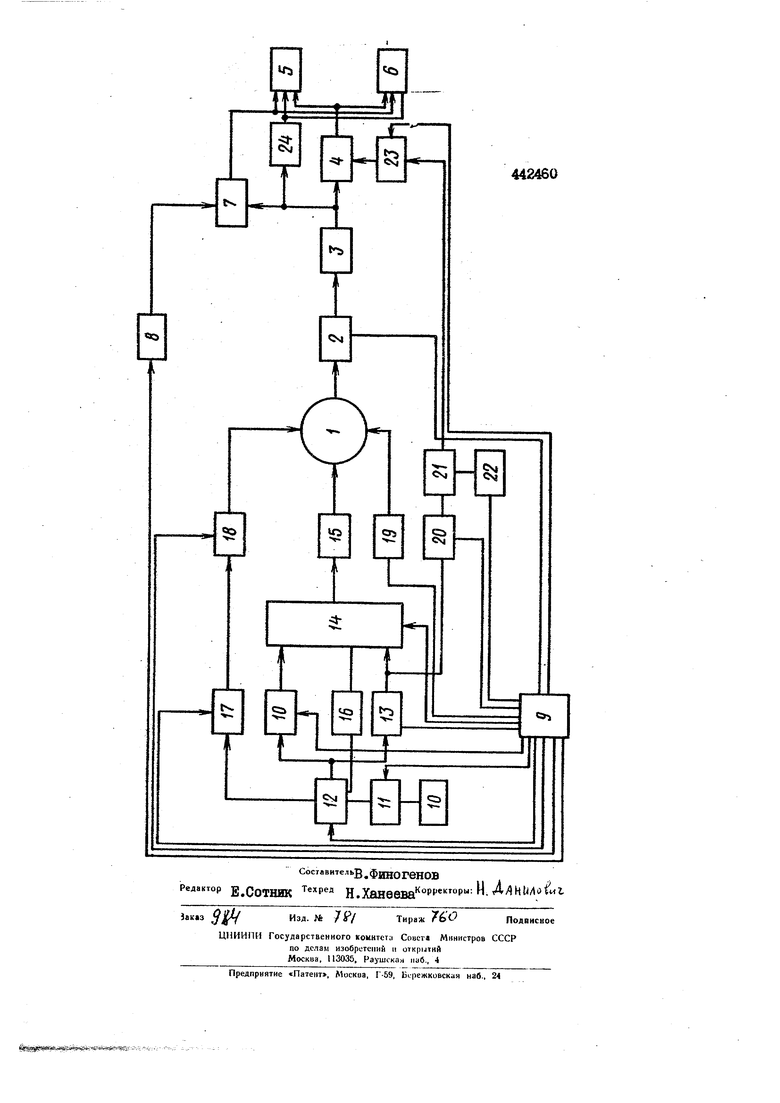
Изобретение относится н об ласти автоматики и вычислительной техники и может найти применен.1е при отборе, обучении и про верке операторов в контз/ре управ ления систем человек-машина, в том числе и водителей автотранспорта. Известная система автоматическопо контроля параметров опер тора в контуре управления, содер жащая генератор тактовых импульсов и ппограммно-уиравляющий бло соединенный с адресным устройством, которое через запоминающее устройство тестов подключено к задаюи1ему устройству с блоком датчи.сов, вход которого подсоединен н выходу блока органов управления, а выход - к первому входу измерителя времени, к входу компаратора преобразователя последовательности сигналов, выходы измерителя времени, преобразователя последовательности си(гнзлов И компарутора подключены к входам регистратора и индикатора, с датчиком временных интервалов, выход которого подсоединен ко второму входу измерителя времени, и с управляющим входом запоминающего устройства тестов. Предлагаемая система содержит последовательно соединенные управляемый делитель, кольцевой распределитель, дешифратор сигналов и индикатор у1фежда(01цих сигналов, управляющие входы кото рых связаны с программно-управляющим блоком, а вход управляемого целителя - с выходом генератора тактовых импульсов, генератор случайных чисел, вход которого подключен к входу адресного устройства и выходу кольцевого распределителя, а выход - к входу запоминающего устройства тестов, последовательно соединенные де.щифратор команд, преобразователь напряжения и блок временной задержки, управляющие входи дашифрз-го команд и блока временной задержки непосредственно, а входы преобразователя напряжений через зэдатчик диапазонов подключены к программно-управляющему блону, со единенному также с индикатором аварийных ситуаций, вход дешифратора команд подключен к выходу ад ресного устройства, а выход блока временной задержки - к компаратору Такое выполнение позволяет существенно повысить эффективность контроля параметров оператора в контуре управления систем человек-машина. На чертеже представлена блок-схема системы, В нее включены оператор I, органы управления 2 блок 5 датчиков, компаратор 4, регистратор 5, индикатор 6 аварий ных С/туаций, измеритель 7 времен датчик Н временных интервалов, программно-управляющий блок 9, ге нератор 10 тактовых импульсов, уп равляемый делитель II, кольцевой распределитель 12, адресноеустро ство 13, запоминающее устройство тестов, задающее устройство 15 генератор 16 случайных чисел, дешифратор 17 сигналов, индикатор 18 упреждающих сигналов, индикатор 19 аварийных ситуаций, дешифратор 20 команд, преобразователь dl напряжений, задатчик 22 диапаз нов, блок 23 временной задержки, преобрэзователь 24 последовательности сигналов. Работает система автоматического контроля следующим образом. Оператор I, характеристики которого определяются и исследуются, получает команды для исполнения от заданного устройства 15 и специальную информацию о счтуац циа от индикатора 18, 19 и затем осуществляет необходимые манипуляции с соответствующими органами управления 2. Результат этих манипуляций после преобразования в блоке 5 датчиков в напряжение поступает на компаратор 4, где