1
Изобретение относится к области сооружения тоннелей щитовым способом и предназначено для использования в проходческих щи.тах при строительстве тоннелей различного назначения (коммунального, промышленного, тоннелей метрополитена и т. д.).
Известны различные системы для автоматического контроля и ведения проходческих машин, содержащие для задания направления источник светового луча (прожектор), устанавливаемый в тоннеле, приемное фотоэлектрическое устройство, закрепленное на щите, и исполнительные механизмы выправления положения щита.
Предлагаемое устройство позволяет упростить конструкцию и оптическую часть приемного устройства путем использования только одного фотоприемника сигнала рассогласования, размещенного в точке на оси сферического зеркала, изображения которых совпадают с контролируемыми точками Щита (ножевой и хвостовой частями).
Кроме того, оно обеспечивает увеличение Дальности работы системы благодаря полному отражению светового луча сферическим зеркалом на указанный фотоэлемент, а также значительное расширение области применения за счет возможности использования его в совокупности со световыми источниками модулированного луча различной конструкции (фазовая модуляция, частотная и др.).
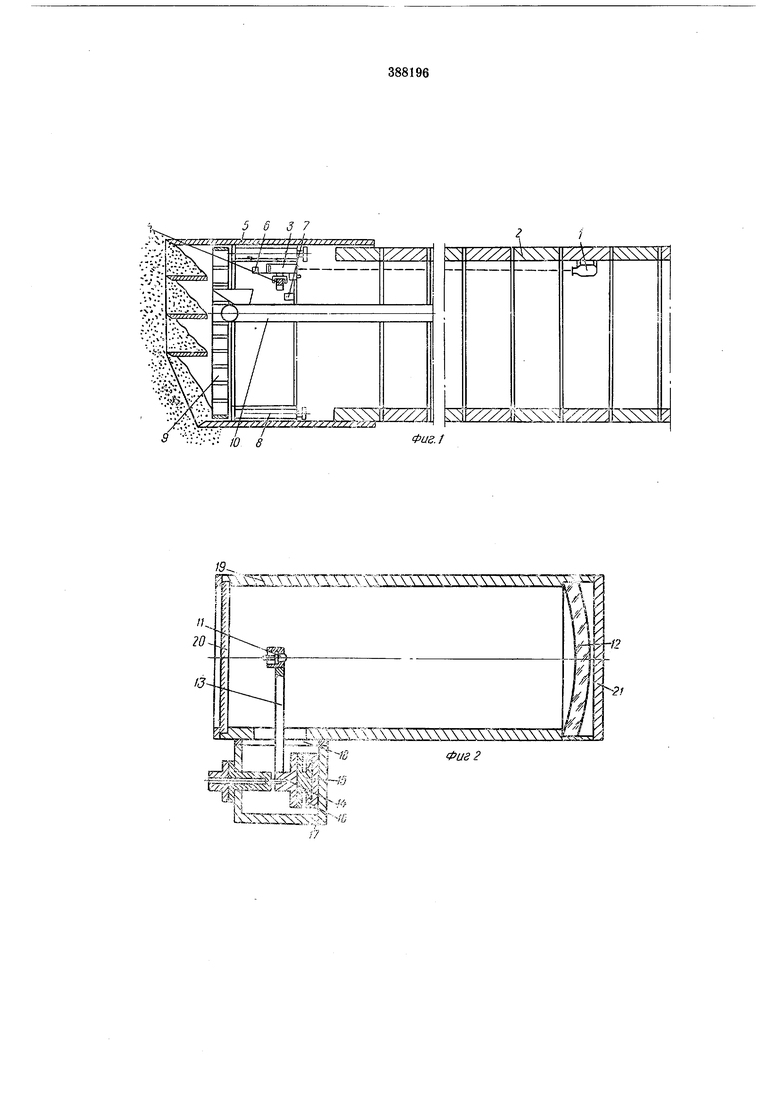
На фиг. 1 схематически изображен проходческий щит, снабженный предлагаемым устройством; на фиг. 2 - приемное устройство без подводящих проводов; на фиг. 3 и 4 - приемное устройство при расположении фотоэлемента сигнала рассогласования в месте получения его изображения в плоскости ножевой части щита и хвостовой соответственно.
