Изобретение относится к области медицины и касается протезирования, в частности пневматических протезов руки.
Известные пневматические протезы руки, содержащие механизмы кисти и локтя, плечевой шарнир, редукционный клапан, блок управления, источник питания и несущую гильзу, характеризуются ограниченными функциональными возможностями.
Целью данного изобретения является создание такого пневматического протеза руки, который бы позволил расширить функциональные возможности протеза. Это достигается тем, что в предлагаемом протезе механизмы кисти и локтя выполнены в виде пневмоприводов одностороннего действия, а блок управления, выполненный в корпусе механизма локтя, жестко связан с источником питания и состоит из двух распределительных золотников, установленных с противоположных сторон корпуса блока, а между золотниками размещены друг против друга толкатели, кинематически связанные рычагами с распределительными золотниками и управляющим элементом. Кроме того, для повышения надежности эксплуатации целесообразно распределительные золотники блока управления при работе и снятии управляющего сигнала подпружинить сжатым газом с давлением, равным давлению в полости пневмопривода.
С целью обеспечения одновременной работы звеньев протеза и компактности его механизмы кисти и локтя, плечевой шарнир, блок управления, источник питания и редукционный
клапан объединены в единый блок, вмонтированный в несущую гильзу протеза.
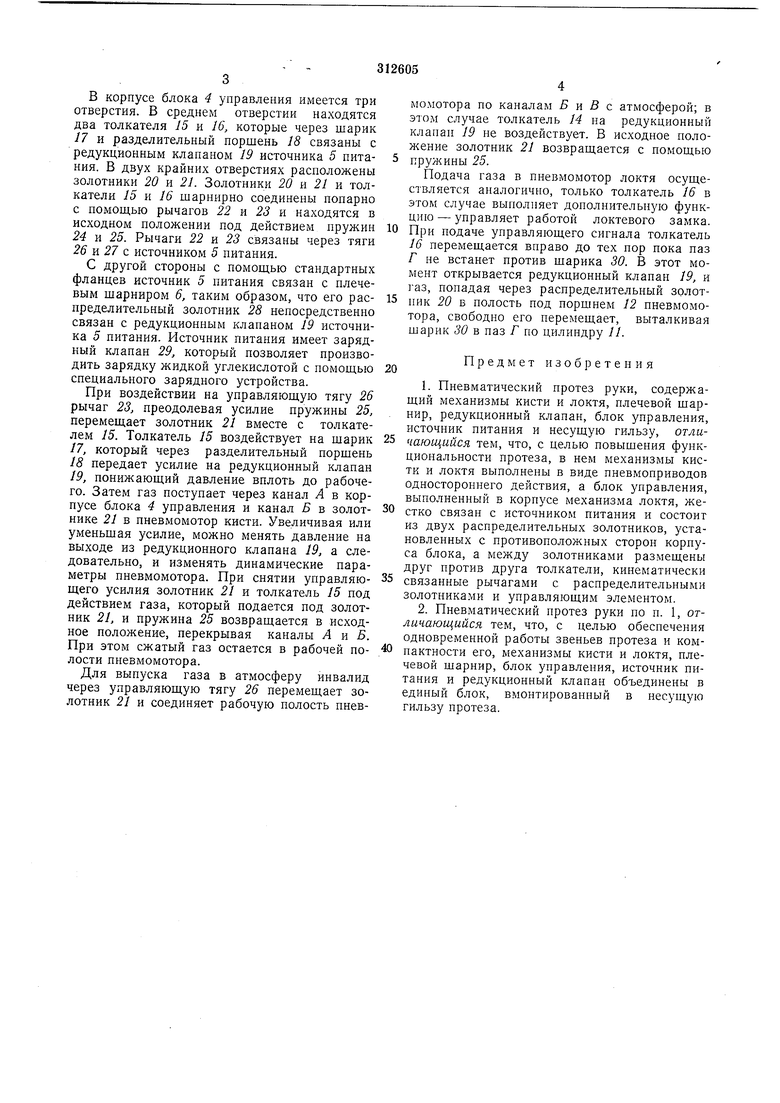
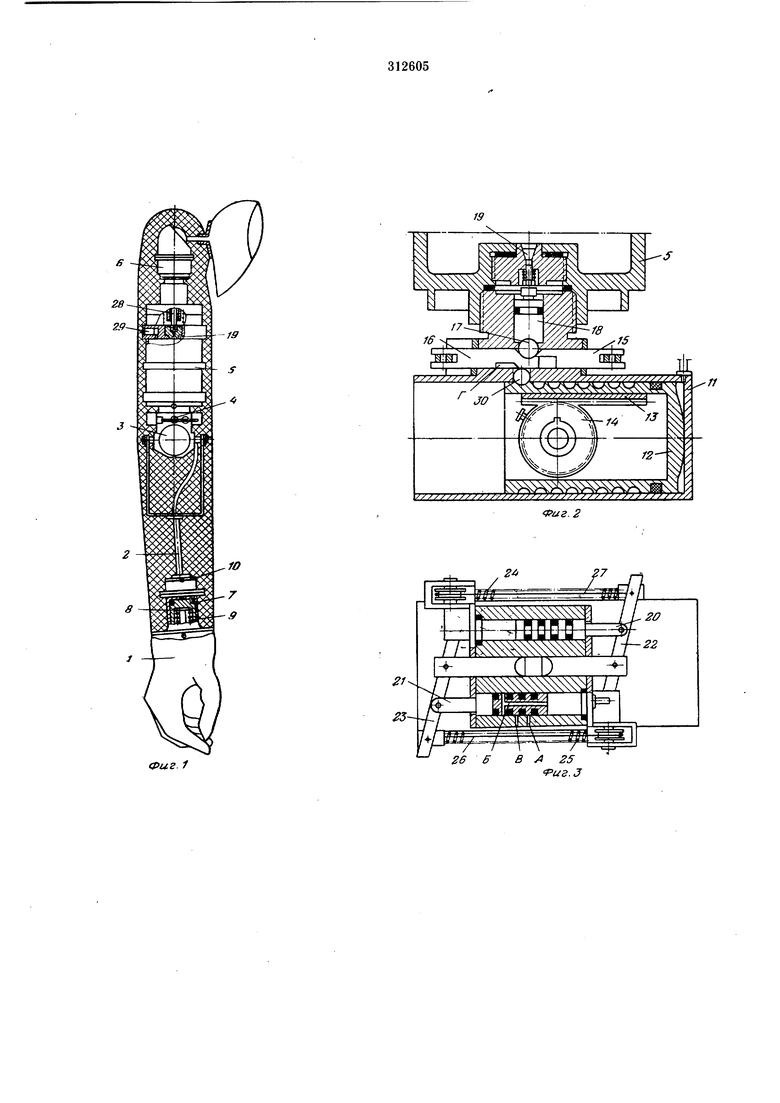
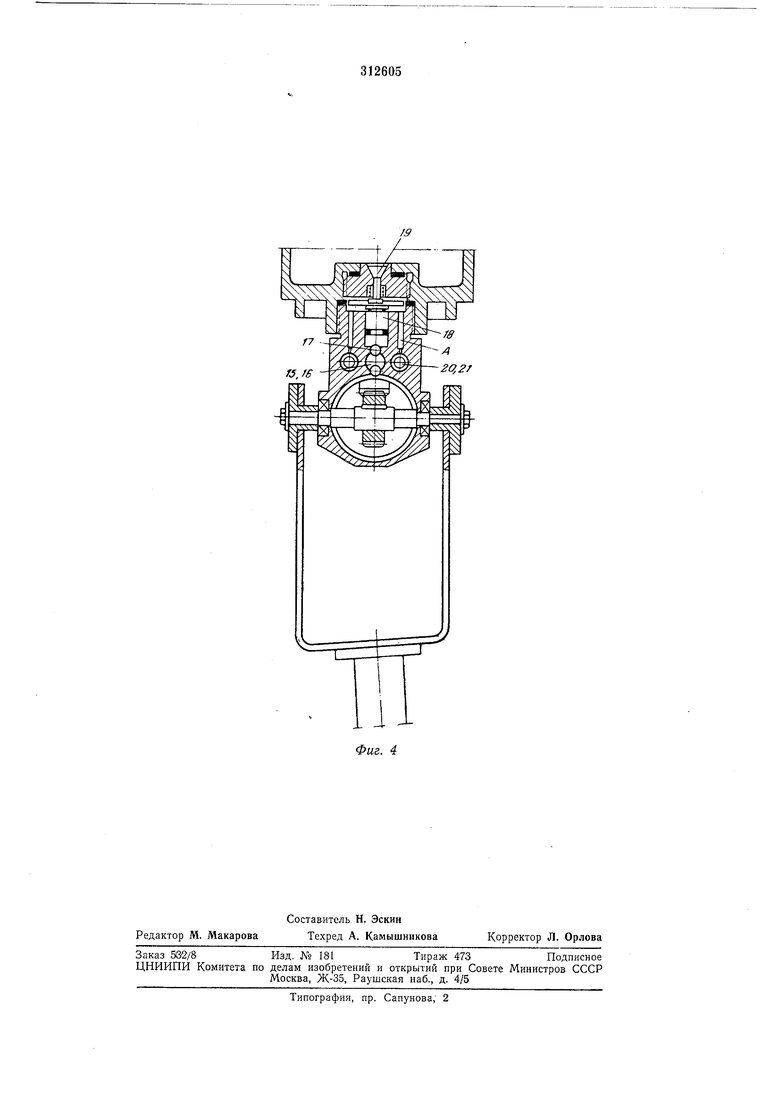
На фиг. 1 показан предложенный протез руки; на фиг. 2, 3 и 4 - отдельные узлы протеза.
