Известны системы управления рабочим органом землеройных машин, основанные на наведении по световому лучу прожектора, и содержащие устанавливаемое на рабочем органе машины фотоэлектрическое устройство. Однако эти системы, так же как и системы управления самонаводяш.ихся снарядов, самолетов и т. п., не обеспечивают постоянно высокой точности отработки заданного направления при изменении расстояния между задаюшим направление прожектором и рабочим органом.
В предлагаемой системе устранен этот суш.ественный недостаток благодаря тому, что в прожекторе установлен модулятор светового потока, создающий равносигнальную зону для фтоэлектрического приемного устройства, настроенного на соответствующие частоты модуляции.
Для повышения резкости и стабильности границы равносигнальной зоны в фокальной плоскости объектива прожектора установлена разделительная призма, а модулятор, выполненный в виде двух разнесенных относительно друг друга дисков с вырезами, расположен вне фокальной плоскости.
прожектора в вертикальной и горизонтальной плоскостях кинематически соединены со еле-дящими (шаговыми) двигателями программного устройства, содержащего автоматический дальномер для измерения расстояния между прожектором и управляемой машиной. Данная система может быть применена для управления рабочим органом металлообрабатывающих станков, а также з устройствах для
определения микропрофиля, например железных или автомобильных дорог.
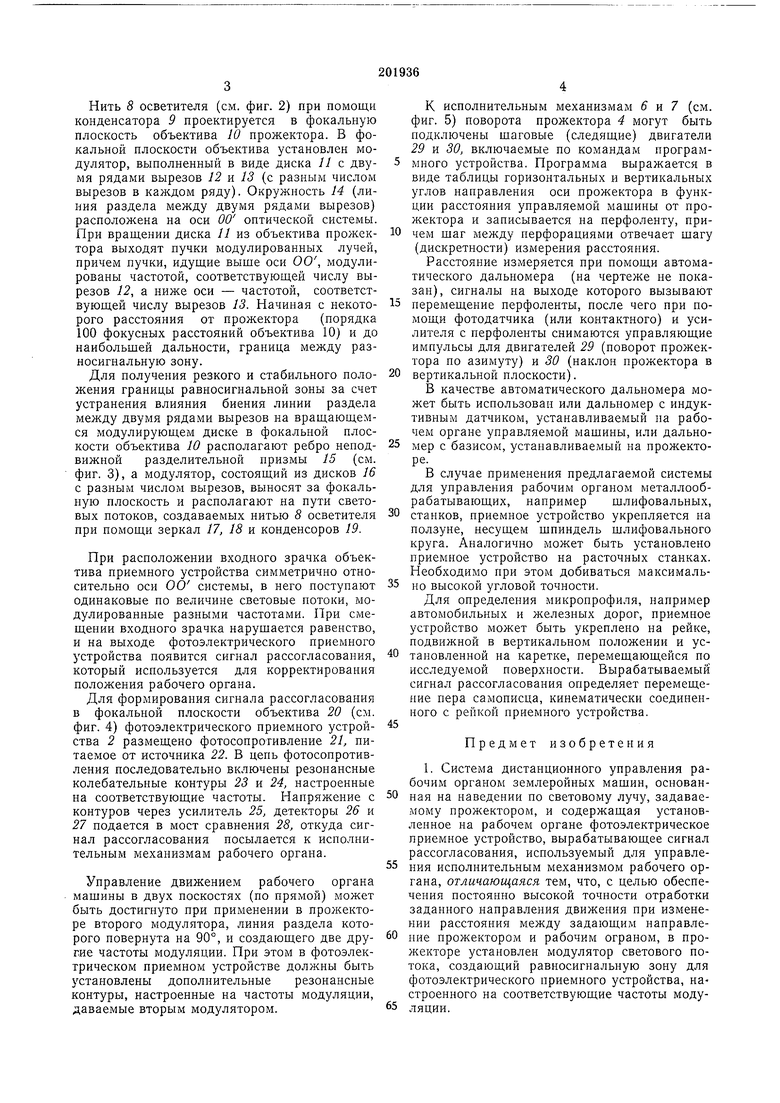
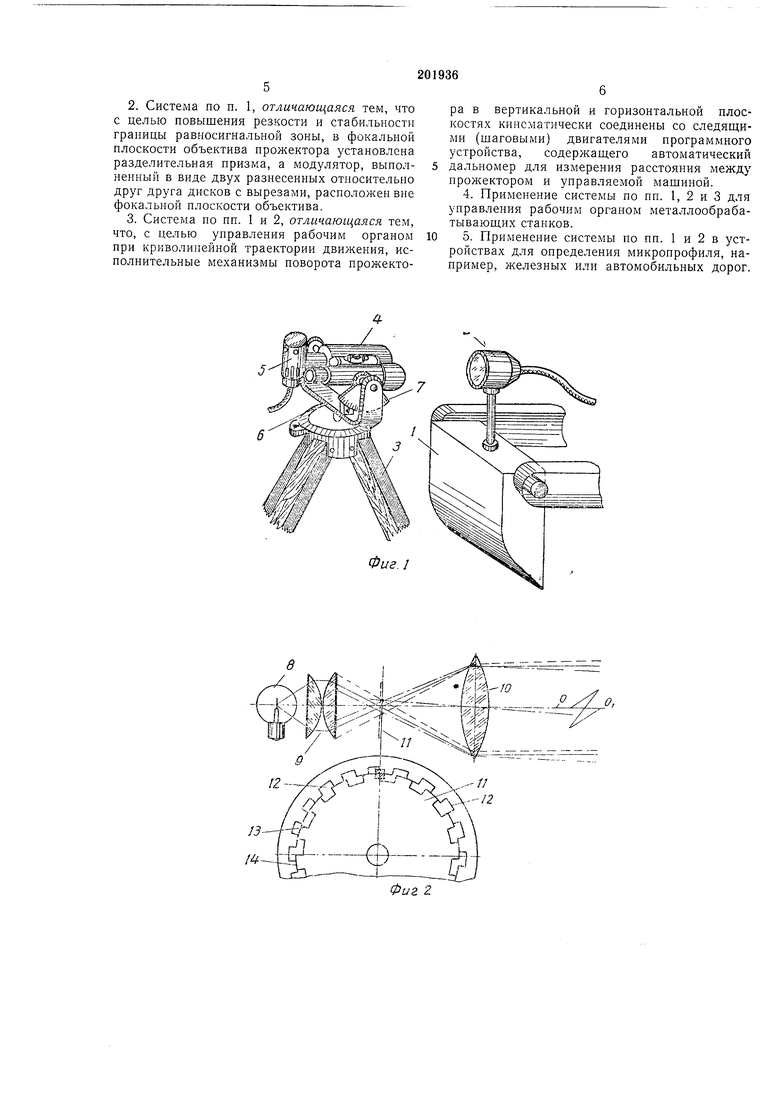
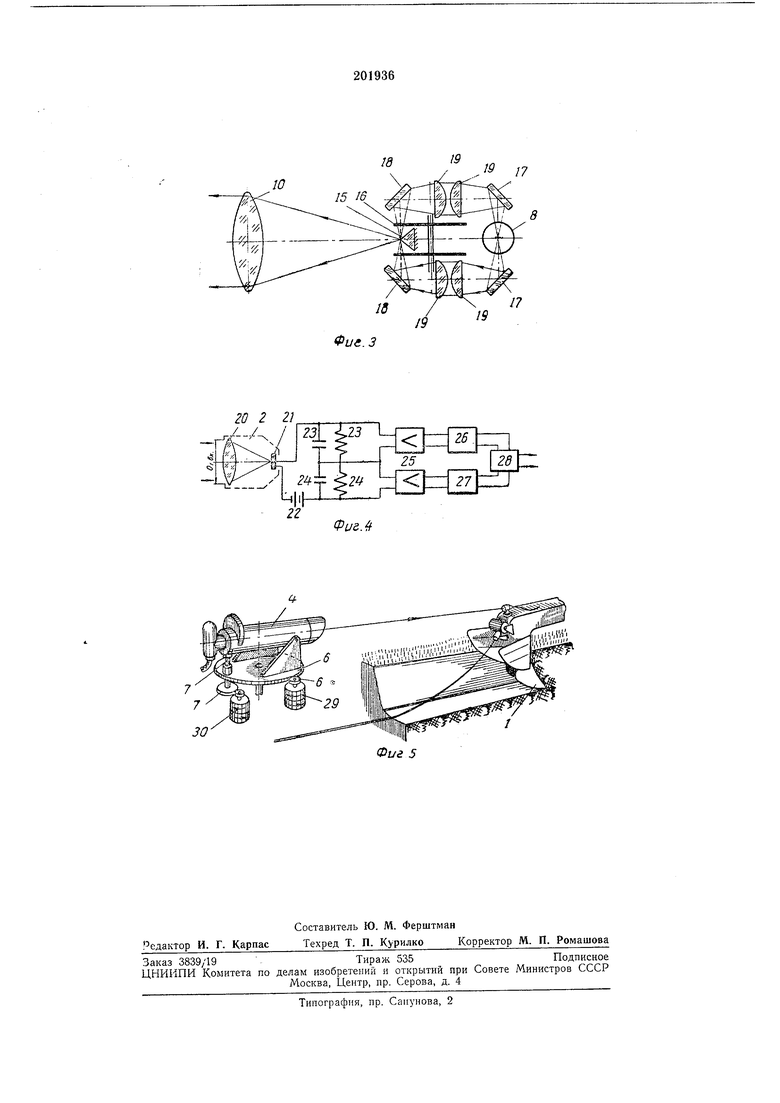
На фиг. 1 изображен общий вид описываемой системы управления; на фиг. 2 и 3 - варианты выполпения оптической схемы прожектора; на фиг. 4 - принципиальная электрическая схема фотоэлектрического приемного устройства; на фиг. 5 - вариант выполпения системы, снабженной программным устройством.
На рабочем органе / землеройной машины жестко укреплено фотоэлектрическое приемное устройство 2. На штативе 3 установлен прожектор 4, создающий направленный световой поток с выраженной равносигнальной зоной, воспринимаемый фотоэлектрическим приемным устройством. Прожектор имеет осветитель 5, в качестве которого служит лампа накаливания, исполнительные механизмы 6 и 7 поворота прожектора.
