При стрельбе по движущимся целям, для определения данных для стрельбы, до сих пор обыкновенно применялись приспособления, которые, принимая в расчет скорость и направление движения цели, пользовались для этого определенными на глаз значениями для этих факторов. Вследствие этого, данные для стрельбы, определенные при помощи упомянутых известных приспособлений, смотря по степени точности указанных определений на глаз, оказываются более или менее неточными.
Далее, для обстреливания аэропланов, предложено приспособление, которое при определенной установке двух визирных подзорных труб, пользуясь рядом формул, пытается определить данные, необходимые для установки орудия в горизонтальном и вертикальном направлениях. Скорость и высота полета аэроплана принимается при этой системе как постоянные, а направление движения - как прямолинейное.
Настоящее изобретение выбирает новый путь в том смысле, что оно, как промежуточные данные для точного определения установки орудий в горизонтальном и вертикальном направлениях, сначала определяет и, в случае надобности, и показывает скорость и направление движения цели.
Согласно настоящему изобретению применяются механические, электрические и гидравлические приспособления с таким расчетом, что они, при беспрерывном устанавливании соответственно текущим точно измеряемым значениям для расстояния, направления цели и собственного движения, автоматически определяют и, в случае надобности, и показывают скорость и направление цели, как промежуточные данные. С этими приспособлениями соединена система передачи, которая рассчитана таким образом, что она для любого момента времени из упомянутых промежуточных данных точно определяет необходимые для установки орудий в вертикальном и горизонтальном направлениях поправки. С приборами, указывающими скорость и направление движения противника, рекомендуется, кроме того, соединить еще вспомогательную систему передачи таким образом, чтобы эта система, будучи раз установлена соответственно значениям для расстояния, направления цели и собственного движения и, находясь под влиянием упомянутых указательных приборов для данных о противнике, определяла необходимые для стрельбы установки. Целесообразно будет соединить с этой вспомогательной системой приспособление, устанавливающееся соответственно собственному движению корабля - лучше всего приспособление, основанное на действии волчка таким образом, чтобы каждое изменение курса автоматически передавалось бы означенной вспомогательной системе.
Одно из существенных преимуществ новой системы состоит прежде всего в том, что она, кроме высокой точности при беспрерывном определении данных для стрельбы, еще дает возможность продолжать стрельбу и в том случае, когда цель временно исчезает из вида или если отдельные части главной установки пришли в негодность. В этом случае можно воспользоваться вспомогательной системой, которой сообщаются установки последних измеренных значений для расстояния, направления цели и собственного движения, а также последних вычисленных отсюда данных скорости и направления движения противника. Благодаря этому и в этом случае еще обеспечена большая вероятность попаданий. При желании, можно пользоваться вспомогательной системой также одновременно с главной системой. Она служит тогда для проверки данных, определенных для установки орудий в горизонтальном и вертикальном направлениях, а также для необходимых поправок.
Изобретение основывается на математических выводах, которые привели к следующему результату.
Курсовой угол и скорость движения цели могут быть определяемы, как тригонометрические функции, из следующих доступных точному измерению величин: из скорости собственного движения, из расстояния или времени полета и из бокового направления. Измеренное расстояние должно быть постоянно поправляемо в зависимости от изменения этой величины в течение времени и таким же беспрерывным поправкам подлежит и боковое направление в соответствии с постоянным его изменением.
