1
Изобретение относится к области управления электроприводами постоянного тока с вентильными преобразователями, ток якоря электродвигателей которых должен быть ограничен при динамических процессах.
В основном авт. св. № 167565 описан способ управления двигателем ностоянного тока, питающимся от управляемого вентильного преобразователя, заключающийся в регулировании предельно допустимого по величине якорного тока угла зажигания вентилей в функции э. д. с. двигателя.
Однако этот способ не предусматривает регулировку предельного тока якоря в функции скорости вращения двигателя, что необходимо для получения удовлетворительной коммутации при изменении потока двигателя.
С целью улучшения коммутации при изменении потока двигателя по предлагаемому способу отклонение угла зажигания вентилей от значения, соответствующего э. д. с. двигателя, регулируют в функции его скорости вращения.
На фиг. 1 и 2 представлены два варианта устройств, реализующих предлагаемый способ; на фиг. 3 - линейные диаграммы напряжений для второго варианта устройства.
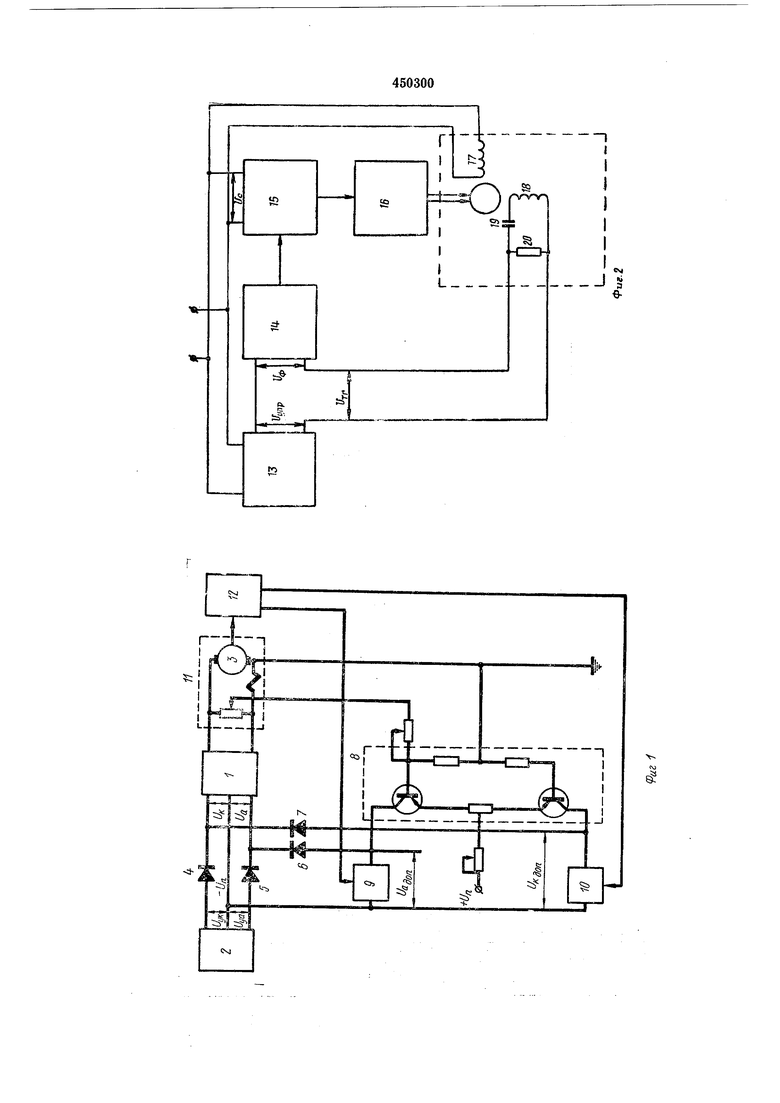
В первом варианте устройства (см. фиг. I) вентильный преобразователь 1 управляется сигналом промежуточного усилителя 2. Предельно допустимая величина входного напряжения вентильного преобразователя ограничивается в функции э. д. с. и скорости двигателя 3 таким образом, чтобы угол зажигания
вентилей соответствовал максимально допустимому току якорной цепи для данного мгновенного значения скорости двигателя. Сигналы э. д. с. и скорости двигателя не задают величину угла зажигания вентилей, а только ограничивают его предельное значение. На анодную и катодную группы преобразователя 1 подаются раздельные управляющие сигналы Ua. и UK. Увеличение t/a или UK приводит к уменьшению выходного напряжения преобразователя 1 соответствующей полярности. Поэтому для ограничения выходного напряжения преобразователя необходимо, чтобы напряжения Ua (или С/к) не могли быть менее напряжения t/a (или С/кдоп ) данного значения э. д. с. и скорости двигателя 3. Это осуществляется логическим суммированием через диоды 4-7 напряжений (L/ук с
кдоп и С/уа с /ад,„ .
Если при работе, например, катодной группы С/ук С/кдоп ™ 4 открыт, а диод 7 закрыт. Преобразователь I управляется от промежуточного усилителя 2. Если /ук ;С/кдоп , то диод 4 запирается, открывается диод 7 и независимо от величины напряжения усилителя 2 UK Управление анодной группой осуществляется аналогичным образом. Балансный каскад 8 и регулируемые в функции скорости сопротивления 9 и 10 обеспечивают требуемую зависимость кдоп f/адоп функции э.д. с. И скорости вращения
двигателя. Сигнал э.д. с. двигателя вырабатывается с помощью моста И, а сигнал скорости - датчиком 12 скорости.
