РЬобретение относится к области приборостроения.
Известны устройства для автоматического контроля и унравления движением проходческого щита в плане и профиле, содержащие передающее устройство с модулированным источником света и оптической системой, установленное в верхней части тоннеля, приемное устройство, закрепленное на щите в предела.х опорного кольца, логически блок, вырабатывающий командные сигналы в зависимости от положения приемного устройства относительно оси луча передаюп1:его устройства, и исполнительные механизмы.
Предлагаемое устройство позволяет повысить точность ведения нгига по проектной линии, упростить оптическую систему прожектора (источника света) путем изменения принципа модуляции луча и увеличения базы контролируемых точек и обеспечивает ведение автоматического контроля положения щита при проходке, а также позволяет исключить ощибки за счет кручения щита вокруг своей продольной оси.
Это достигается тем, что в фокальной плоскости объектива передающего устройства установлен полудисковый вращающийся модулятор, создающий зону постоянного сигнала. а приемное устройство содержит два фотоприе.миика опорного сигнала, расположенные
на вертикальной и горизонтальной осях вне его центра, а также светоделительное зеркало и два фотоприемника сигнала рассогласования, которые установ.тены на оси светоделительного зеркала в точках, соответствующих проектированию одного или двух фотог,риемников сигнала рассогласования в места проходческого щита, иодлежащие контролю, причет дальний от передаюп1,его устройства фотоприемник имеет диаметр входного зрачка больщий, чем у переднего фотоприемпика.
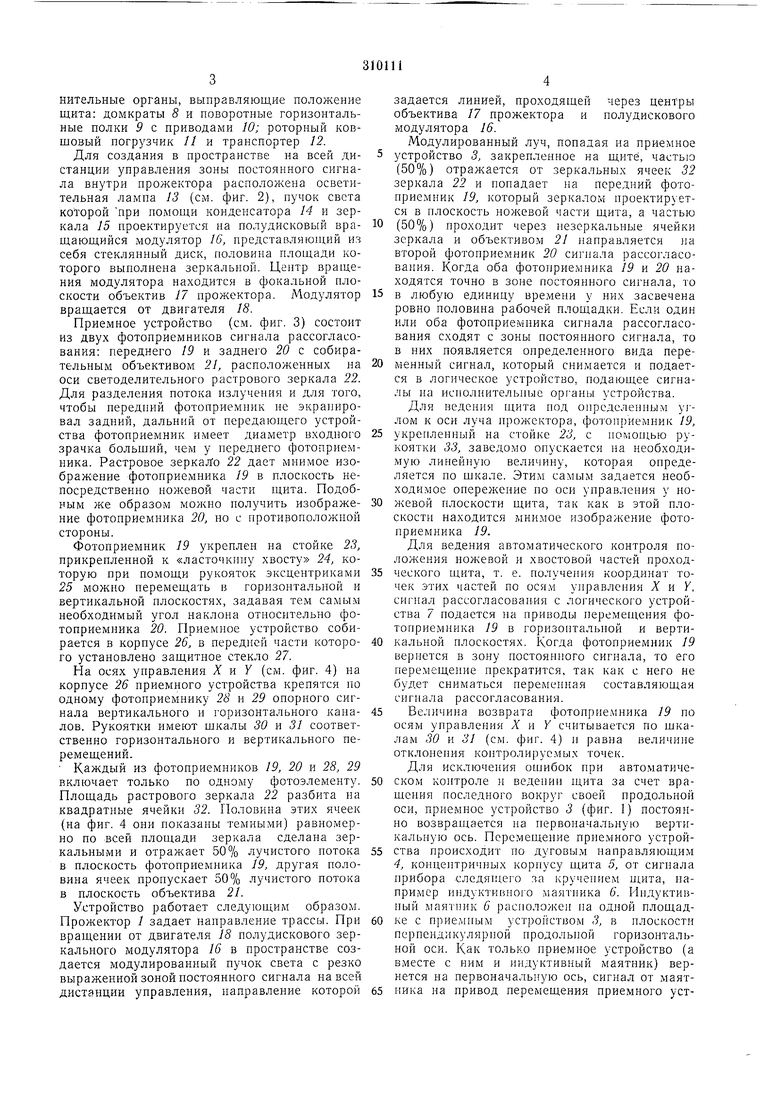
На фиг. 1 показан проходческий щит, с абженный описываемым устройством; на фиг. 2 - оптическая система прожектора слюдулятором; па фиг. 3-общий вид приемного устройства; на фиг. 4 - то же, вид снереди.
Устройство (см. фиг. 1) содержит источник модулированного света (нрол ектор) /, подвещиваемый к верхней части отделки готового тоннеля 2; приемное устройство 3, расположенное на дуговых направляющих 4, прикрепленных к опорному кольцу корпуса щита 5 и концентричных последнему; индуктивный маятник 6, расположенный на одной площадке с npneiMHbiM устройством в плоскости, перпендикулярной продольной горизонтальной оси; логическое устройство 7, вырабатывающее командный сигнал и устанавливаемое на п;нте в удобном месте для оператора; исполнительные органы, выправляющие положение щита: домкраты 8 и поворотные горизонтальные полки 9 с приводами 10; роторный ковшовый погрузчик // и транспортер 12.