Устройство (фиг. 1) содержит передающее устройство 1 с модулированным источником света, устанавливаемое в верхней части обделки 2 готового тоннеля; приемное устройство 3, расположенное на дуговых направляющих 4, прикрепленных к опорному кольцу корпуса щита 5 и концентричных последнему; прибор б контроля за креном щита,
размещенный на одной площадке с приемным устройством; логический блок 7, вырабатывающий командный сигнал и устанавливаемый на щите в удобном для оператора месте; исполнительные механизмы 8 выправления положения щита (щитовые домкраты); роторный ковщевой погрузчик 9 и ленточный транспортер 10.
Приемное устройство (фиг. 2) выполнено из фотоприемника 11 сигнала рассогласования, размещенного на оси сферического вогнутого зеркала 12. Фотоприемник укреплен на стойке 13 каретки 14 поперечного перемещения, ласточкин хвост 15 которой расположен в направляющей 16 каретки 17 продольного перемещения. Каретки позволяют перемещать фотоприемник в горизонтальной и вертикальной плоскостях. Каретка 17 имеет возможность перемещаться в направляющих 18 вдоль продольной оси приемного устройства в расчетные точки Л и Б по обе стороны фокуса сферического зеркала 12. Приемное устройство собирается в. корпусе 19, в передней части которого установлено защитное стекло 20, а сзади крыщка 21.
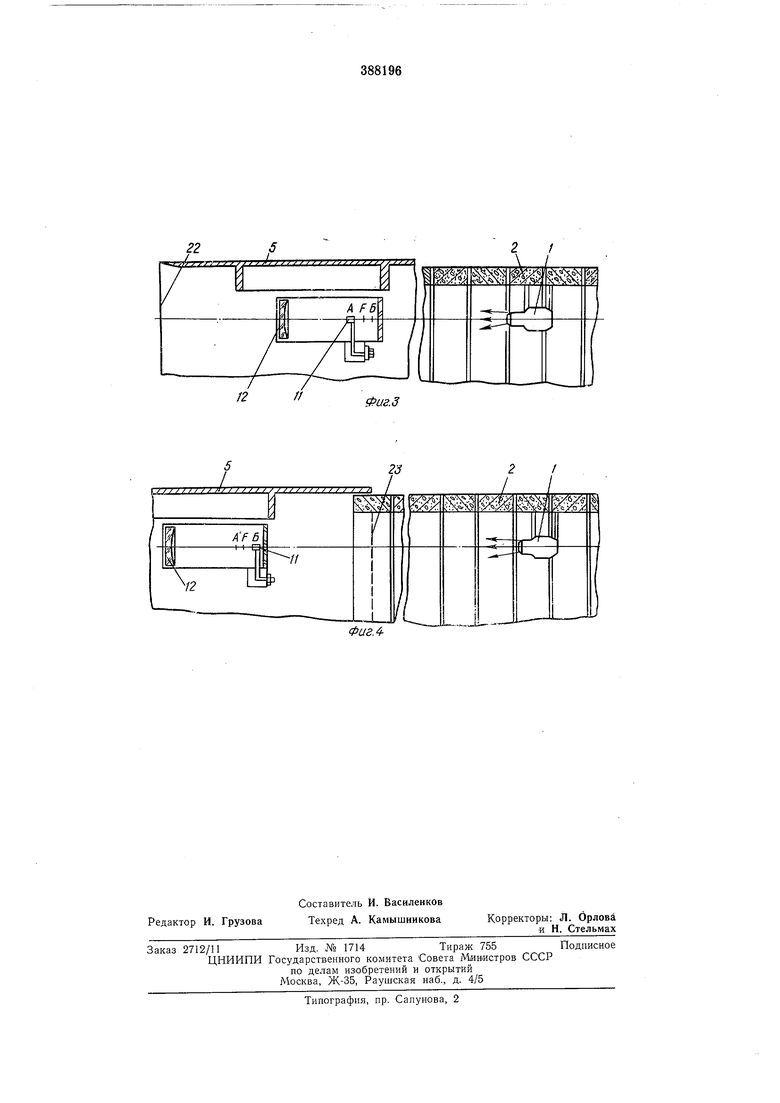
На фиг. 3 показано приемное устройство, когда фотоприемник помещен в точку А. При этом его изображение получается в плоскости 22 ножевой части корпуса щита 5.
На фиг. 4 показано приемное устройство, когда фотоприемник помещен в точку Б. При этом его изображение получается в плоскости 23 хвостовой части корпуса щита 5.
Работает устройство следующим образом.
