Изобретение относится к сборочному оборудованию и может быть использовано в различных областях техники, в частности при ремонте оборудования атомных электростанций.
Известны устройства для монтажа и демонтажа гаек шпилечного соединения, снабженные установленными на раме рабочими гаяовками и пневматической системой управления.
С целью обеспечения автоматической перестановки головки с одной гайки на другую на боковой поверхности рамы выполнен копирный паз, взаимодействующий с роликом, жестко укрепленным на головке.
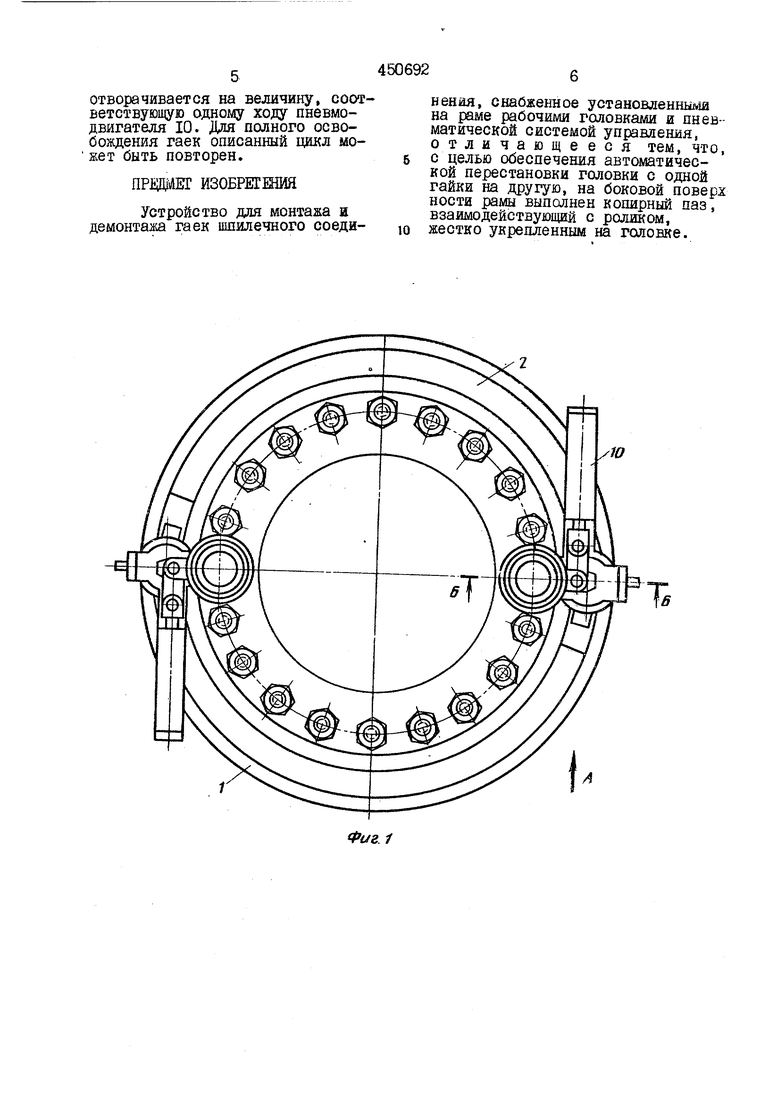
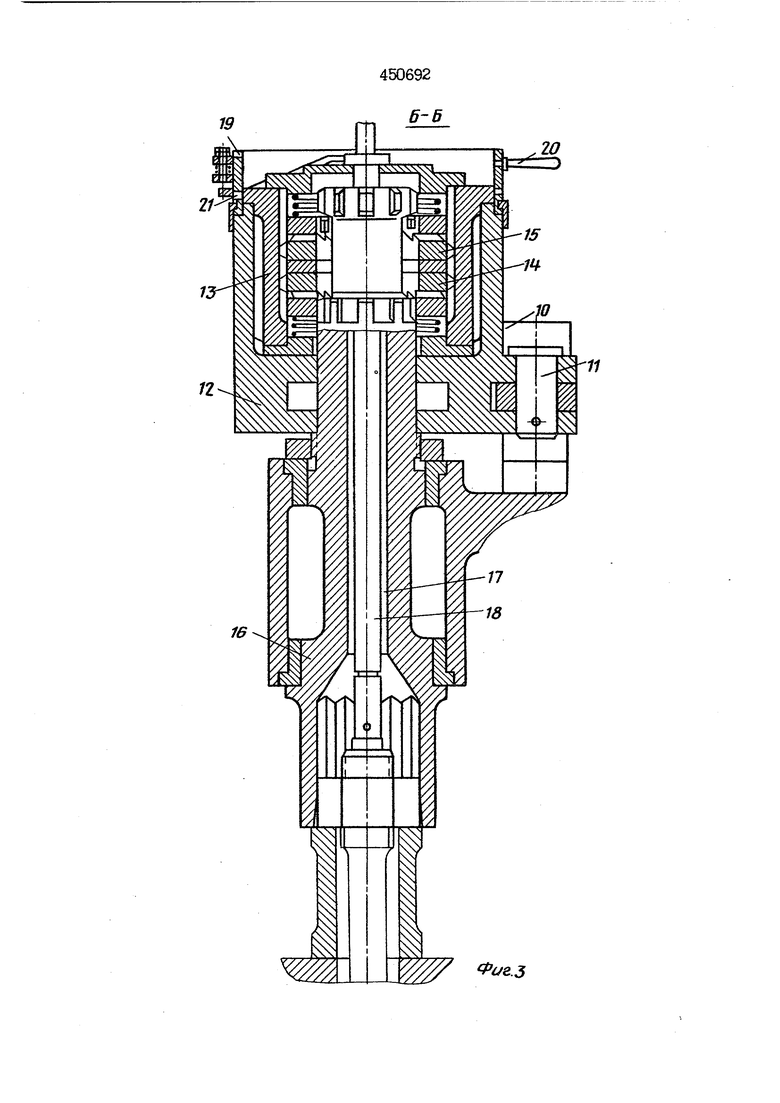
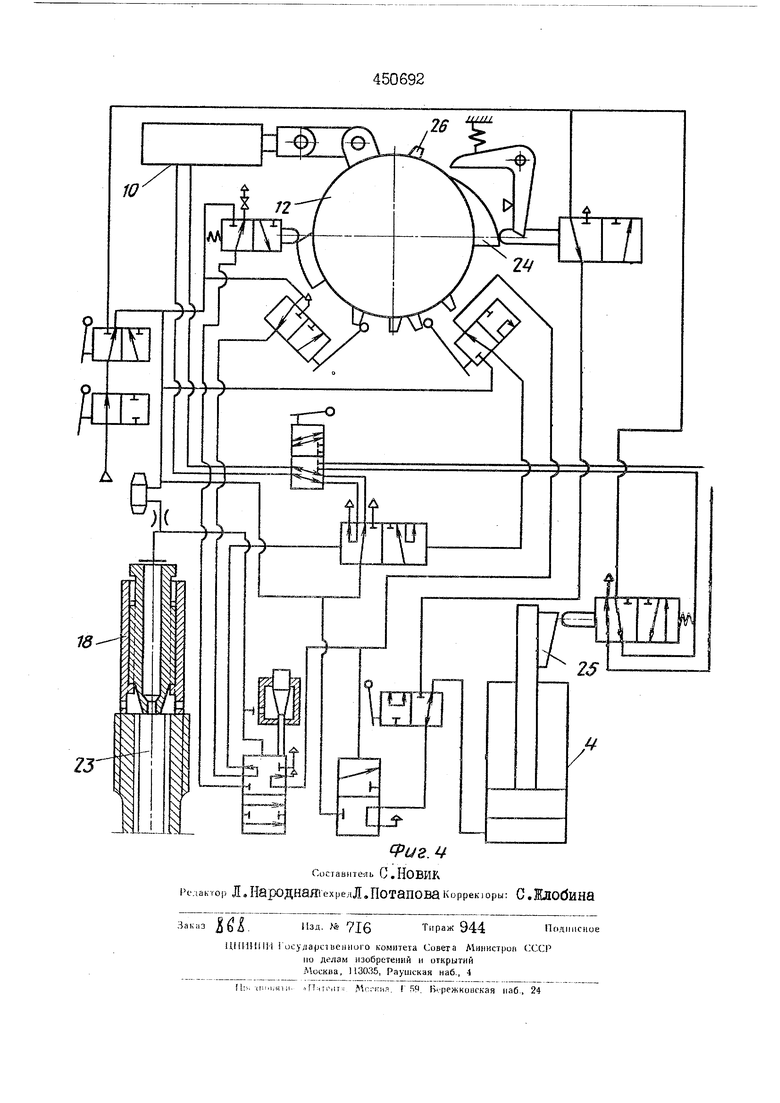
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид на стрелке А на фиг.1; на фиг.З сечение по Б-Б на фиг.1; на фиг.4пневматическая схема устройства.