Для создания в пространстве на всей дистанции управления зоны постоянного сигнала внутри прожектора расположена осветительная лампа 13 (см. фиг. 2), пучок света которой при помощи конденсатора 14 и зеркала 15 проектируется на полудисковый вращающийся модулятор 16, предстаБЛяюн1,ий из себя стеклянный диск, половина площади которого выполнена зеркальной. Центр вращения модулятора находится в фокальной плоскости объектив 17 прожектора. Модулятор вращается от двигателя 18.
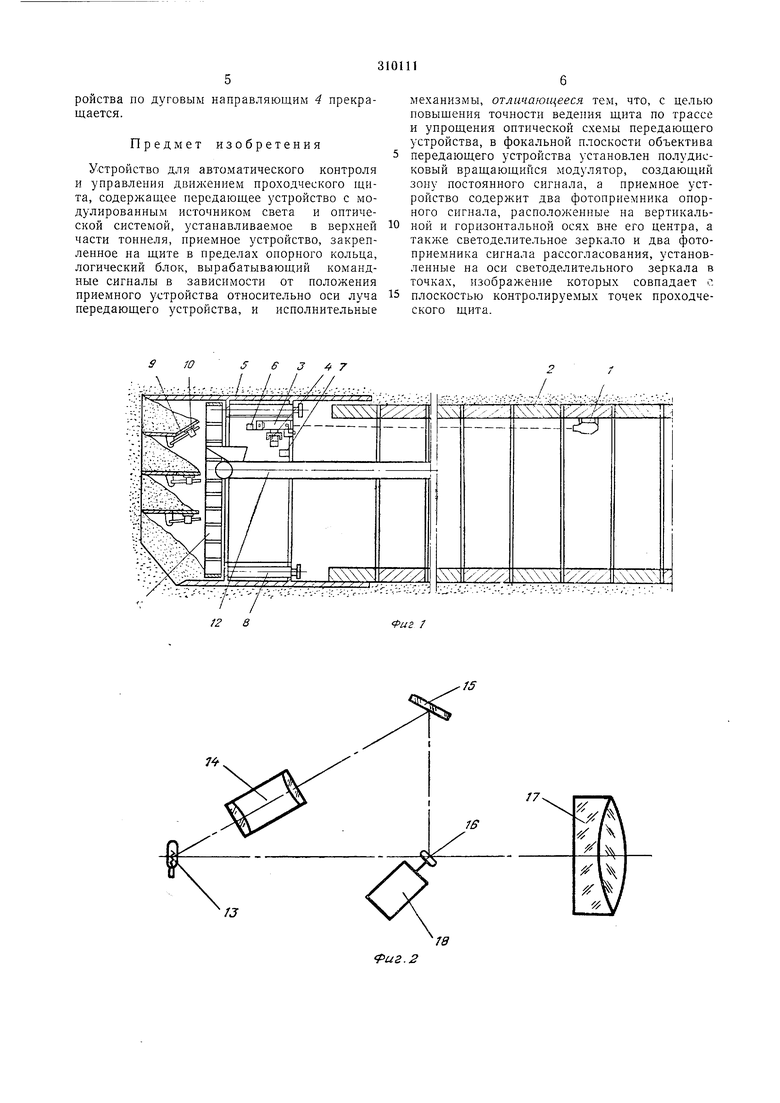
Приемное устройство (см. фиг. 3) состоит из двух фотоириемников сигнала рассогласования: переднего 19 и заднего 20 с собирательным объективом 21, расположенных на оси светоделительного растрового зеркала 22. Для разделения потока излучения и для того, чтобы передний фотоприемник не экранировал задний, дальний от передаюнгего устройства фотоприемник имеет диаметр входного зрачка больший, чем у переднего фотопрнемника. Растровое зеркало 22 дает мнимое изображение фотоприемника 19 в плоскость непосредственно ножевой части щита. Подобным же образом можно нолучить изображение фотоприемника 20, по с противоположной стороны.
Фотоприемник 19 укреплен на стойке 23, нрикренленной к «ласточкину хвосту 24, которую при помощи рукояток эксцентриками 25 можно неремещать в горизонтальной и вертикальной плоскостях, задавая тем самым необходимый угол наклона относительно фотоприемиика 20. Приемное устройство собирается в корпусе 26, в передней части которого установлено защитное стекло 27.
На О.СЯХ унравления X и Y (см. фиг. 4) на корпусе 26 приемного устройства крепятся но одному фотоприемнику 28 и 29 опорного сигнала вертикального и горизонтального каналов. Рукоятки имеют шкалы 30 и 31 соответственно горизонтального и вертикального неремещений.