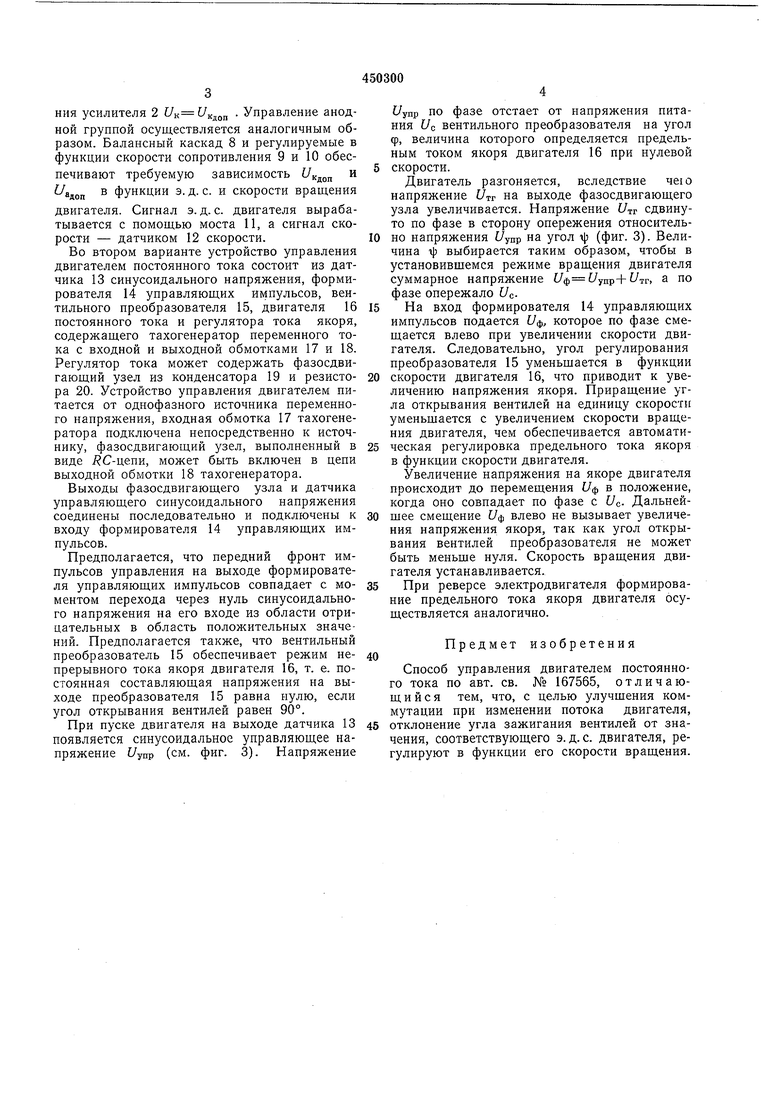
Во втором варианте устройство управления двигателем постоянного тока состоит из датчика 13 синусоидального напряжения, формирователя 14 управляющих импульсов, вентильного преобразователя 15, двигателя 16 постоянного тока и регулятора тока якоря, содержащего тахогенератор переменного тока с входной и выходной обмотками 17 и 18. Регулятор тока может содержать фазосдвигающий узел из конденсатора 19 и резистора 20. Устройство управления двигателем питается от однофазного источника переменного напряжения, входная обмотка 17 тахогенератора подключена непосредственно к источнику, фазосдвигающий узел, выполненный в виде : С-цепи, может быть включен в цепи выходной обмотки 18 тахогенератора.
Выходы фазосдвигающего узла и датчика управляющего синусоидального напряжения соединены последовательно и подключены к входу формирователя 14 управляющих импульсов.
Предполагается, что передний фронт импульсов управления на выходе формирователя управляющих импульсов совпадает с моментом перехода через нуль синусоидального напряжения на его входе из области отрицательных в область положительных значений. Предполагается также, что вентильный преобразователь 15 обеспечивает режим непрерывного тока якоря двигателя 16, т. е. постоянная составляющая напряжения на выходе преобразователя 15 равна нулю, если угол открывания вентилей равен 90°.
При пуске двигателя на выходе датчика 13 появляется синусоидальное управляющее напряжение t/ynp (см. фиг. 3). Напряжение
t/ynp по фазе отстает от напряжения питания f/o вентильного преобразователя на угол ф, величина которого определяется предельным током якоря двигателя 16 при нулевой скорости.
Двигатель разгоняется, вследствие чею напряжение f/тг на выходе фазосдвигающего узла увеличивается. Напряжение /тг сдвинуто по фазе в сторону опережения относительно напряжения t/ynp на угол ф (фиг. 3). Величина ij) выбирается таким образом, чтобы в установившемся режиме вращения двигателя суммарное напряжение /ф /упр+t/тг, а по фазе опережало UcНа вход формирователя 14 управляющих импульсов подается иф, которое по фазе смещается влево при увеличении скорости двигателя. Следовательно, угол регулирования преобразователя 15 уменьщается в функции
скорости двигателя 16, что приводит к увеличению напряжения якоря. Приращение угла открывания вентилей на единицу скорости уменьщается с увеличением скорости вращения двигателя, чем обеспечивается автоматическая регулировка предельного тока якоря в функции скорости двигателя.
Увеличение напряжения на якоре двигателя происходит до перемещения f/ф в положение, когда оно совпадает по фазе с L/C. Дальнейщее смещение /ф влево не вызывает увеличения напряжения якоря, так как угол открывания вентилей преобразователя не может быть меньще нуля. Скорость вращения двигателя устанавливается.
При реверсе электродвигателя формирование предельного тока якоря двигателя осуществляется аналогично.
Предмет изобретения
Способ управления двигателем постоянного тока по авт. св. № 167565, отличающийся тем, что, с целью улучщения коммутации при изменении потока двигателя, отклонение угла зажигания вентилей от значения, соответствующего э.д.с. двигателя, регулируют в функции его скорости вращения.