Нить 8 осветителя (см. фиг. 2) при помощи конденсатора 9 проектируется в фокальную плоскость объектива 10 прожектора. В фокальной плоскости объектива установлен модулятор, выполненный в виде диска 11 с двумя рядами вырезов 12 и 13 (с разным числом вырезов в каждом ряду). Окружность 14 (линия раздела между двумя рядами вырезов) расположена на оси 00 оптической системы. При вращении диска 11 из объектива прожектора выходят пучки модулированных лучей, причем пучки, идущие выше оси 00, модулированы частотой, соответствующей числу вырезов 12, а ниже оси - частотой, соответствующей числу вырезов 13. Начиная с некоторого расстояния от прожектора (порядка 100 фокусных расстояний объектива 10) и до наибольшей дальности, граница между разносигнальную зону.
Для получения резкого и стабильного положения границы равносигнальной зоны за счет устранения влияния биения линии раздела между двумя рядами вырезов на вращающемся модулирующем диске в фокальной плоскости объектива 10 располагают ребро неподвижной разделительной призмы 15 (см. фиг. 3), а модулятор, состоящий из дисков 16 с разным числом вырезов, выносят за фокальную плоскость и располагают на пути световых потоков, создаваемых нитью 8 осветителя при помощи зеркал 17, 18 и конденсоров 19.
При расположении входного зрачка объектива приемного устройства симметрично относительно оси ОО системы, в него поступают одинаковые по величине световые потоки, модулированные разными частотами. При смещении входного зрачка нарушается равенство, и на выходе фотоэлектрического приемного устройства появится сигнал рассогласования, который используется для корректирования положения рабочего органа.
Для формирования сигнала рассогласования в фокальной плоскости объектива 20 (см. фиг. 4) фотоэлектрического приемного устройства 2 размещено фотосопротивление 21, питаемое от источника 22. В цепь фотосопротивления последовательно включены резонансные колебательные контуры 23 и 24, настроенные на соответствующие частоты. Напряжение с контуров через усилитель 25, детекторы 26 и 27 подается в мост сравнения 28, откуда сигнал рассогласования посылается к исполнительным механизмам рабочего органа.
Управление движением рабочего органа машины в двух поскостях (по прямой) может быть достигнуто при применении в прожекторе второго модулятора, линия раздела которого повернута на 90°, и создающего две другие частоты модуляции. При этом в фотоэлектрическом приемном устройстве должны быть установлены дополнительные резонансные контуры, настроенные на частоты модуляции, даваемые вторым модулятором.
К исполнительным механизмам 5 и 7 (см. фиг. 5) поворота прожектора 4 могут быть подключены шаговые (следящие) двигатели 29 и 30, включаемые по командам программного устройства. Программа выражается в виде таблицы горизонтальных и вертикальных углов направления оси прожектора в функции расстояния управляемой машины от прол ектора и записывается на перфоленту, причем шаг между перфорациями отвечает шагу (дискретности) измерения расстояния.
Расстояние измеряется при помощи автоматического дальномера (на чертеже не показан), сигналы на выходе которого вызывают 5 перемещение перфоленты, после чего при помощи фотодатчика (или контактного) и усилителя с перфоленты снимаются управляющие импульсы для двигателей 29 (поворот прожектора по азимуту) и 30 (наклон прожектора в 0 вертикальной плоскости).
В качестве автоматического дальномера может быть использован или дальномер с индуктивным датчиком, устанавливаемый на рабочем органе управляемой машины, или дальномер с базисом, устанавливаемый на прожекторе.
В случае применения предлагаемой системы для управления рабочим органом металлообрабатывающих, например шлифовальных, станков, приемное устройство укрепляется на ползуне, несущем шпиндель шлифовального круга. Аналогично может быть установлено приемное устройство на расточных станках. Необходимо при этом добиваться максимально высокой угловой точности.
Для определения микропрофиля, например автомобильных и железных дорог, приемное устройство может быть укреплено на рейке, подвижной в вертикальном положении и установленной на каретке, перемешающейся по исследуемой поверхности. Вырабатываемый сигнал рассогласования определяет перемещение пера самописца, кинематически соединенного с рейкой приемного устройства.
Предмет изобретения
1. Система дистанционного управления рабочим органом землеройных машин, основанная на наведении по световому лучу, задаваемому прожектором, и содержащая установленное на рабочем органе фотоэлектрическое приемное устройство, вырабатывающее сигнал рассогласования, используемый для управлеиия исполнительным механизмом рабочего органа, отличающаяся тем, что, с целью обеспечения постоянно высокой точности отработки заданного направления движения при изменении расстояния между задающим направлеиие прожектором и рабочим ограном, в прожекторе установлен модулятор светового потока, создающий равносигнальную зону для фотоэлектрического приемного устройства, настроенного на соответствующие частоты моду2.Система по п. 1, отличающаяся тем, что с целью повышения резкости и стабильности границы равносигнальной зоны, в фокальной плоскости объектива прожектора установлена разделительная призма, а модулятор, выполненный в виде двух разнесенных относительно друг друга дисков с вырезами, расположен вне фокальной плоскости объектива.
3.Система по пп. 1 и 2, отличающаяся тем, что, с целью управления рабочим органом при криволинейной траектории движения, исполнительные механизмы поворота прожектора в вертикальной и горизонтальной плоскостях кинематически соединены со следящими (шаговыми) двигателями программного устройства, содержащего автоматический дальномер для измерения расстояния между прожектором и управляемой машиной.
4.Применение системы по пн. 1, 2 и 3 для управления рабочим органом металлообрабатывающих станков.
5.Применение системы по пп. 1 и 2 в устройствах для определения микропрофиля, например, железных или автомобильных дорог.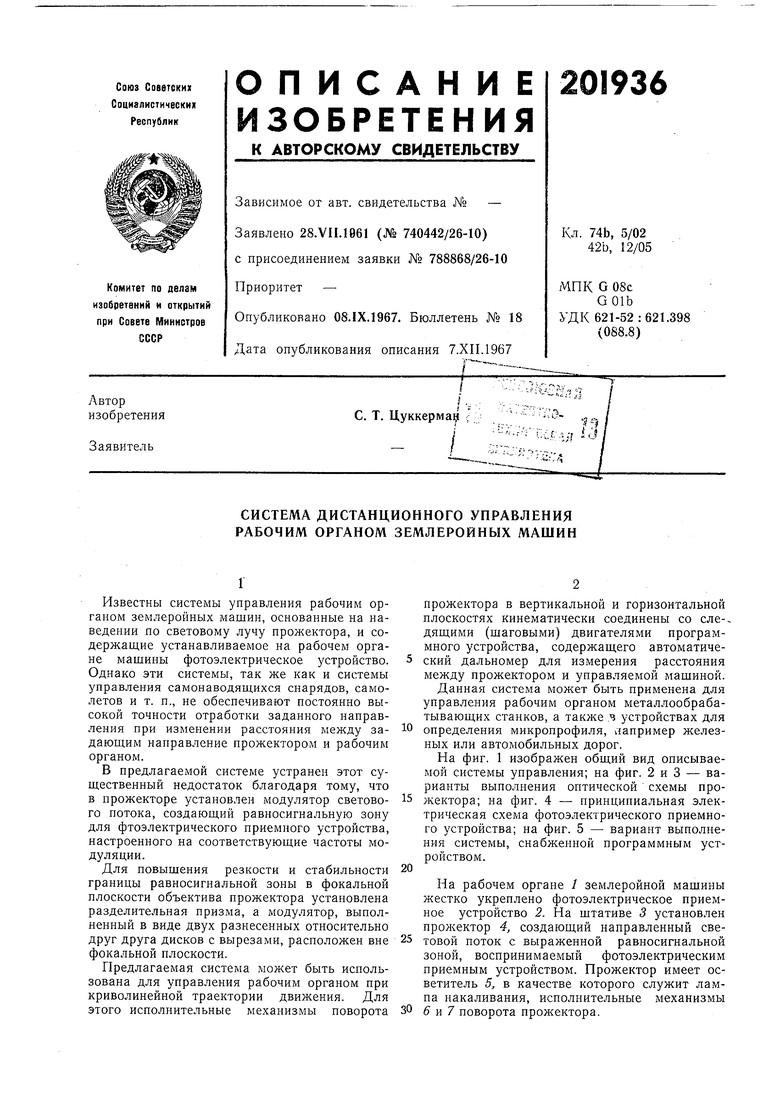
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОКОНТУРОВКИ СТЫКУЕМЫХ ЭЛЕМЕНТОВ | 1973 |
|
SU380520A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1966 |
|
SU216415A1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| УСТРОЙСТСО для АВТОЛ\АТИЧнекого КОНТРОЛЯ и УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1971 |
|
SU310111A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2066845C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252395C1 |
| Способ установки блока корпусаСудНА HA СТАпЕлЕ (ЕгО ВАРиАНТы) | 1979 |
|
SU800015A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Устройство для измерения атмосферной рефракции | 1978 |
|
SU739384A1 |
Фиг.
R о,
Фил.З
20 2 2
30
19 /7