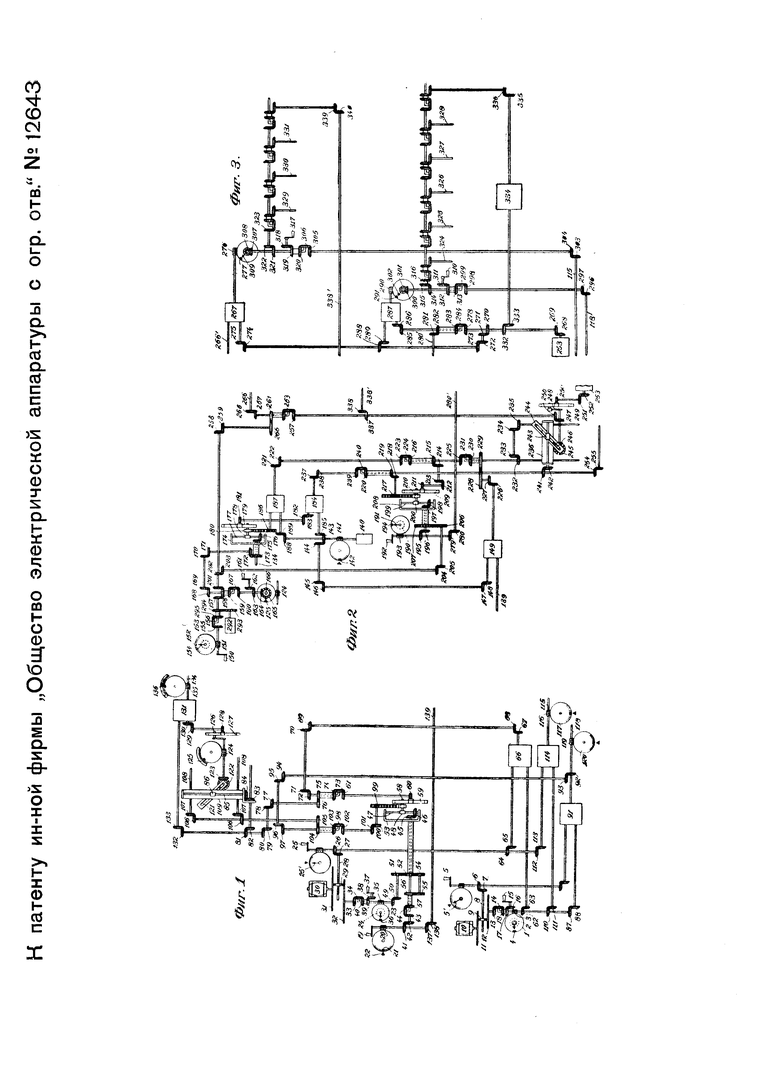
На фигурах 1, 2 и 3 показан пример выполнения настоящего изобретения. Фиг. 1 изображает приспособление для определения поправок расстояния и бокового направления курсового угла и скорости движения цели. На фиг. 2 показано приспособление для определения расстояния, поправок расстояния, бокового направления и поправок бокового направления. Фиг. 3 показывает приспособления для соединения поправочных данных, и дальнейшие улучшения полученных с приспособлений на фиг. 1 и 2.
На фиг. 1 с места, откуда производятся измерения, указатель 1 беспрерывно устанавливается посредством системы 2 соответственно расстоянию цели. Вспомогательный указатель 4, приводимый в движение посредством червяка 3, совмещается при помощи рукоятки 5 с главным указателем 1. Дело в том, что при вращении рукоятки 5 фрикционный валик 9 при помощи передачи 6, 7 и стержня 8, устанавливается так, что движение мотора 10 направляется через фрикционную передачу 11, 9, 12, таким образом, что вспомогательный указатель 4 при помощи передачи 13, 14, постоянно совмещается с указателем 1. При помощи рукоятки 15 через передачу 16, 17, 18, 14, производится первоначальная установка вспомогательного указателя 4.
Посредством рукоятки 19 и червяка 20 другой вспомогательный указатель 21 устанавливается по неподвижной отметке 22 соответственно собственной скорости движения. Далее указатель 23 при посредстве системы 24 передвигается с наблюдательного пункта в соответствии с боковым направлением. При помощи рукоятки 25 через передачу 26, 27, 28, фрикционный валик 29 устанавливается так, что мотор 30 путем фрикционной передачи 31, 29, 32, передачи 33, 34 и червяка 35 совмещает вспомогательный указатель 36 с указателем 23. Посредством рукоятки 37 и передачи 38, 40, 34, 35 вспомогательному указателю 36 дается первоначальная установка. Установленные при помощи рукояток 5 и 25 скорости показываются на шкалах 5 и 25.