Устройство содержит несущую
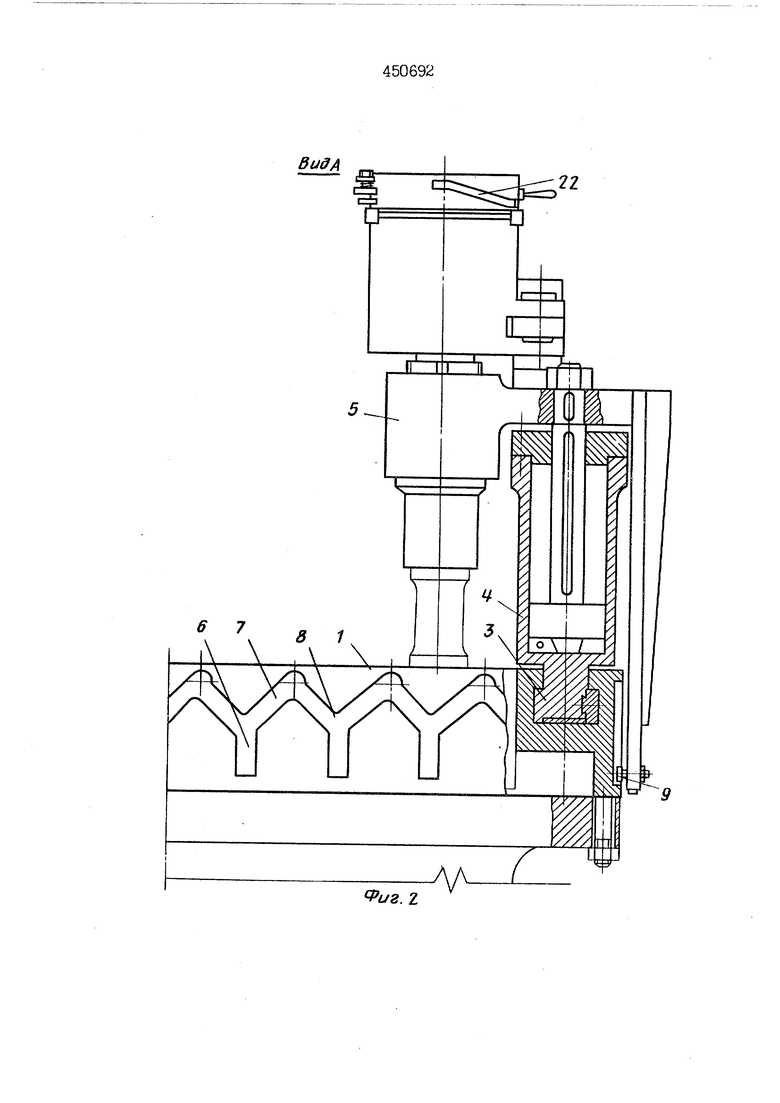
раму I, имеющую в верхней части паз 2, в котором перемещается башмак 3. К последнему крепится пневмоцилиндр 4 сервомотора, который является опорой рабочей головки 5.
На боковой поверхности рамы
Iвыполнен копирный паз, состоящий из вертикальных 6 и наклонных 7 и 8 участков. В этом пазу может перемещаться ролик 9, закрепленный на кронштейне пневмоцилиндра 4.
На рабочей головке 5 установлен реверсивный пневмодвигатель 10 возвратно поступательного действия, соединенный посредством оси
IIс корпусом 12. Во внутренней полости последнего расположен стакан 13, который соединен с корпусом 12 птицами. На внутренней поверхности стакана i3 имеются шлицы, по которым могут перемещаться храповые шестерни 14 и 15, связанные шлицами с хвостовиком ключа 16. В
последнем имеется канал 17, где
асположен датчик 18 удлинения пильки. Храповые шестерни 14 и Ib ходят в зацепление с ключом. 16 почередно соответственно при монтае и демонтаже гаек.
Переключение шестерен выполяется следующим образом. Верхняя асть 19 корпуса 12 может повораиваться с помощью рукоятки 20. ри этом бобышки 21 перемещаются пазах 22, а стакан 13 - в вертикальном направлении и выводит из зацепления одну из шестерен, одновременно вводя в зацепление другую.
Система автоматического управления содершт переключатели, ЗОЛОТШ1КИ, краны, дроссель и другие элементы, а также датчик dS. При зат-яжке на все шпильки предварительно навертываются гайки, а внутрь полой шпильки устанавливается шток 23, копиры 2426 управляют работой элементов пнешлосистемы.
Устройство работает следующим образом. Рама I с установленными на ней рабочшли головками 5 крепится на ремонтируемом агрегате. Ключ 16 устанавливается на гайку, и в зацепление с ключом вводится храповая шестерня 14.