Пневматический протез руки содержит механизм / кисти, предплечье 2, механизм 3 локтя, блок 4 управления, источник 5 питания и плечевой шарнир 6. Механизм 1 кисти выполнен в виде стандартной пластмассовой кисти, внутри которой расположен цилиндр 7 с поршнем 5. В обычном положении с помощью пружины 9 кисть закрыта. Механизм / кисти крепится к предплечью 2 с помощью ротационного кольца 10. Локтевой механизм 3 представляет собой цилиндр П с поршнем 12 пневмомотора, который соединен через зубчатую пару рейка 13 - колесо 14 с предплечьем 2. В поршне 12 пневмомотора предусмотрено восемь
5 кольцевых проточек для фиксации предплечья 2. В корпусе блока 4 управления имеется три отверстия. В среднем отверстии находятся два толкателя 15 и 16, которые через шарик 17 и разделительный поршень 18 связаны с редукционным клапаном 19 источника 5 питания. В двух крайних отверстиях расположены золотники 20 и 21. Золотники 20 и 21 и толкатели 15 и 16 шарнирно соединены попарно с помощью рычагов 22 -л 23 л находятся в исходном положении под действием пружип 24 и 25. Рычаги 22 и 23 связаны через тяги 26 и 27 с источником 5 питания. С другой стороны с помощью стандартных фланцев источник 5 питания связан с плечевым щарниром 6, таким образом, что его распределительный золотник 28 непосредственно связан с редукционным клапаном 19 источника 5 питания. Источник питания имеет зарядный клапан 29, который позволяет производить зарядку жидкой углекислотой с помощью специального зарядного устройства. При воздействии на управляющую тягу 26 рычаг 23, преодолевая усилие пружины 25, перемещает золотник 21 вместе с толкателем 15. Толкатель 15 воздействует на шарик 17, который через разделительный поршень 18 передает усилие на редукционный клапан 19, понижающий давление вплоть до рабочего. Затем газ поступает через канал А в корпусе блока 4 управления и канал Б в золотнике 21 в пневмомотор кисти. Увеличивая или уменьшая усилие, можно менять давление на выходе из редукционного клапана 19, а еледовательно, и изменять динамические параметры пневмомотора. При снятии управляющего усилия золотник 21 и толкатель 15 под деиствием газа, который подается под золотник 21, и пружина 25 возвращается в исходное положение, перекрывая каналы А и Б. При этом сжатый газ остается в рабочей полости пневмомотора. Для выпуска газа в атмосферу инвалид через управляющую тягу 26 перемещает золотник 21 и соединяет рабочую полость пневмомотора по каналам Б и В с атмосферой; в этом случае толкатель 14 на редукционный клапан J9 не воздействует. В исходное положение золотник 21 возвращается с помощью пружины 25. Подача газа в пневмомотор локтя осуществляется аналогично, только толкатель 16 в этом случае выполняет дополнительную функцию- управляет работой локтевого замка, При подаче управляющего сигнала толкатель б перемещается вправо до тех пор пока паз г не встанет против щарика 30. В этот момент открывается редукционный кланан 19, и j-аз, попадая через распределительный золот„ик 20 в полость под поршнем 12 пневмомотора, свободно его перемещает, выталкивая шарик 30 в паз Г по цилиндру 11. Предмет изобретения 1. Пневматический протез руки, содержащий механизмы кисти и локтя, плечевой шарнир, редукционный клапан, блок управления, источник питания и несущую гильзу, отличающийся тем, что, с повышения функциональности протеза, в нем механизмы кисти и локтя выполнены в виде пневмоприводов одностороннего действия, а блок управления, выполненный в корпусе механизма локтя, жестко связан с источником питания и состоит из двух распределительных золотников, установленных с противоположных сторон корпуса блока, а между золотниками размещены друг против друга толкатели, кинематически связанные рычагами с распределительными золотника.ми и управляющим элементом. 2. Пневматический протез руки по п. 1, отличающийся тем, что, с целью обеспечения одновременной работы звеньев протеза и компактности его, механизмы кисти и локтя, плечевой шарнир, блок управления, источник питания и редукционный клапан объединены в единый блок, вмонтированный в несущую гильзу протеза.
Фиг. 1
1
Jt
.f,,./,Al
//
.
)
Фиг. 2
2
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| Пневматический протез руки | 1973 |
|
SU445429A1 |
| Пневматический протез руки | 1974 |
|
SU520105A1 |
| Искусственная механическая рука | 1945 |
|
SU67476A1 |
| Протез руки | 1977 |
|
SU610522A1 |
| Многофункциональный активный протез руки | 1984 |
|
SU1223906A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Механизм локтевого шарнира протеза плеча | 1981 |
|
SU995779A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
Фиг. 4