Передающим устройством 1, установленным в верхней части готового тоннеля, задается направление трассы тоннеля. МодулироВ:анный луч, попадая на приемное устройство 3, закрепленное на щите, отражается от сферического зеркала 12 и проходит на фотоприемник 11 сигнала рассогласования. Если фотоприемник находится точно на оси луча, т. е. в равносигнальной зоне, то перемещенного сигнала с него не снимается. Если фотолриемник, а значит и сам щит, смещается в сторону, то с фотоприемника снимается сигнал рассогласования, который подается в логический блок 7.
Для определения положения проходческого щита относительно оси луча прожектора в логический блок 7 попеременно поступает сигнал рассогласования от точек щита ножевой 22 и хвостовой 23 его плоскостей. Для этого фотоприемиик // (автО(матически через заданный промежуток времени или вручную) попеременно помещают в точки А к Б путем перемещения каретки 17 по направляющим 18.
Логический блок 7 вырабатывает командные сигналы на органы выправления щита по заранее составленной программе в зависимости от месторасположения приемника сигнала рассогласования в ножевой и хвостовой плоскостях щита относительно оси луча прожектора, т. е. равно;сигнальной зоны. При этом в зависимости от направления смещения щита логическое устройство подает команды на отключение определенной группы щитовых домкратов, создавая тем самым необходимый момент для выправления щита. .Когда фотоприемник сигнала рассогласовадия при помещении его в точки Л и вновь попадает в равносигнальную зону, что
соответствует выходу проходческого щита на проектную ось, исчезает командный сигнал и логическое устройство подает команду на включение ранее отключенных щитовых домкратов.
Для ведения автоматического контроля положения ножевой и хвостовой частей проходческого щита, т. е. получения координат точек этих частей по осям управления X и F,
сигнал рассогласования с логического устройства подается на приводы перемещения фотоприемника в горизонтальной и вертикальной плоскостях. Когда фотоприемник возвращается в равносигнальную зону, его
перемещение прекращается. Перемещение фотоприемника в равносигнальную зону можно проводить и вручную при помощи рукояток до момента, пока не погаснет сигнальная лампа рассогласования каждого направления
в логическом устройстве. Величина возврата
фотоприемника по осям управления X я Y
равна величине отклонения контролируемых
точек и считывается на шкалах рукояток.
Для исключения ошибок, при автоматическом контроле и ведении щита за счет вращения последнего вокруг своей продольной оси, приемное устройство 3 постоянно возвращается на первоначальную вертикальную ось. Перемещение приемного устройства происходит па дуговым направляющим 4, концентричным корпусу щита 5, от сигнала прибора 6 контроля за кручением щита, напри.мер индуктивного маятника. Как только приемное устройство (а вместе с ним и прибор контроля за кручением щита) вернется на первоначальную ось, сигнал от прибора 6 на привод перемещения приемного: устройства по дуговым направляющим прекращается.
Предмет изобретения
Устройство для автоматического контроля и управления движением проходческого щита, содержащее передающее устройство с модулированным источником света, устанавливаемое в верхней части тоннеля, приемное Зстройство, закрепленное на щите в пределах опорного кольца, логический блок, вырабатывающий командные сигналы в зависимости от положения приемного устройства относительно оси передающего устройства, и исполнительные механизмы выправления положения щита, отличающееся тем, что, с целью
упрощения оптической и электронной частей приемного устройства, а также увеличения времени работы всей системы, приемное устройство содержит сферическое вогнутое зеркало и фотоприемник сигнала рассогласования, размещенный на его оси и закрепленный на стойке каретки поперечного перемещения, установленной на каретке продольного перемещения. 5637 :ivy;v7; / / 3 .:: to 8 IZZZZ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТСО для АВТОЛ\АТИЧнекого КОНТРОЛЯ и УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1971 |
|
SU310111A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Устройство управления движением проходческого щита | 1980 |
|
SU949188A1 |
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1966 |
|
SU216415A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для автоматического управления машиной | 1973 |
|
SU447475A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Устройство для определения отклонения проходческого щита относительно проектной оси тоннеля | 1983 |
|
SU1125375A1 |
19ТТ Т,
№
/;, 20::ш
0LZJ tZb5JISI53XSS5SS
f..;i( i ,i,;; i. .4 i,
12
Фаг 2
f/ I
2 /
/
т
ш
Фиг.З
2 I
ФигЛ