сравнивается с эталонным сигналом соответствующим идеальной (или оп тимальной) реакции оператора для данной ситуации, поступающим о выхода блока 25. Результат сравнения реального и эталонного сигналов фиксируется регмстраторои 5 в индикатором б. Временные характеристики оператора I, например время реакции, контролируются с помощью измерителя 7 времени, где реальное время отработки сравнивается с соотвествующим эталонным, вырабатываемым датчиком 8 временных интервалов по программе, задаваемой программно-управляющим блоком 9. Результат контроля временных характеристик оператора 1, а также последовательность его действий, приведенная преобразователем Л последовательности сигналов а виДУ удрбрцу .для, регистрации фиксируютсяна индикаторе 6 и регистраторе 5. Работа всей системы синхронизируется генератором 10, импульсы с него через делитель II, управляемый блокам 9, поступает на кольцевой распределитель 12, сигналы с которого непосредственно задают частоту подачи команд оператору I. Набор всех возможных команд (тестов) хранится в запоминающем устройстве 1 (3 ) тестов . Команды (тесты) могут подаваться оператору I либо в виде стандартных наборов тестов (команд), либо в виде совершенна случайной последовательности команд (тестов). Первый режим обеспечивается подачей сигналов на выборку-тестов из ЗУ от адресного устройства 13, а необходим он для контроля действий оператора I в типовых ситуациях, для обучения и тренировки операторов оптимальных действиям в таких ситуациях. Второй режим служит для контроля реакций о пера тора Т на случайную последовательность лекоррелированных тестов, т.е. его поведения в непредсказуемых ситуациях, что необходимо, например, для ошбора операторов и обеспечивается он применением генератора 16 сл:/ чайных чисел для выборки тестов (команд) на ЗУ 14. Контроль параметров оператора I при работе в стрессовых ситуациях моделируется с помощью подачи сигналов экстремального характера, например световых и звуковых сигналов значительной интенсивности, от индикатора 19 аварийных ситуаций во время отработки оператором типовых или случайных тестовых наборов задаваемых устройством 15. Способность оператора к веро ятностному прогозированйю ситуаций и оптимальному поведению при наличии дополнительной информадии проверяется в режиме, когда подаются специальные, упреждающие очередную команду или набор ноузнд (тестов), сигналы от индикатора 1Я. Например, для водителе автотранспорта это может быть сиг нал; Опасная зона. В этом с промежуточного выхода кольцевого распределителя 12 сигнал поступает на дешифратор 17 сигналов, где в соответствии с программой с блока 9 определяется, какой име нно сигнал с индикатора 18 падает ся оператор I. Этот режим и режим с выдачей команд (тестов) от генератора 16 случайных чисел позволяет определить экстремальные значения параметров оператора I, т.е. состБетственно наилучшие и наихуд шие значения, орми5.ование эталонных сигналов, соответствующих идеальным реакциям оператора осуществляется с помощью дешифратора 20 команд, на который подается сигнал, поступающий одновременно и на выборку команды из ЗУ 14. Сигнал с выхода дешифратора 20 формир ется по величине и длительности преобразоватблем 21 напряжения, выбор диапазонов в котором производится задатчиком 22 диапазонов по программе от блока 9. Необходлман вре меннаь задержка, соответствующая времени реакции идеального оператора, осуществляется блоком 23 временной зпдегжки. Следует отметить, что данная система позволяет не только контролировать параметры оператора, но и эффективно обучать и тренировать операторов в широком диапазоне ситуаций. В этом случае программно-управляющий блок 9 функционально может включать в себя и человека-преподавателя. ПРЕДКЕТ ИЗОБРЕТЕНИЯ Система автоматического Контроля параметров оператора в контуре управления, содержащая генератор тактовых импульсов и программно-управляющий блок, соединенный с адресным устрой-ством, которое через запоминающее устройство тестов подключено к задающему устройству, с блоком датчиков, вход которого подсоединен к выходу блока орга-, нов управления, а выход - к первому входу измерителя времени, к выходу компаратора и преобразователя последовательности сигналов, выходы измерителя времени преобразователя последовательное ти сигналов и компараторов подключены к выходам регистратора и индикатора, с датчиком именных интервалов выход которого подсоединен ко второму входу измерителя времени, и с управляющим i входом запомлнащего устройства тестов, отличающееся тем, что, с целью повышения эффективности контроля она содержиД последовательно соединенные управляемый делитель, кольцевой распре дел гтиль, д-ми гррэтор сигналов и индикатор упреждающих сигналов, управляющие входы которых связаны с программно-управляющим блоком, а вход управляемого делителя - с входом генератора тактовых импульсов, генератор случайных числе, вход которого подключен к выходу адресного устройства и выходу кольцевого распределителя, а выход - к входу запоминающего устройства тестов, последовательно соединенные деши1ра тор команд преобразователь напряжения и блок временной задержки управляющие входы дешифратора команд и блока временной задержки непосредственно, а входы преобра78
зоватедей напряжения через датчиктуаций, вход дашйфратора команд диапазона подключены к программноподключен к выходу адресного усуправляющему блоку соединенномутройства, а выход блока временной также с индикаторов авврийнн си-задержка - к компаратору.
442460
соств вительв Фино генов Редактор Е.сотник Р д Ханввш - - .
т
. № /Р/Тираж 6С
Изд
)ак|3
ЦИИИПИ Государственного коинтста Совете Министров СССР по делам изобретений и открытки Москва, 113035, Раушская наб., 4
Предприятие «Патент, Москва, Г-59, bi-режковская наб., 24
442460
Подвисное
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ ОПЕРАТОРА В КОНТУРЕ УПРАВЛЕНИЯ | 1973 |
|
SU453674A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| Информационно-измерительное устройство | 1985 |
|
SU1256074A1 |
| Многоканальное устройство для регистрации и индикации аварийных ситуаций | 1990 |
|
SU1796907A1 |
| Устройство для программного управления технологическими процессами | 1979 |
|
SU877476A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
| Многоканальная система для анализа формы и регистрации аналоговых процессов | 1983 |
|
SU1149242A1 |
| Устройство для контроля | 1986 |
|
SU1363169A1 |
| Устройство для контроля параметров полупроводниковых приборов | 1978 |
|
SU781721A1 |