1
Изобретение относится к строительству, преимущественно к тоннелестроению и касается устройств для автоматического управления машиной, в частности, проходческим щитом.
Устройства для автоматического управления машиной предназначены для дистанционного автоматического контроля за положением машины, в частности, проходческого щита, на трассе.
Известны устройства для автоматического управления машиной, включающие источник светового модулированного луча с равносигнальной зоной (РСЗ), приемную оптическую систему и фотоэлемент с усилителем фототоКОБ.
в известном устройстве для автоматического управления машиной при смещении приемной оптической системы с РСЗ усилитель фототоков выдает сигнал, величина которого при одинаковом отклонении машины на разной дистанции различна. Когда приемная оптическая система находится на РСЗ, сигнал равен нулю. При смещении входного зрачка приемной оптической системы от РСЗ усилитель фототоков выдает сигнал соответствующего знака, например, плюс (положительное напряжение) при смещении вверх от РСЗ и минус (отрицательное напряжение) при смещении вниз от РСЗ. Таким образом, известное устройство для автоматического управления
машиной позволяет управлять этой машиной
только по знаку отклонения от заданной оси.
В связи с этим известное устройство для
автоматического управления машиной не может быть использовано в автоматической системе с пропорциональным управлением, у которой сигнал, поступающий на фотоэлемент, зависит только от величины отклонения и не зависит от дальности тракта светового луча,
поскольку в известном устройстве не предусмотрено учета изменения структуры светового луча. Это снижает эффективность и точность ведения машины по заданной трассе.
Цель изобретения - создание такого устройства для автоматического управления машиной, например проходческим щитом, которое обеспечит увеличение точности управления машиной за счет получения на фотоэлементе светового сигнала, не зависящего от дальности тракта светового луча. Это позволит использовать такое устройство в автоматических системах с пропорциональным управлением.
Это достигается тем, что между приемной оптической системой и фотоэлементом на продолжении оси РСЗ размещены дополнительные оптические элементы, например оптические клинья, установленные с возможностью вращения.
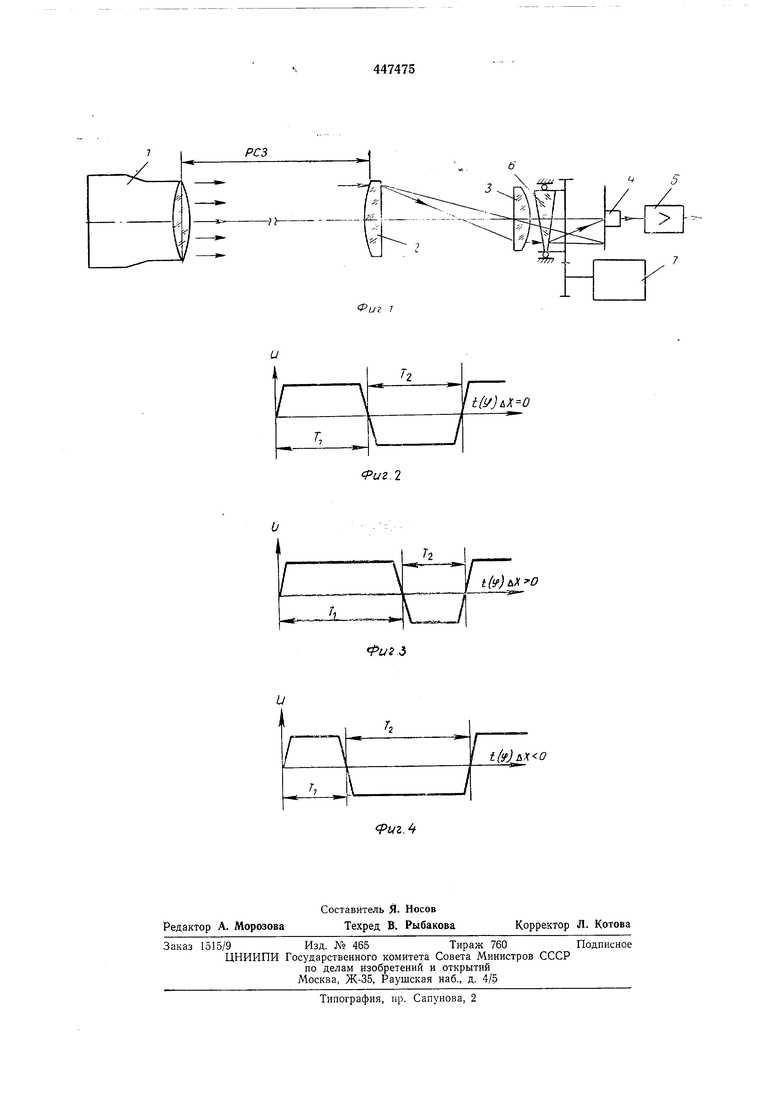
На фиг. 1 изображена принципиальная схема устройства, на фиг. 2 - форма сигнала, снимаемого с фотоприемника при расположении его на РСЗ, на фиг. 3 - то же, при смещении фотоприемника от РСЗ, например вверх, на фиг. 4 - то же, при смещении фотоприемника от РСЗ вверх.
На фиг. 2 - 4 приняты следующие обозначения: и - напряжение, t - время, ф - угол поворота клина, - смещение. Кроме того, устройство для автоматического управления машиной, например проходческим щитом, включает источник 1 светового модулированного луча с равносигнальной зоной, приемную оптическую систему, состоящую из объектива 2 и линзы 3, и фотоэлемент 4 с усилителем 5 фототоков. Между линзой 3 приемной оптической системы и фотоэлементом 4 на продолжении оси РСЗ размещены дополнительные оптические элементы, например, оптический клин 6, который приводит во вращение двигатель 7. Оптический клин 6 принимается таким, чтобы при его вращении изображение входного зрачка объектива 2 описывало круговое движение относительно центра плоскости приема светового сигнала фотоэлемента 4, т. е., чтобы на эту плоскость .попадали световые лучи поочередно от разных частей входного зрачка объектива 2.
Возможна установка нескольких оптических клиньев или сферического зеркала.
Предлагаемое устройство работает следующим образом.
Источником 1 светового модулированного луча с РСЗ задается направление движения машины. За счет вращения оптического клина. 6 двигателем 5 изображение входного зрачка объектива 2 проектируется на плоскость приема светового сигнала фотоэлемента 4, описывая относительно центра этой плоскости круговое движение.
Когда приемная оптическая система с объективом 2 и линзой 3 и фотоэлемент 4 находятся на оси РСЗ, т. е., когда их смещение от оси РСЗ Ал: равно нулю, усилитель 5 будет выдавать попеременно то положительное, то отрицательное напряжение в зависимости от положения оптического клина 6. При этом длительность положительного импульса TI будет равна длительности отрицательного импульса Гг (см. фиг. 2).
При смещении приемной оптической системы с объективом 2 и линзой 3 и фотоэлемента 4 с оси РСЗ, например вверх (, например ), длительность положительного импульса TI увеличивается, а отрицательного импульса Тч - уменьшается. Причем вет,-т
также больще нуля и явличипаTI + T,
ляется функцией только смещения Ал; и не зависит от дальности управления и пропускания тракта светового луча (см. фиг. 3).
При смещении приемной оптической системы с объективом 2 и линзой 3 и фотоэлемента 4 с оси РСЗ в противоположную сторону, например вниз (, например ), длительность положительного импульса TI
уменьщается, а отрицательного импульса увеличивается и величина
Tj-T, TI + T, оказывается отрицательной (см. фиг. 4).
Г у
Таким образом, величина - меняет
TI + T,,
знак в соответствии с изменением знака смещения Ал; и не зависит от дистанции управления.. Это дает возможность использовать устройство для автоматического управления машиной в автоматических системах с пропорциональным управлением.
При управлении по двум координатам усилитель фототоков 5 имеет две выходные цепи и картина сигналов при смещении входного зрачка объектива 2 на величину Аг/ в другой плоскости будет аналогична рассмотренной.
Предмет изобретения
Устройство для автоматического управлёния машиной, например, проходческим щитом, включающее источник светового модулированного луча с равносигнальной зоной, приемную оптическую систему и фотоэлемент с усилителем фототоков, отличающееся тем, что, с целью увеличения точности управления машиной за счет получения на фотоэлементе светового сигнала, не зависящего от дальности тракта светового луча, между приемной оптической системой и фотоэлементом на продолжении оси равносигнальной зоны размещены дополнительные оптические элементы, например оптические клинья, установленные с возможностью вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ И ПРОСТРАНСТВЕННОГО ОТСЛЕЖИВАНИЯ МОДУЛИРОВАННОГО ОПТИЧЕСКОГО ПУЧКА | 1991 |
|
RU2019820C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2066845C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНЫХ МАШИН | 1967 |
|
SU201936A1 |
| УСТРОЙСТСО для АВТОЛ\АТИЧнекого КОНТРОЛЯ и УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1971 |
|
SU310111A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ И ОТСЛЕЖИВАНИЯ ОПТИЧЕСКОГО ПУЧКА | 1991 |
|
RU2017181C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1991 |
|
SU1798988A1 |
| ФОТОЭЛЕКТРИЧЕСКОЕ ПРИЕМНОЕ УСТРОЙСТВО ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2021 |
|
RU2782236C1 |
| ЛАЗЕРНЫЙ ПРИЦЕЛ-ДАЛЬНОМЕР (ВАРИАНТЫ) | 2006 |
|
RU2348889C2 |
| ФАЗОВЫЙ СВЕТОДАЛЬНОМЕР | 1998 |
|
RU2139498C1 |
t (if) ДЛ О
