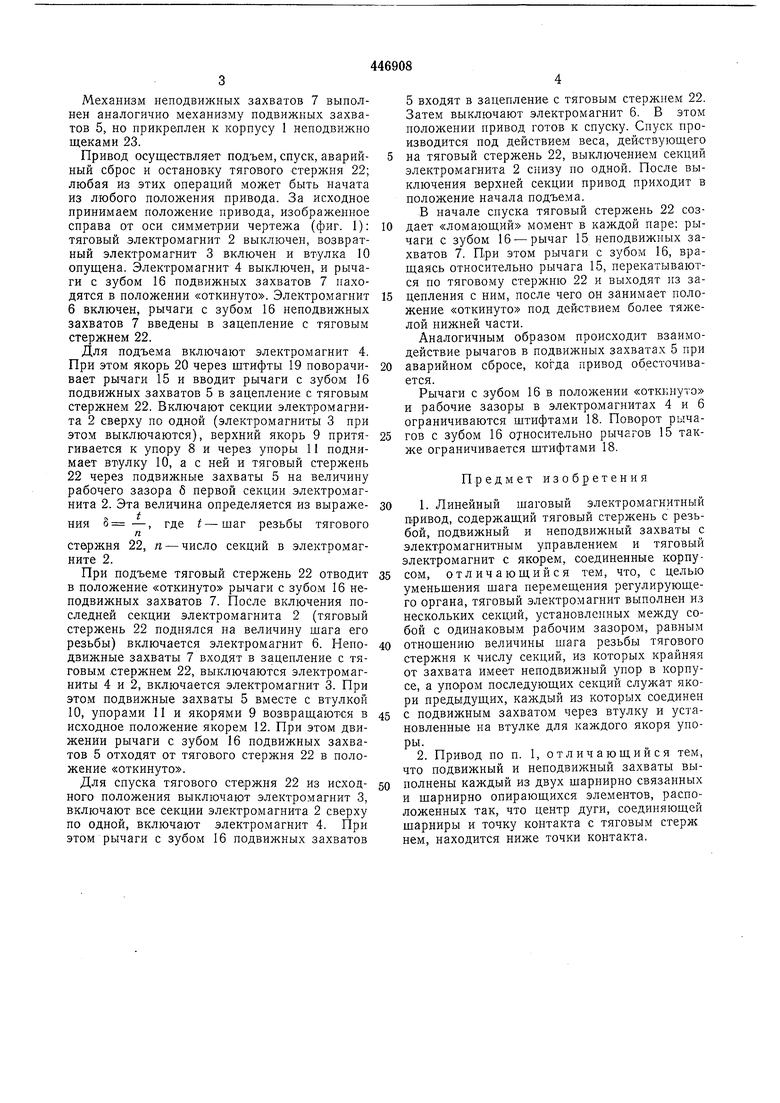
Изобретение относится к системам управления и защиты ядерных реакторов. Известен линейный шаговый электромагнитный привод, содержащий тяговый стержень с резьбой, подвижный и неподвижный захваты с электромагнитным управлением и тяговый электромагнит с якорем, соединенные корпусом. Известный привод имеет шаг электромагнита, равный шагу резьбы тягового стержня, причем величина шага резьбы ограничена условиями прочности. Для уменьшения шага неремещения регулирующего органа в предлагаемом приводе тяговый электромагнит выполнен из нескольких секций, установленных между собой с одинаковым рабочим зазором, равным отношению шага резьбы тягового стержня к числу секций, из которых крайняя от захвата имеет неподвижный упор в корпусе, а упором последующих секций служат якори предыдущих, каждый из которых соединен с неподвижным захватом через втулку и установленные на втулке для каждого якоря упоры. Подвижный и неподвижный захваты могу г быть выполнены каждый из двух шарнирно связанных и шарнирно опирающихся элементов, расположенных так, что центр дуги, соединяющей шарниры и точку контакта с тяговым стержнем, находится ниже точки кочтакта. На фиг. 1 изображен общий вид предлагаемого привода; на фиг. 2 - захваты (подвижный и неподвижный) в увеличенном масштабе. На корпус 1 снаружи надеты электромагниты: 2 - тяговый, состоящий из нескольких секций, 3 - возвратный, 4 - управления подвижными захватами 5, 6 - управления неподвижными захватами 7. Внутри корпуса размещены остальные детали привода. В верхней части неподвижно к корпусу крепят упор 8, под ним находятся якори 9 тягового электромагнита 2. Эти якори скользят по втулке 10, имеющей упоры П. На втулку 10 надет якорь 12 возвратного электромагнита 3, упором для которого служит кольцо 13, неподвижно нрикрепленное к корпусу 1. Подвижные захваты 5 крепят к втулке 10 и якорю 12 с помощью щек 14 (фиг. 2) и они состоят из шарнирно соединенных рычагов 15 и рычагов с зубом 16, а также ограничительных штифтов 17 и 18. Рычаги 15 с помощью штифтов 19 входят в зацепление с якорем 20 электромагнита 4. Кольцо 21, охватывающее щеки 14, служит подвижным упором электромагнита 4. Рычаги с зубом 16 входят в зацепление с шаговым стержнем 22.
Механизм неподвижных захватов 7 выполнен аналогично механизму подвижных захватов 5, но прикреплен к корпусу 1 неподвижно щеками 23.
Привод осуществляет подъем, спуск, аварийный сброс и остановку тягового стержня 22; любая из этих операций может быть начата из любого положения привода. За исходное принимаем положение привода, изображенное справа от оси симметрии чертежа (фиг. 1): тяговый электромагнит 2 выключен, возвратный электромагнит 3 включен и втулка 10 опущена. Электромагнит 4 выключен, и рычаги с зубом 16 подвижных захватов 7 находятся в положении «откинуто. Электромагнит 6 включен, рычаги с зубом 16 неподвижных захватов 7 введены в зацепление с тяговым стержнем 22.
Для подъема включают электромагнит 4. При этом якорь 20 через штифты 19 поворачивает рычаги 15 и вводит рычаги с зубом 16 подвижных захватов 5 в зацепление с тяговым стержнем 22. Включают секции электромагнита 2 сверху по одной (электромагниты 3 при этом выключаются), верхний якорь 9 притягивается к упору 8 и через упоры 11 поднимает втулку 10, а с ней и тяговый стержень 22 через подвижные захваты 5 на величину рабочего зазора б первой секции электромагнита 2. Эта величина определяется из выражения 8 -, где t-шаг резьбы тягового п
стержня 22, п - число секций в электромагните 2.
При подъеме тяговый стержень 22 отводит в положение «откинуто рычаги с зубом 16 неподвижных захватов 7. После включения последней секции электромагнита 2 (тяговый стержень 22 поднялся на величину шага его резьбы) включается электромагнит 6. Неподвижные захваты 7 входят в зацепление с тяговым стержнем 22, выключаются электромагниты 4 и 2, включается электромагнит 3. При этом подвижные захваты 5 вместе с втулкой 10, упорами И и якорями 9 возвращаются в исходное положение якорем 12. При этом движении рычаги с зубом 16 подвижных захватов 5 отходят от тягового стержня 22 в положение «откинуто.
Для спуска тягового стержня 22 из исходного положения выключают электромагнит 3, включают все секции электромагнита 2 сверху по одной, включают электромагнит 4. При этом рычаги с зубом 16 подвижных захватов
5 входят в зацепление с тяговым стержнем 22. Затем выключают электромагнит 6. В этом положении привод готов к спуску. Спуск производится под действием веса, действующего на тяговый стержень 22, выключением секций электромагнита 2 снизу по одной. После выключения верхней секции привод приходит в положение начала подъема.
В начале спуска тяговый стержень 22 создает «ломающий момент в каждой паре: рычаги с зубом 16 - рычаг 15 неподвижных захватов 7. При этом рычаги с зубом 16, вращаясь относительно рычага 15, перекатываются по тяговому стержню 22 и выходят из зацепления с ним, после чего он занимает положение «откинуто под действием более тяжелой нижней части.
Аналогичным образом происходит взаимодействие рычагов в подвижных захватах 5 при аварийном сбросе, когда привод обесточивается.
Рычаги с зубом 16 в положении «откинуто и рабочие зазоры в электромагнитах 4 и 6 ограничиваются штифтами 18. Поворот рычагов с зубом 16 относительно рычагов 15 также ограничивается штифтами 18.
Предмет изобретения
1. Линейный шаговый электромагнитный цривод, содержащий тяговый стержень с резьбой, подвижный и неподвижный захваты с электромагнитным управлением и тяговый электромагнит с якорем, соединенные корпусом, отличающийся тем, что, с целью уменьшения шага перемещения регулирующего органа, тяговый электромагнит выполнен из нескольких секций, установленных между собой с одинаковым рабочим зазором, равным
отнощению величины шага резьбы тягового стержня к числу секций, из которых крайняя от захвата имеет неподвижный упор в корпусе, а упором последующих секций служат якори предыдущих, каждый из которых соединен
с подвижным захватом через втулку и установленные на втулке для каждого якоря упоры.
2. Привод по п. 1, отличающийся тем, что подвижный и неподвижный захваты выполнены каждый из двух шарнирно связанных и шарнирно опирающихся элементов, расположенных так, что центр дуги, соединяющей шарниры и точку контакта с тяговым стерж нем, находится ниже точки контакта.
15
Фиг г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи поперечных стержней | 1980 |
|
SU1165519A1 |
| Механизм подачи сварочной проволоки | 1989 |
|
SU1764883A1 |
| УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ | 2003 |
|
RU2235958C1 |
| СТОПОР БЛОКА ОРУЖИЯ | 2013 |
|
RU2541600C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО МАТЕРИАЛА В ЗОНУ ОБРАБОТКИ | 1990 |
|
RU2028855C1 |
| КРОМКООБРАЗУЮЩЕЕ УСТРОЙСТВО БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА ДЛЯ ВЫРАБОТКИ МАХРОВОЙ ТКАНИ | 1992 |
|
RU2066719C1 |
| Устройство для дуговой сварки стержня с пластиной | 1990 |
|
SU1738536A1 |
| Коммутационное устройство в.и.яцКОВА | 1976 |
|
SU809427A1 |
| Устройство для вращения барабана подъемных ворот | 1979 |
|
SU937701A1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2012 |
|
RU2521609C2 |