Каждый из фотоприемников 19, 20 и 28, 29 включает только по одному фотоэлементу. Площадь растрового зеркала 22 разбита на квадратные ячейки 32. Половина этих ячеек (на фиг. 4 они показаны темными) равномерно по всей нлощади зеркала сделана зеркальными и отражает 50% лучистого потока в плоскость фотонриемника 19, другая половина ячеек пронускает 50% лучистого потока в плоскость объектива 21.
Устройство работает следующим образом. Прожектор 1 задает нанравление трассы. При вращении от двигателя 18 полудискового зеркального модулятора 16 в пространстве создается модулированный пучок света с резко выраженной зоной постоянного сигнала на всей дистанции унравления, направление которой
задается линией, проходящей через центры объектива 17 прожектора и полудискового модулятора 16.
Модулированный луч, попадая на приемное устройство 3, закрепленное на щите, частью (50%) отражается от зеркальных ячеек 32 зеркала 22 и попадает на передний фотонриемник 19, который зеркалом проектируется в плоскость ножевой части , а частью
(50%) проходит через незеркальные ячейки зеркала и объективом 21 направляется на второй фотоприемник 20 сигнала рассогласования. Когда оба фотоприемника 19 и 20 находятся точно в зоне постоянного сигнала, то
в любую единицу времени у них засвечена ровно половина рабочей площадки. Если один или оба фотоприемпика сигнала рассогласования сходят с зоны постоянного сигна.та, то в них появляется определенного вида переменный сигнал, который снимается и подается в логическое устройство, подающее сигналы на исполнительные органы устройства.
Для ведения щита нод опредслеппым yj-лом к оси луча прожектора, фотоприемник 19,
укрепленный на стойке 23, с помоп1,ью рукоятки 33, заведомо опускается на необходимую линейную величину, которая определяется по шкале. Этим самым задается необходимое опережепие по оси управлепия у ножевой плоскости щита, так как в этой плоскости находится мнимое изображение фотоприемника 19.
Для ведения автоматического контроля положения ножевой и хвостовой частей проходческого щита, т. е. получения координат точек этих частей по осям управления X и Y, сигнал рассогласования с логического устройства 7 подается на приводы перемещения фотоприемника 19 в горизонтальной и вертикальной нлоскостях. Когда фотоприемник 19 вернется в зону постоянного сигнала, то его перемещение нрекратится, так как с него не будет сниматься перемепная составляющая сигнала рассогласования.
Величина возврата фотонриемника 19 по осям управления X и Y считывается по шкалам 30 и 31 (см. фиг. 4) и равна величине отклонения контролируемых точек. Для исключения ошибок при автоматическом контроле и ведении за счет вращения последного вокруг своей продольной оси, приемное устройство 3 (фиг. 1) постоянно возвращается на первоначальную вертикальную ось. Перемещение прнемного устройства происходит по дуговым направляющим 4, концентричных корпусу щита 5, от сигнала нрибора следян;его за кручением щита, например индуктивного маятника 6. Пндуктивный маятник 6 расположен на одной площадке с приемным устройством 3, в плоскости перпендикулярной продольной горизонтальной оси. Как только приемное устройство (а вместе с ним и индуктивный маятник) вернется на первоначальную ось, сигнал от маятройства по дуговым направляющим 4 прекращается.
Предмет изобретения
Устройство для автоматического контроля и управления движением проходческого щита, содержащее передающее устройство с модулированным источником света и оптической системой, устанавливаемое в верхней части тоннеля, приемное устройство, закрепленное на щите в предеьТах опорного кольца, логический блок, вырабатывающий командные сигналы в зависимости от положения приемного устройства относительно оси луча передающего устройства, и исполнительные
механизмы, отличающееся тем, что, с нелью повышения точности ведения щита по трассе и упрощения оптической схемы передающего устройства, в фокальной плоскости объектива передающего устройства установлен полудисковый вращающийся модулятор, создающий зону постоянного сигнала, а приемное устройство содержит два фотоприемника опорного сигнала, расположенные на вертикальной и горизонтальной осях вне его центра, а таклче светоделительное зеркало и два фотоприемника сигнала рассогласования, установленные на оси светоделительного зеркала в точках, изображение которых совпадает о, плоскостью контролируемых точек проходческого щита.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
| Способ преобразования неэлектрических величин в электрический сигнал | 1973 |
|
SU506891A1 |
| Фотоэлектрический автоколлиматор | 1974 |
|
SU528532A1 |
| Фотоэлектрическая автоколлимационная насадка | 1972 |
|
SU451039A1 |
| СВЕТОПРОЕКЦИОННЫЙ ДАЛЬНОМЕР | 1967 |
|
SU191152A1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОННО-ОПТИЧЕСКОГО ТАХЕОМЕТРА | 1994 |
|
RU2097694C1 |
| Устройство для контроля прямолинейности | 1986 |
|
SU1362928A1 |
| Устройство для дистанционного контроля углов разворота объекта | 1974 |
|
SU550529A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНЫХ МАШИН | 1967 |
|
SU201936A1 |
| Фотоэлектрический автоколлиматор | 1976 |
|
SU591792A1 |
с е lf-;-T7 L. f f :-:/.-7 / s J 7 : лз: I I I I I V
