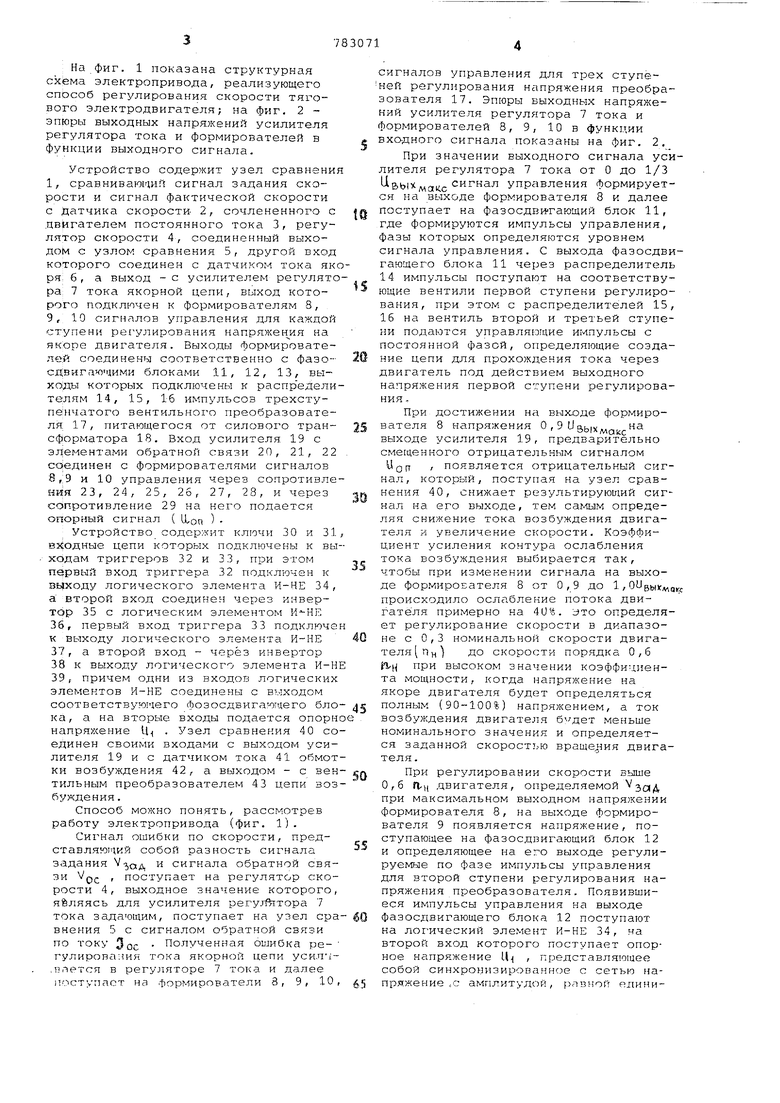
Изобретение относится к электротехнике и может быть использовано в тяговых электроприводах элёктроподвижного состава для регулирования скорости движения. Известен способ регулирования ско рости тягового электродвигателя, заключающийся в том, что сравнивают сигнал задания скорости с сигналом фактической скорости и полученный сигнал рассогласования по скорости сравнивают с сигналом обратной связи по току якоря, полученный сигнал ра согласования по току якоря преобразу ют в импульсы управления выпрямитель ными мостами преобразователя, напряжением которого воздействуют на якор ную цепь двигателя, сигнал задания .тока возбуждения двигателя сравнивают с сигналом фактического тока возбуждения, полученный сигнал рассогла сования подают через вентильный возбудитель на независимую обмотку возбуждения двигателя, при этом из сигнала рассогласования по току якоря вычитают опорный сигнал и разностным сигналом со знаком, противоположным знаку сигнала задания тока возбуждения, воздействуют на обмотку возбуждения двигателя i . Однако такой способ регулирования скорости двигателя имеет недостаток, заключающийся в том, что несмотря на применение двух и более ступеней регулирования напряжения на якоре тягового двигателя, на скоростях движения от 40 до 70 км/ч имеют место заниженные (от 0,6 до 0,8Х значения коэффициента мощности. Заниженные значения коэффициента мощности в указанных диапазонах скоростей являются следствием фазового регулирования напряжения на второй и третьей ступени регулирования якорного напряжения двигателя. Целью изобретения является повышение коэффициента мощности. Цель достигается тем, что опорный сигнал определяют как уровни напряжений, равные 0,9-1 значения выпрямленного напряжения каждого кроме последнего моста вентильного преобразователя, питающего якорную цепь двигателя, а при переходе значений сигнала рассогласования по току якоря от уровня, равного предшествующему опорному сигналу до О,9 последующего уройня, сбрасывают сигнал управления ослаблением тока возбуждения до нуля. На фиг. 1 показана структурная схема электропривода, реализующего способ регулирования скорости тягового электродвигателя; на фиг. 2 эпюры выходных напряжений усилителя регулятора тока и формирователей в функции выходного сигнала. Устройство содержит узел сравнени 1, сравниваю1аиЛ сигнал задания скорости и сигнал фактической скорости с Датчика скорости- 2, сочлененного с двигателем постоянного тока 3, регулятор скорости 4, соединенный выходом с узлом сравнения 5, другой вход которого соединен с датчиком тока як ря, б, а выход - с усилителем регулят ра 7 тока якорной цепи, выход которого подключен к формирователям 8, 9, 10 сигналов управления для каждой ступени регулирования напряжен ия на якоре двигателя. Выходы фop 1иpoвaтeлей соединены соответственно с фазосдвигаоаими блоками 11, 12, 13, выхо,ды которых подключены к распредели телям 14, 15, 16 импульсов трехступен-гатого вентильного преобразователя 17, питающегося от СИЛОБОГО трансформатора 18. Вход усилителя 19 с элементами обратной связи 20, 21, 2 соединен с формирователями сигналов 8,9 и 10 управления через сопротивле ния 23, 24, 25, 26, 27, 28, и через сопротивление 29 на него подается опорный сигнал ( lion ) Устройство содержит ключи 30 и 3 входные цепи которых подключены к вы ходам триггеров 32 и 33, при этом первый вход триггера 32 подключен к выходу логического элемента И-НЕ 34 а второй вход соединен через инвертор 35 с логическим элементом 36,первый вход триггера 33 подключ к выходу логического элемента И-НЕ 37,а второй вход - через инвертор 38 к выходу логического элемента И39, причем одни из входов логически элементов И-НЕ соединены с выходом соответствую1чего фозосдвигаюидего бл ка, а на вторые входы подается опор напряжение Ц . Узел сравнения 40 с единен своими входами с Быходог 1 уси лителя 19 и с датчиком тока 41 обмо ки возбуждения 42, а выходом - с ве тильным преобразователем 43 цепи во буждения . Способ можно понять, рассмотрев работу электропривода (фиг. 1). Сигнал ошибки по скорости, представляю1чий собой разность сигнале задания и сигнала обратной свя зи VQJ. , поступает на регулятор ско рости 4, выходное значение которого яйляясь для усилителя peryjftiTOpa 7 тока задающим, поступает на узел ер внения 5 с сигналом обратной связи по току Зое Полученная ошибка регулирования тока якорной цепи усилч ,зпется Б регуляторе 7 тока и далее iiocTynnoT на Формирователи 8, 9, Ю сигналов управления для трех ступеней регулирования напряжения преобразователя 17. Эпюры выходных напряжений усилителя регулятора 7 тока и формирователей 8, 9, 10 в функции вхо-дного сигнала показаны на фиг. 2, При значении выходного сигнала усилителя регулятора 7 тока от О до 1/3 Цg,,i,,ii сигнал управления формируется на выходе формирователя 8 и далее поступает на фазосдвитающий блок 11, где формируются импульсы управления, фазы которых определяются уровнем сигнала управления. С выхода фазосдвигающего блока 11 через распределитель 14 импульсы поступают на соответствующие вентили первой ступени регулирования, при этом с распределителей 15, 16 на вентиль второй и третьей ступени подаются управляюгцие импульсы с постоянной фазой, определяющие создание цепи для прохожддения тока через двигатель под действием выходного напряжения первой ступени регулирования , При достижении на выходе формирователя 8 напряжения О , 9 О a, на выходе усилителя 19, предварительно смещенного отрицательным сигналом U о fT , появляется отрицательный сигнал, который, поступая на узел сравнения 40, снижает результирующий сигнал на его выходе, тем самым определяя снижение тока возбуждения двигателя и увеличение скорости. Коэффициент усиления контура ослабления тока возбуждения выбирается так, чтобы при изменении сигнала на выходе формирователя В от 0,9 до 1, OUgwit g,, происходило ослабление потока двигателя примерно на 40%. Уто определяет регулирование скорости в диапазоне с 0,3 номинальной скорости двигателя (Пн) до скорости порядка 0,6 i/( при высоком значении коэффициента мощности, когда напряжение на якоре дБигателя будет определяться полным (90-100%) напряжением, а ток возбуждения двигателя меньше номинального значения и определяется заданной скоростт.-ю вращения двигателя. При регулировании скорости выше 0,6 П.), двигателя, определяемой при максимальном выходном напряжении формирователя 8, на выходе формирователя 9 появляется напряжение, поступающее на фазосдвигающий блок 12 и определяющее на его выходе регулируемые по фазе импульсы управления для второй ступени регулирования напряжения преобразователя. Появившиеся импульсы управления на выходе фазосдвигающего блока 12 поступают на логический элемент И-НЕ 34, на второй вход которого поступает опорное напряжение U , представляющее собой синхронизированнсзе с сетью напряжение с амплитудой, равной единице при положительной полуволне пита ющего напряжения и нулю при отрицательной. При этом в положительный полупериод питающего напряжения на выходе логического элемента И-НЕ 34 будет формироваться нуль, определяющий на выходе триггера 32 сигнал, включающий ключ 30 и закорачивающий сигнал с выхода формирователя 8 на нуль через сопротивление 23. Сигнал ослабления потока снимается, так как выходное напряжение усилителя 19 становится равным нулю. При достижении выходного сигнала формирователя 9 О , 9UaiyXMq)ic выходе усилителя 19 появляется сигнал ослаб ления потока двигателя, определяющий снижение тока возЗуждения двигателя и осуществляющий регулирование скорости от 0,6 до 0,9 ан за счет изме ненияс, потока, двигателя с высоким коэффициентом мощности. При повыиении задания на регулято скорости выше 0,9 П-н наряду с макси мальными сигналами на выходах формирователей 8, 9 появляется сигнал на формирователе 10, а также появляются регулируемые по фазе импульсы управления на выходе фазосдвигающего блока 13, при этом (аналогично описанно му выше) на выходе логического элемента И-НЕ 37 появляется нуль, определяющий опрокидывание триггера 33, выходным напряжением которого открывается ключ 31, закорачивающий сигна с выхода формирователя 9 на нуль через сопротивление 25. Под действием смещения на выходе усилителя 19 уста навливается нулевое значение. Дальнейшее регулирование скорости происходит при малых углах регулирования третьей ступени и при превышении ско рости двигателя 0,9 Пи за счет ослаб ленного потока двигателя. Возвращение в исходное состояние триггера 33 и размыкание ключа 31 пр изводятся импульсами управления фазо сдвигающего блока 12 при отсутствии регулируемых по фазе импульсов на выходе фазосдвигающего блока 13. И соответственно возврат в исходное со стояние триггера 32 и размыкание клю ча 30 производятся регулируемыми по фазе импульсами фазосдвигающего блок 11 при отсутствии регулируемых по фа зе импульсов на выходе фазосдвигающе го блока 12. Формирование опорных уровней, соответствующих 0,9 уровню открытия вентилей отдельных мостов многоступенчатого вентильного преобразователя осуществляется в системе управления опорным сигналом Uon который подают через сопротивление 29 на вход усилителя 19.Значение напряжени и Of, определяется -тмакс оп- 5Г- -коэффициент, опродслягде К ютдий уровень опорного напряжения и равный 0,9; -максимальное значение выходного сигнала усилителя регулятора 7 тока. Формирование стопроцентного уровня опорного сигнала для первой и второй ступени регулирования в системе управления осуществляется в моменты появления импульсов, peгyлиpye 1ыx по фазе, соответственно на фазосдвигающих блоках 12 и 13. Сброс сигнала управления током возбуждения в диапазоне изменения выходного сигнала усилителя регулятора тока от стопроцентного предшествующего уровня опорного сигнала до девяностопроцентного последующего уровня осуществляется путем шунтирования сигналов с выходов формирователей В и 9 ключами 30 и 31 соответственно на входе усилителя 19. Управление ключами 30 и 31 осуществляется логическими схемами, состоящими из триггеров 32 и 33 соответственно и логического элемента И-НЕ 34, инвертора 35, логического элемента И-НЕ 36 и логического элемента И-НЕ 37, инвертора 38, логического элемента И-НЕ 39 соответственно. Для выделения сигнала управления током возбуждения только при превышении выходным сигналом регулятора тока опорного напряжения в цепи обратной связи усилителя 19 включают обратную связь 22 . Получение опорного сигнала, состоящего из уровней напряжений, пропорциональных 0,9 значениям выпрямленных напряжений каждого, кроме последнего моста многоступенчатого вентильного преобразователя, питающего якорную цепь двигателя, позволяет регулировать скорость двигателя путем ослабения поля двигателя в конце каждой ступени регулировар{ия якорного напряения. Это определяет более высокий коэффициент мощности преобразователя, питающего якорь двигателя по сравме нию со способом, взятым за прототип, более меньший уровень реактивной ощности. Для управляемых выпрямителей в ервом приближении можно принять, что . еактивная мощность , Qn Pn-tg4n (), где Р, - активная мощность преобразователя ; Срр, - угол сдвига между током и напряженисМ основной частоты на т:орв:1гной обмотке трансформатора; oL - угол рет-у .