При подаче воздуха в систему шток пневмодвигателя 10 перемещается и повбрачивает корпус 12, который через стакан 13 и храповую шестерню 14 передает крутящий момент ключу 16. При завершении хода пневмодвигателя 10 упоры на корпусе 12 переключают подачу воз-духа на обратный ход пневмодвигателя. Пневмодвигатель возвраща.ется в исходное положение и поворачивает корпус 12 также в исходное положение.
Далее автоматически пневмодвигатель повторяет рабочие циклы до тех пор, пока зазор между торцом штока 23, ввернутого в шпильку, и соплом датчика 18 не достигнет заданной величины. При этом давление в магистрали за дросселем падает, что дает сигнал на реверс пневмодаигателя и одновременную подачу воздуха в цилиндра 4 сервомотора, который поднимает рабочую головку 5. Ролик 9 движется вначале по вертикально участку 6 копирного паза. Длина этого участка выбрана так, что к моменту достижения роликом 9 наклонного участка 7 нижний торец ключа
16 располагается выше верхнего торца шпильки.
1уалиндр 4 продолжает подъем рабочей головки 5, рожк 9 переходит на наклонный участок 7 копирного паза и перемещает башмак
3вдоль паза 2 на расстояние, равное половине шага шпилек. В этом положении рабочая головка 5 удерживается давлением воздуха в сервомоторе до завершения обратного хода пневмодвигателя 10, после чего подача воздуха в цилиндр 4 сервомотора прекращается. Рабочая головка 5 под действием собственного веса опускается. При этом ролик 9 попадает на наклонный участок 8 копирного паза и при дальнейшем опускании рабочей головки переменяет ее на расстояние равное половине шага шпилек.
Участок 8 выполнен так, что к моменту выхода ролика 9 на следующий вертикальный участок 6 ключ 16 располагается над следующей шпилькой. Рабочая головка Б под действием собственного веса продолжает опускаться, и ключ 16 садится на следуюиую гайку. При этом сопло датчика 18 перекрывается штоком 23, ввернутым в очередную шпильку, и цикл повторяется,
При демонтаже гаек устройство работает следующим образом. Воздух поступает в пневмодвигател 10, который совершает ход назад. Корпус 12 через стакан 13, храповую шестерню 15 поворачивает ключ 16, отворачивая гайку. Копир 24, установленный на корпусе 12, обеспечивает подачу воздуха в цилиндр
4сервомотора. Рабочая головка 5 поднимается в крайнее верхнее положение, одновремершо перемещаясь вдоль рамы 1 на расстояние, равно половине шага шпилек. При этом копир 25, соединенный с рабочей головкой 5, реверсирует пневмодвигатель 10, включая его на обратный ход. В конце этого хода копир 26 на корпусе 12 нажимает
на рычаг защелки 27, перекрывая подачу воздуха в.полость цилиндра 4 сервомотора.
Рабочая головка 5 под действием собственного веса опускается и описанным выше способом устанавливается ключом 16 на следующую гайку. При этом копир 25 реверсирует пневмодвигатель.
Таким образом, каждая гайка
отворачивается на величину, соответствующую одному ходу пневмодвигателя 10. Лш полного освобождения гаек описанный цикл может быть повторен,
ПРВДДЕГ ИЗОБРЕТЕНИЯ
Устройство дан монтажа и демонтажа гаек шпилечного соединеная, снабженное установленны ш на раме рабочими головками и пневматической системой управления, отличающееся тем, что, с целью обеспечения автоматической перестановки головки с одной гайки на другую, на боковой поверх ности рамы выполнен копирный паз, взаимодействующий с роликом, жестко укрепленным на головке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
| Устройство для загрузки сырых покрышек в пресс-формы вулканизаторов | 1974 |
|
SU514729A1 |
| Устройство для обработки внутренних поверхностей | 1983 |
|
SU1162574A1 |
| Гайковерт для монтажа на валки подушек с подшипниками и их демонтажа | 1989 |
|
SU1743781A1 |
| ИНСТРУМЕНТ ДЛЯ МОНТАЖА-ДЕМОНТАЖА РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 2004 |
|
RU2274542C1 |
| Устройство для автоматического нарезания внутренней резьбы | 1972 |
|
SU477795A1 |
| Приспособление к карусельному, токарному и другим станкам для обработки криволинейных поверхностей | 1936 |
|
SU50602A1 |
| Гидравлический рычажный ключ | 1982 |
|
SU1054040A1 |
| ГИДРАВЛИЧЕСКИЙ КЛЮЧ ДЛЯ МОНТАЖНЫХ РАБОТ | 1996 |
|
RU2104146C1 |
| Гидродомкратный блок для проведения ремонтно-восстановительных работ по замене устьевого оборудования скважин | 2022 |
|
RU2780181C1 |
ВидА иг. г
6-6
20
11
иг.З
