Известные способы управления двигателями постоянного тока, питающимися от управляемых вентильных преобразователей, для устранения ударов якорного тока предусматривают введение инерционных элементов в цепь сеточного уиравления вентилями или в силовую цепь, что значительно снижает быстродействие управления такими приводами.
Предлагается способ управления таким приводом, обеспечивающий безынерционное устранение ударов якорного тока. Способ заключается в том, что предельно допустимый по величине якорного тока угол зажигания вентилей регулируется в функции э. д. с. двигателя.
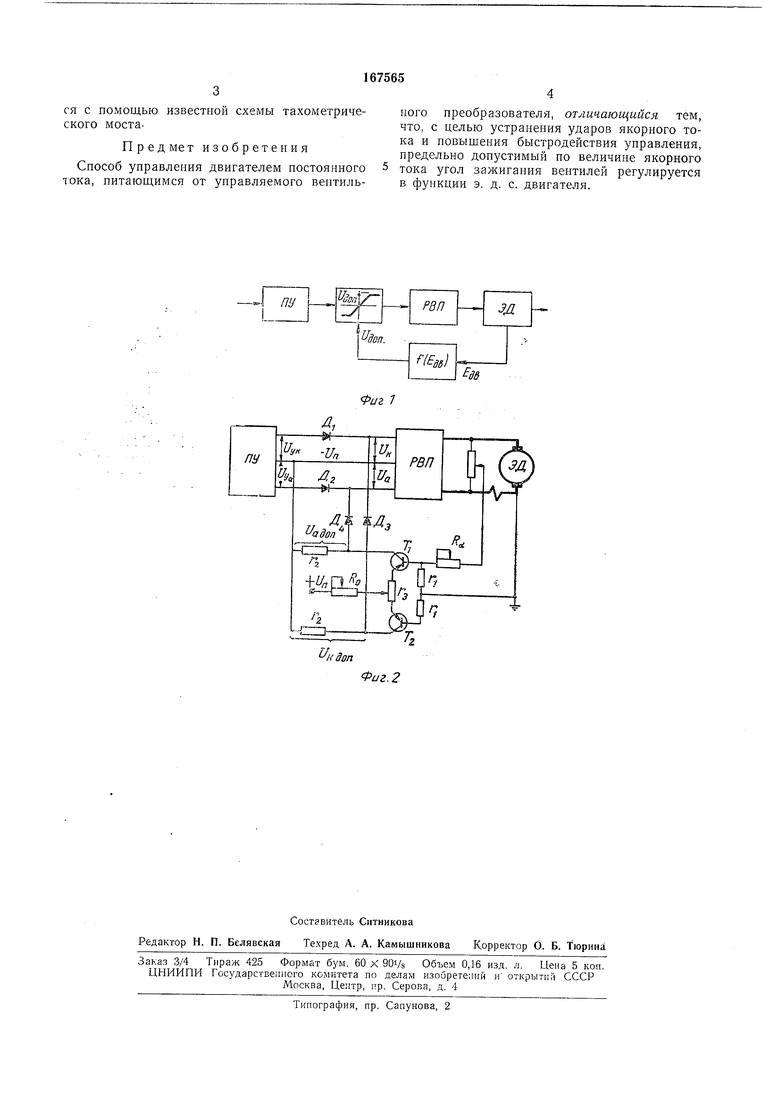
На фиг. 1 изображена блок-схема устройства, служащего для осуществления описываемого способа; иа фиг. 2 - один из вариантов выполнения такого устройства.
Управление реверсивным вентильным преобразователем РВП производится сигналом промежуточного усилителя ЯУ. Предельно допустимая величина входного напряжения РВП (U 1)о„) ограничивается в функции э. д. с. двигателя таким образом, чтобы угол зажигания вентилей соответствовал максимально допустимому току якорной цени. Сигнал э. д. с. не задает величину угла зажигания вентилей, а только ограничивает его предельное значение. Максимальный выходной сигнал РВП
соответствует нулевому выходному сигналу ЯУ. На анодную и катодную группы преобразователя РВП подаются раздельные управляющие сигналы Ua и LJ.
Увеличение LJa или U приводит к уменьщению выходного напряжения РВП соответствующей полярности. Поэтому для ограничения выходного напрял ения РВП необходимо, чтобы напряжения U (или U) не моглк быть ниже величины L,,, (или U., ). Это
бол -«Зол
осуществляется логическим суммированием через диоды напряжений U . с и t/,,a с /7,, .
уиа-доп
Если при работе, например, катодной группы 0,„ к:ад„,то диод Дх отперт, а Дз -- заперт. РВП управляется от ЯУ. Если У ,,„ Kfion диод Дх запирается, открывается диод Дз и независимо от величины выходного напряжения усилителя ЯУ 1),, кдоп- Р вление анодной группой осуществляется аналогичным образом. Балансный каскад с эмиттерной связью на триодах Ti и
2 и сопротивлениях , /i, г., гз, Ко обеснечивает требуемую зависимость 0 f() и uQgn f(Ede. Величина опорного напряжения задается сопротивлением ., а наклон характеристики ,1 ) - сонротивлеся с помощью известной схемы тахометрического мостаПредмет изобретения
Способ управления двигателем постоянного 1ока, питающимся от управляемого вептильного преобразователя, отличающийся тем, что, с целью устранения ударов якорного тока и повышения быстродействия управления, предельно допустимый по величине якорного тока угол зажигания вентилей регулируется в функнии э. д. с. двигателя.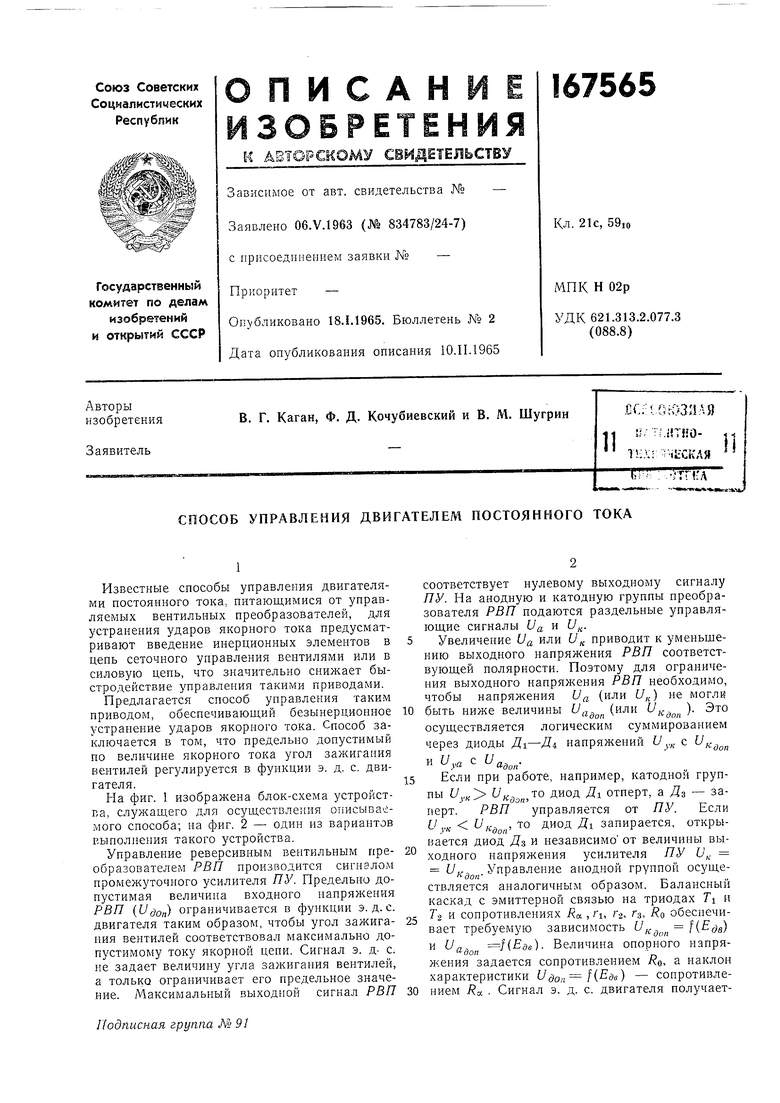
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем постоянного тока | 1971 |
|
SU450300A2 |
| СПОСОБ ИМПУЛЬСНО-НЕПРЕРЫБНОГО РЕГУЛИРОВ.4НИЯ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1964 |
|
SU165812A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| ЭЛЕКТРОПРИВОД С ОТСЕЧКОЙ ПО ТОКУBvHisimi-iL^ | 1972 |
|
SU323834A1 |
| УСТРОЙСТВО для ИНДИКАЦИИ НЕСРАБАТЫВАНИЯ ПАРАЛЛЕЛЬНО ВКЛЮЧЕННЫХ ВЕНТИЛЕЙ ВЫПРЯМИТЕЛЯ | 1968 |
|
SU208104A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Устройство для управления электродвигателем постоянного тока | 1977 |
|
SU928579A1 |
| Вентильный двигатель | 1977 |
|
SU692014A1 |
| Электрическая машина постоянного тока с управляемым вентильно-механическим коммутатором | 1977 |
|
SU736275A1 |
| Вентильный электродвигатель | 1985 |
|
SU1354351A1 |
й