чиров л ПИЯ преобраэорстгеля ; у - угол но.-;--;-/:-I ;;;; яоитилсй. Для оценки снижения реактивной мощности, потребляемой из сети преоб разователем, по сравнению с прототипом принимаем, что реализованный коэффициент могцности COS tp) системах регулирования по предлагаемому спосо бу будет выше на величину порядка 10 15%, что определяется в основном условиями движения поезда: движением на желтый и красный сигналы, движением с ограниченной скоростью дО 15, 25, 40, 50 км/ч при производстве путевых ремонтных работ. Тогда величина снижения реактивно мощности при. повышении коэффициента мощности с 0,6 до 0,66-0,69 составит соответственно 21% и 9%, За счет снижения потребляемой реактивной мощности снизятся активные Потери при передаче ее, а также снизятся потери напряжения в сети на ве личину QK.-X ли -, где Qк компенсируемая реактивная мощность , X - индуктивное сопротивление - напряжение сети. Уменьшенные потери напряжения в сети приведут к повышению производительности приводов, в частности, для электроподвижного состава, одновреме но работающего на линии, что позволи Например, повысить скорость поездов. Сбрасывание сигнала управления т ком возбуждения до нуля в диапазона значений выходного сигнала усилител регулятора тока якорной цепи от сто процентного преди1ествуютего уровня опорного сигнала до девяностопроцен ного последующего уровня позволяет при необходимом интенсивном разгоне привода исключить режим осла бления потока двигателя на промежуточных ступенях регулирования якорного напряжения. Формула изобретения Способ регулирования скорости тягового электродвигателя, заключающийся в том, что сравнивают сигнал задания скорости с сигналом фактической скорости и полученный сигнал рассогласования по скорости сравнивают с сигналом обратной связи по току якоря, полученный сигнал рассогласования по току якоря преобразуют в импульсы управления выпрямительными мостами rtpeобразователя, напряжением которого воздействуют на якорную цепь двигателя, сигнал задания тока возбуждения двигателя сравнивают с сигналом фактического возбуждения, полученный сигнал рассогласования подают через вентильный возбудитель на независимую обмотку возбуждения двигателя при этом из сигнала рассогласования по току якоря вычитают опорный сигнал и разностным сигналом со знаком, противоположным знаку сигнала задания тока возбуждения, воздействуют на обмотку возбуждения двигателя, отличающийся тем, что, с це- лью повышения коэффициента мощности, опорный сигнал определяют как уровни напряжений, равные 0,9-1 значения выпрямленного напряжения каждого кроме последнего моста вентильного преобразователя, питающего якорную цепь двигателя, а при переходе значений сигнала рассогласования по току якоря от уровня, равного предшествующему опорному сигналу, до 0,9 последующего уровня, сбрасывают сигнал управления ослаблением тока возбуждения до нуля. Источники информации, принятые во внимание при экспертизе 1. Проспект фирмы ASEA Jhyristor lokomotives today and tomorrov pamphlet. Edition ТВ 22-103E, 01.03.72.
ибкЮ
фиг. Z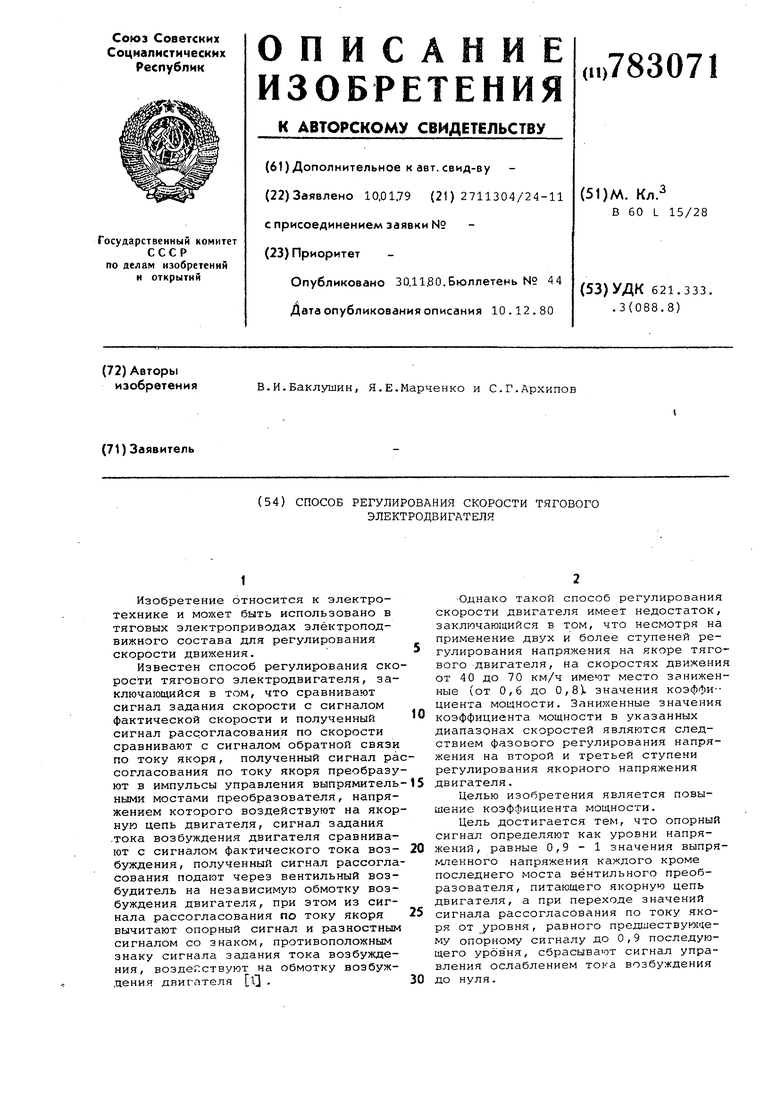


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД НЕГОДЫ | 1989 |
|
RU2020715C1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Способ управления двигателем постоянного тока | 1971 |
|
SU450300A2 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |


