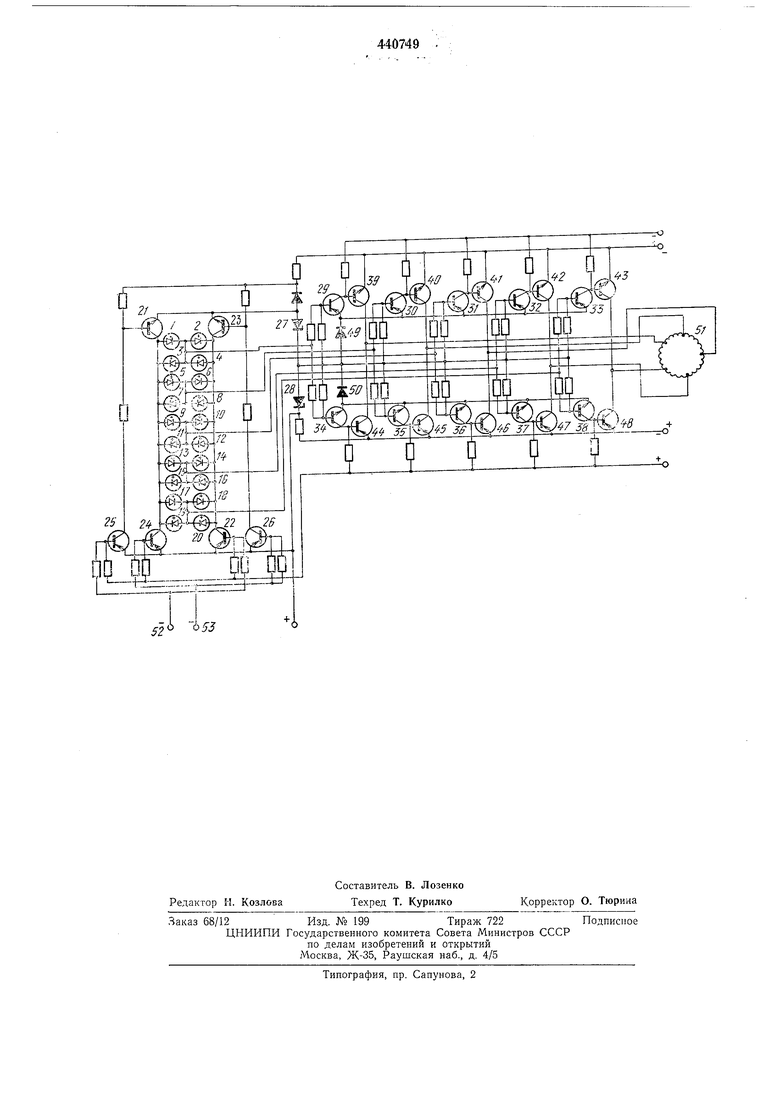
На чертеже показана схема устройства управления бесконтактным двигателем постоянного тока.
Устройство содержит датчик положения ротора с чувствительными элементами на магнитодиодах 1-20. Магнитодиоды соединены попарно-последовательно, например 1 и 2 с встречно-параллельным включением первого (1, 2, 5, 6, 9, 10, 13, 14, 17, 18) и второго (3, 4, 7, 8, 11, 12, 15, 16, 19, 20) .комплектов датчика. Параллельно соединенные пары магнитодиодов включены в диагональ моста на транзисто-рах 21-24, представляющего собой реле реверсора, имеющего управляющие транзисторы 25 и 26. Датчик положения ротора 5 и реле реверсора получают питание от стабилизатора на стабилитронах 27 и 28. Мостовой коммутатор, например пятифазный, выполнен на транзисторах 29-48. Транзисторы верхнего и нижнего плеч коммутатора имеют различную проводимость, например 39 и 44. В качестве предварительного усилительного каскада также использованы транзисторы различной проводимости, например 29 и 34. Нормальную работу транзисторов устройства
5 обеспечивают дополнительные источники и диоды 49 и 50. К выходу коммутатора подключена якорная обмотка 51. Базы транзисторов различной проводимости, например 29 и 34 объединены и подключены к паре цепо0 чек из двух магнитодиодов I, 2 и 3, 4 соответственно. Реверс двигателя обеспечивается по управляющим цепям 52 и 53. Устройство работает следующим образом. Допускают, что по управляющей цепи 53
5 подано напряжение указанной на чертеже полярности. В этом случае будут работать магнитодиоды 1, 2, 5, 6, 9, 10, 13, 14, 17, 18. При этом два или три из перечисленных диодов в зависимости от положения ротора двигателя
0 будут находиться вне действия магнитного
поля. Если вне действия магнитного поля находятся диоды 1 и 10, то падение напряжения на них окажется значительно ниже падения напряжения на диодах 2 и 9. Такое распределение напряжения между диодами приводит к тому, что транзисторы 34 и 44 и транзисторы 31 и 41 будут открыты и включат обмотку якоря. Все остальные транзисторы коммутатора будут закрыты за .счет падения напряжения на диодах 49 и 60 и вспомогательных источников. После поворота ротора двигателя на некоторый угол вне действия магнитного поля окажется магнитный диод 14 и включится транзистор 42. Ротор вращается за счет попеременного размагничивания магнитодиодов в порядке, необходимом для нормальной работы.
Подача напряжения по цепи 52 при обесточенной щепи 53 приводит к работе магнигодиодов 3, 4, 7, 8, 11, 12, 15, 16, 19, 20. В результате такого переключения изменяется порядок работы транзисторов коммутатора, что в свою очередь приводит к реверсированию направления вращения двигателя.
Получение оптимальной коммутации двигателя обеспечивается соответствующим размещением магнитодиодов. Число соединительных проводов между коммутатором и датчиком равно {т+2), где т - число секций двигателя.
Предмет изобретения
Устройство управления бесконтактным двигателем постоянного тока, содержащее мостовой коммутатор на транзисторах различной проводимости, датчик положения ротора с двумя комплектами чувствительных элементов на магнитодис дах и реверсор, отличающееся тем, что, с целью уменьшения числа соединительных проводов между датчиком и коммутатором, реверсор выполнен в виде транзисторного моста, в диагональ которого
включены пары последовательно соединенных магнитодиодов, причем пары магнитодиодов первого и второго комплектов датчика включены встречно-параллельно, а точки соединения магнитодиодов пар разных комплектов
объединены попарно и связаны каждая с базами двух транзисторов коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| ЭЛЕКТРОННЫЙ СТАБИЛИЗАТОР НАПРЯЖЕНИЯ | 1999 |
|
RU2140665C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2365025C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2075822C1 |
| КОММУТАТОР ДЛЯ БЕСКОНТАКТНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1972 |
|
SU357647A1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2075820C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076447C1 |
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |