Изобретение относится к области автоматики и вычислительной техники и может найти применение при отборе, тренировке и контроле характеристик операторов - в контуре управления комплектов «человек - машина, например водителей автотранспорта.
Известна система автоматического контроля параметров оператора в контуре упра,вления, содержащая дешифратор-распределитель, соединенный с индикатором упреждаюш,их сигналов, индикатором аварийных ситуаций, генератором случайных чисел, адресным устройством, управляемым генератором импульсов и датчиком временных интервалов, запоминаюш,ее устройство, вход которого соединен с генератором случайных чисел и адресным устройством, а выход - с задаюшим индикатором, последовательно соединенные блок орга,нов управления, блок датчиков, ком1паратор и регистратор, анализатор последовательности реакций и измеритель временных интервалов, первые входы которых подключены к первому входу компаратора, вторые входы - ко второму его входу и через формирователь эталонных сигналов - к адресному устройству, а выходы - к регистратору, аналогоцифровой преобразователь, вход которого соединен с выходом компаратора, а выход - с соответствующим входом регистратора, и программно-управляющий блок, соединенный с
дещифратором-распределптелем, управляемым генератором импульсов, адресным устройством, запоминающим устройством, формирователем эталонных сигналов, блоком датчиков
и регистратором.
Система, выполненная согласно изобретению, отличается от известной тем, что содержит последовательно соединенные генератор щума, управляющий вход которого соединен
с дешифратором-распределителем, электромеханический преобразователь, другой вход которого соединен с выходом запоминающего устройства, и имитатор механических воздействий, вход которого через преобразователь
механических усилий соединен с выходом блока органов управления, преобразователь напряжений, вход которого соединен с другим входом компаратора, а выход - с задающим индикатором, решающее устройство, счетчик
сбоев и фиксирующий индикатор, причем рещающее устройство соединено непосредственно и через счетчик сбоев с фиксирующим индикатором, который также подключен к первому выходу датчика временных интервалов,
С анализатором последовательности реакций, с измерителем временных интервалов, с аналого-цифровым преобразователем, с регистратором, со вторым выходом датчика временных интервалов и программно-управляющим блоком, который также соединен с управляющими входами преобразователя механических усилий и преобразователя напряжений.
Это позволяет повысить эффективность контроля и достоверность получаемых данных.
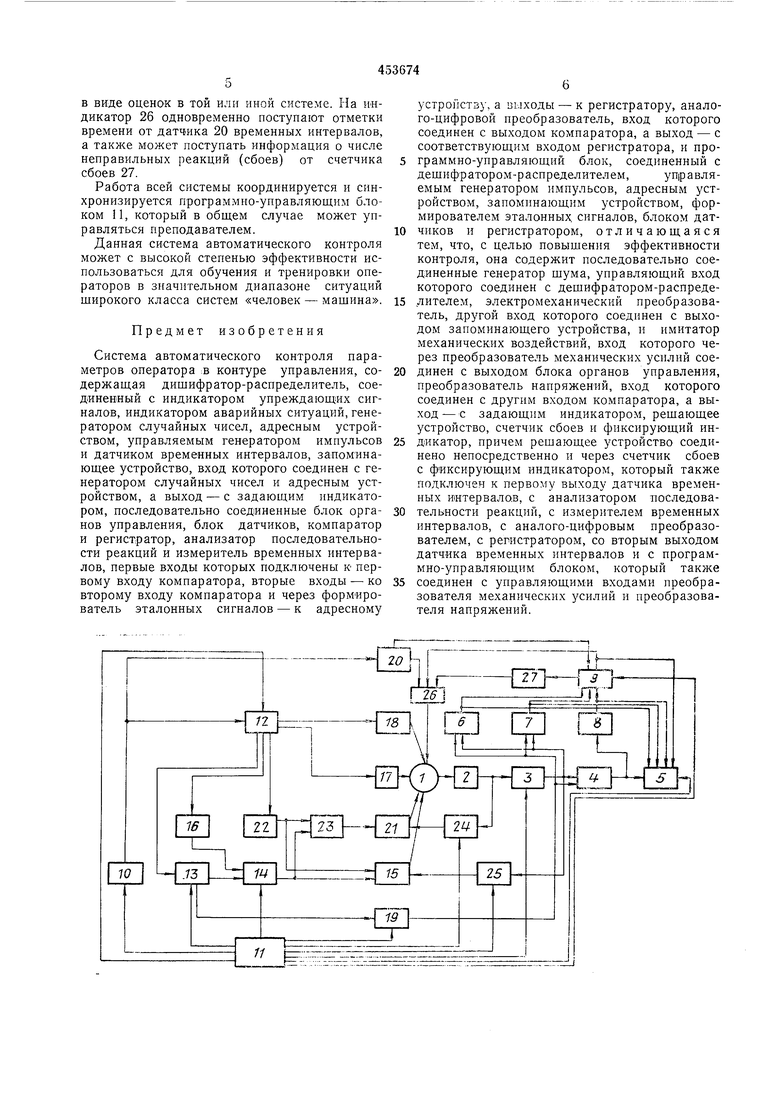
Блок-схема системы автоматического контроля оператора представлена на чертеже, где:
1 - оператор; 2 - блок органов управления; 3 - блок датчиков; 4 - компаратор; 5 - регистратор; 6 - анализатор последовательности реакций; 7 - измеритель временных интервалов; 8 - аналого-цифровой преобразователь; 9 - решающее устройство; 10 - управляемый генератор импульсов; 11-программно-управляющий блок; 12 - дещифратор-распределитель; 13- адресное устройство;
14- запоминающее устройство; 15 - задающий индикатор; 16 - генератор случайных чисел; 17 - индикатор аварийных ситуаций; 18 - индикатор упреждающих сигналов; 19- формирователь эталонных сигналов; 20 - датчик временных интервалов; 21-нмитатор механических воздействий; 22 - генератор щума; 23 - электромеханический преобразователь; 24 - преобразователь механических усилий; 25 - преобразователь напряжений; 26 - фиксирующий индикатор; 27 - счетчик сбоев.
Система автоматического контроля работает следующим образом.
Оператор 1, характеристики которого определяются и контролируются, получает команды для исполнения от задающего индикатора
15и специальную информацию о ситуации от индикаторов 17, 26, 18, имитатора 21 и затем осуществляет необходимые манипуляции с соответствующими органами управления блока 3. Результат этих действий после преобразования в блоке 3 датчиков в напряжение поступает на компаратор 4, анализатор 6 последовательности реакций оператора 1 и измеритель 7 В|ременных и«тервалов, в которых сравнивается с эталонным сигналом, соответствующим идеальной (или оптимальной) реакции оператора для данной ситуации, поступающим с формирователя 19 эталонных сигналов. Результат сравнения фиксируется регистратором 5 и, кроме того, подается в решающее устройство 9. Сигнал с выхода компаратора 4 предварительно преобразуют в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) 8.
Частота подачи команд оператору задается управляемым генератором импульсов 10, а определяется программно-управляющим блоком 11. Выбор режима работы осуществляет дешифратор-распределитель 12.
Набор всех возможных команд хранится в запоминающем устройстве (ЗУ) 14, а предъявляются они оператору 1 с помощью задающего индикатора 15.
Команды оператору 1 могут подаваться в виде типовых тестовых наборов, что соответствует большинству реальных ситуаций, когда оператор должен реагировать на целый ряд взаимно связанных типичных возмущений
(команд). В этом случае сигналы на выборку команд из ЗУ 14 поступают из адресного устройства 13.
В другом режиме оператору 1 подается последовательность команд, никак не связанных между собой, т. е. моделируется работа оператора в непредсказуемых ситуациях. В этом случае выбор команд из ЗУ 14 определяется генератором 16 случайных чисел.
Контроль параметров оператора 1 при работе в стрессовых ситуациях моделируется путем подачи сигналов экстремального характера, например световых и звуковых сигналов значительной интенсивности (или редкого вида), от индикатора 17 аварийных ситуаций.
Способность оператора 1 к адаптации и к вероятному прогнозированию ситуаций при наличии дополнительной избыточной информации контролируется в режиме, когда подаются специальные упреждающие очередную команду или набор команд сигналы с индикатора 18.
В реальной обстановке в большинстве случаев оператор имеет сигнал обратной связи, т. е. результат выполнения команды, что позволяет ему оптимизировать свои последующие действия.
Режим работы в таких ситуациях моделируется подачей сигналов обратной связи с выходом блока 2 органов управления и блока 3 датчиков. Их выходные сигна;1Ы, сформированные преобразователем 24 механических усилий и преобразователем 25 напряжений,
поступают соответственно на пмитатор 21 механических воздействий и задающий индикатор 15.
Наличие этих сигналов обратной связи позволяет существенно повысить достоверность
контроля оператора I в вышеописанных режимах, особенно это относится к режиму работы в аварийных ситуациях. В этом случае весьма эффективно с помощью имитатора 21 моделируются катастрофические отказы в
комплексе, звеном которого является оператор 1.
Достоверность получаемых данных повыщается также за счет введения генератора щума 22, выдающего сигналы на индикатор
15 и через электромеханический преобразователь 23 - на имитатор 21. Этот режим соответствует работе в реальной обстановке, т. е. при наличии мешающих факторов различной природы.
Наличие решающего устройства 9, производящего обработку в реальном масштабе времени всех данных, поступающих с АЦП 8, измерителя 7 и анализатора 6, позволяет контролировать способность оператора 1 к оптимизации своих действий, а адаптации и к обучению. Решающее устройство 9 непрерывно или в моменты времени, определяемые программно-управляющим блоком 11, выдает на фиксирующий индикатор 26 информацпЕО о
результатах действий оператора 1, например.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического контроля параметров оператора в контуре | 1973 |
|
SU442460A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ОПЕРАТОРСКОЙ ДЕЯТЕЛЬНОСТИ | 1997 |
|
RU2127547C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| ИЗМЕРИТЕЛЬ БАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ОРУЖИЯ | 2003 |
|
RU2240586C1 |
| Тренажер сварщика | 1986 |
|
SU1330649A1 |
| Устройство для контроля электрических параметров цифровых узлов | 1984 |
|
SU1260974A1 |
| Тренажер оператора автоматизированных систем управления | 1980 |
|
SU888173A1 |
| Устройство для отображения полутонового изображения на экране телевизионного приемника | 1988 |
|
SU1522273A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ | 2004 |
|
RU2279711C2 |