При помощи передачи 41, 42, 43, 44, 45, 46, 47 скоба 53 и вместе с нею камень 48 поворачиваются в соответствии с боковым направлением и одновременно через передачу 52, 54, 55, 56, 57, 44, 45, 46, 47, камню 48 сообщается движение, которое нейтрализирует перемещение его, вызванное поворотом скобы 53. Камень 48 заходит цапфой в расположенные перпендикулярно друг к другу кулисы 58 и 59 и соответственно их перестанавливает. Зубчатая рейка кулисы 59 передает свое движение частям передачи 60, 61.
Одновременно таким же образом передается расстояние помощью передачи 62, 63 и выходная скорость помощью передачи 64, 65 на мультипликационную передачу 66 и отсюда уже по передаче 67-73 соединяются с движением передачи 61. Вследствие этого, передача 74-86 движется в соответствии с разницей движения.
С другой стороны, через передачу 87, 88 передается расстояние, а через передачу 89, 90 - изменение расстояния в единицу времени, на мультипликационную передачу 91. Результат соединяется при помощи передачи 92-96 с передаваемым через кулису 58 и передачу 99-102 движением и сообщается путем нерву дачи 103-109 камню 86.
Одновременно на мультипликационную передачу 114 переводится по передаче 110, 111 функция расстояния, а по передаче 112, 113 - выходная скорость. Вал 115 дает боковую поправку для движения, которая показывается вспомогательным указателем 117, приводимым в движение червяком 116. Определенный при помощи мультипликационной системы 91 результат для поправок расстояния сообщается путем вала 118 и червяка 119 вспомогательному указателю 120.
Камень 86 заходит во вращающуюся кулису 121. Установка кулисы 121, отвечающая углу движения противника, передается по передаче 122-124 на шкалу 125 и на кривошип 126. Цапфа кривошипа 126 заходит в кулису 127, движение которой передается по частям системы 128-130 на мультипликационную передачу 131 переводится движение части 74 путем передачи 75-80 и 132, 133. Результат сообщается при помощи вала 134 и червяка 135 вспомогательному указателю 136 и соответствует движению противника.
Собственное движение, устанавливаемое вспомогательным указателем 21 переводится по передаче 137-139 в изображенную на фиг. 2 часть системы.
На фиг. 2 в случае исчезновения из вида цели приводится в движение часовой механизм 140, который через червяк 141 при помощи указателя 142 показывает время. По передаче 143-148 этот фактор времени сообщается мультипликационной передаче 149, которой, кроме того, через вал 139 передается собственная скорость; при помощи рукоятки 150, червяка 151 и вспомогательного указателя 152 одновременно устанавливается показанное системой 153, 154 значение бокового угла и по передаче 155-159 придается установленному помощью вспомогательного указателя 125 (фиг. 1) посредством рукоятки 161 и передачи 160, 162-165, указателю 166. Соответственно этой сумме при помощи передачи 167-173 поворачивается скоба 174, между тем как при посредстве вала 134 и передачи 175 176, 177 камень 178 устанавливается в соответствии со скоростью противника. Последний заходит в кулисы 179 и 180. Зубчатая рейка кулисы 179 передает свое движение по передаче 181-183 на мультипликационную передачу 184, которой при помощи передачи 185 сообщается движение часового механизма. 140. Кулиса 180 сообщает свое перемещение посредством передачи 186 мультипликационной передаче 187, которая при помощи передачи 188, 189 также принимает движение часового механизма 140. Кроме того, расстояние, показанное системой 190 при помощи указателя 191, устанавливается вращением рукоятки 192, через червяк 193 и вспомогательный указатель 194 и передается по передаче 195-199 камню 200.
При установке рукоятки 150 движение ее передано по передаче 155-158, 201-207 на скобу 208. Камень 200 заходит в кулисы 209, 210. Кулиса 209 передает свое движение передаче 211-216. Кулиса 210 перестанавливает части передачи 217-220. Движение передачи 209 сообщается вместе с переданным передачей 221-223 результатом мультипликационной передачи 187 передаче 224, 225. Движение части 225 соединяется при посредстве частей 226-230 с результатом части 149 и по частям 231-235 сообщается салазкам 236. Одновременно результат передачи 184 сообщается по частям 237-239 вместе с движением части 320 передаче 240-242 и камню 243. Этот камень заходит в вращающуюся кулису 244, которая передает свое движение при помощи передачи 245-247 на кривошип 248. Цапфа этого кривошипа заходит в синусовую кулису 249, которая по передаче 250-252 сообщает свое перемещение мультипликационной передаче 253. Эта последняя, кроме того, передвигается при помощи передачи 254, 255 соответственно движению части 240. Установка кулисы 244, или же части 247, сообщается по частям 256, 257 вместе с движением части 201, при помощи передачи 258-262 частям 263-266, и этим самым и мультипликационной передаче 267. Передача 267 принимает по частям 268-275 результат передачи 253 и в итоге дает боковую поправку, которая по червяку 276 передается на вспомогательный указатель 277 (фиг. 3). Результат передачи 253 сообщается по частям 268, 269, 278 вместе с переданным при помощи частей 279-283 движением рукоятки 192 частям 284-286 и этим самым и мультипликационной передаче 287.
Следует еще упомянуть, что при изменении направления собственного движения, при помощи компасного прибора 292 по частям передачи 293-295, сообщается передаче 156 соответствующее добавочное движение.
На фиг. 3, в случае видимой цели, движение вала 118 (фиг. 1) передается при помощи частей 296-301 на указатель 302, показывающий поправку расстояния при движении. Движение вала 115 передается помощью передачи 303-308 на указатель 309, показывающий боковую поправку.
В случае исчезновения цели, если приспособления, показанные на фиг. 1 будут продолжать находиться в действии, показания будут не правильные.
Чтобы предотвратить это, для поправок расстояния поворачивается рукоятка 310 таким образом, что при посредстве передачи 311-313, 299-301 указателю 302 дается добавочное движение, вследствие чего он будет совмещаться со вспомогательным указателем 291; этим достигается, что правильная поправка расстояния при помощи передачи, 314, 315 передается на часть 316. Подобным образом путем поворачивания рукоятки 317, при посредстве передачи 316-320, 306-308 сообщается указателю 309 добавочное движение, вследствие чего он будет совмещаться со вспомогательным указателем 277. Следствием этого является то, что переданное передачей 321 частям 344, 323 движение будет соответствовать правильной боковой поправке.
По известным самим по себе способам с определенными из обстоятельств движения поправками можно еще соединять добавочные улучшения. При помощи 324, 325, 326, 327, 328 можно присоединить к поправкам расстояния еще поправочные факторы для изменений начальной скорости, температуры пороха, атмосферных влияний, ветра и поправки по наблюдениям разрывов.
При помощи вала 329-331 можно присоединить к боковым поправкам еще поправки в отношении вращения снаряда, ветра и наблюдения разрывов.
Далее можно при помощи 332, 333 (фиг. 3) передачи 334 и передачи 335, 336 присоединить еще соответствующий расстоянию угол возвышения. Подобным образом можно при помощи передачи 337-340 соединить боковой угол с боковой поправкой.
Изображенное на фиг. 2 приспособление может быть применено и таким образом, что данные для предстоящей стрельбы определяются и устанавливаются заранее и огонь открывается по прошествии предусмотренного промежутка времени.
Определенные таким образом данные могут быть передаваемы при помощи системы передачи к орудиям или т.п.
Прибор управления артиллерийским огнем при стрельбе по подвижной цели с подвижной платформы, получающий извне текущие данные, а в случае перерыва в подаче таковых продолжающий работать по задаваемым данным движения противника, характеризующийся совокупным применением а) агрегата 1-18, предназначенного для посылки дальности и скорости сближения в остальные части прибора помощью передач 62-63, 110-111, 87-88 и 89-90 и согласующего предлагаемую скорость сближения, устанавливаемую на циферблате 5 рукояткою 5 и умножаемую на множительном фрикционном приборе 8-13 на время, с истинной скоростью сближения помощью сравнения изменения дальности, получаемого, как произведение устанавливаемой скорости на время, с изменением дальности, получаемым с дальномера на стрелку 1, б) агрегата 23-40, предназначенного для выработки «своего курсового угла» и состоящего из циферблата 25′, на котором рукояткою 25 устанавливают предполагаемую «свою угловую скорость», умножаемую на фрикционном приборе 28-32 на время, с целью поверки по полученному произведению и действительному получаемому извне курсовому углу правильности устанавливаемой «своей угловой скорости» перед посылкой ее в остальные части прибора, по передачам 64-65 и 112-113; в) агрегата 19-22 и 41-58, получающего извне «свою скорость», а с агрегата 23-40 «свой курсовой угол» и состоящего из поворачиваемой на «свой курсовой угол», помощью передачи 51-52, скобы 53 с камнем 48, передвигаемым на величину «своей скорости» и ведущим рейки 58 и 99 соответственно продольной и боковой слагающим скорости для использования их в прочих частях прибора; г) агрегата 59-61, 63, 65-86, предназначенного для получения боковой слагающей скорости противника, как разности между общей боковой скоростью, являющейся произведением дальности на свою угловую скорость и получаемой на множительном приборе 66, и «своей боковой слагающей скорости», получаемой с рейки 99, и каковая боковая слагающая скорость противника передается через диференциал 71-76 с одной стороны на камень 86, помощью 77-84 и винта 85, а с другой стороны через 132-133 в другие части прибора; д) агрегата 88, 90-109, предназначенного для получения продольной слагающей скорости противника по скорости сближения (получаемой от агрегата 1-18) и продольной слагающей «своей скорости», из каковых скорость сближения передается через 90, 92-97, а слагающая «своей скорости» через 100-101 на диференциал 102-105 и затем через 106-107 скобе 109; е) агрегата 121-136, предназначенного для получения скорости и курсового угла противника и состоящего из линейки 121, вращающейся около оси колеса 122 и устанавливаемой перемещением скобы 109, на продольную слагающую скорость противника, а перемещением камня 86 на боковую слагающую, в результате чего на линейке 121 между осью колеса 122 и камнем 86 получается скорость противника как по величине, так и по направлению, определящему курсовой угол противника, читаемый на циферблате 125 передаваемый далее, валиком 124 и позволяющий по полученной с агрегата по пункту боковой слагающей скорости противника определить, помощью 126-131, скорость противника, читаемую на циферблате 136 и передаваемую далее валиком 134; ж) агрегате 150-177, 292-293, предназначенного для получения составляющих скоростей в относительном движении по сумме «своего курсового угла» и курсового угла противника, из коих первый устанавливается рукояткой 150 по циферблату 153 по агрегату 23-40, а второй рукояткой 161 по циферблату 166 с агрегата 121-36, каковая сумма устанавливается на разлагающем скорость противника приспособлении 173-177; з) часового механизма 140-143 с циферблатом 142, предназначенного для введения множителя «время» в прочие части прибора; и) агрегата 190-208, предназначенного для разложения текущей дальности на составляющие по направлению «своего курса», устанавливаемого по дальности рукояткою 192 и снабженного скобою 208 с камнем 200, из коих камень устанавливается по дальности диференциалов 195-198, а скоба по «своему курсовому углу» через передачу 203-206 и тот же диференциал; к) агрегата 139, 144-149, 186-189, 209, 211-216, 221-236, предназначенного для получения упрежденной дальности по направлению «своего курса» и состоящего из множительного прибора 149, дающего произведение из «своей скорости» на время, получаемое через 144-148, прибора 187, дающего произведение из соответственной продольной слагающей скорости противника, получаемой от 186, на время от 188, и диференциалов 215, 216, 223, и 225, 230, 231, суммирующих упомянутые произведения с продольной слагающей дальности, получаемой через 211-214, с целью установки найденной упрежденной дальности на суммирующем приборе 236-247; л) агрегата 179, 181-185, 210, 217, 220, 237-243, предназначенного для получения упрежденной дальности, по направлению, перпендикулярному к «своему курсу» стоящего из прибора 184, дающего произведение времени на соответственную слагающую скорость противника, и диференциала 220, 239-240, перемещающего камень 243 по скобе 236; м) агрегата 244-247, 257-266, предназначенного для получения бокового упреждения и состоящего из линейки 244, вращающейся около оси колеса 245, управляемой камнем 243 на скобе 236, дающей упрежденное направление в посылающей его к диференциалу 257, 261, 263 для составления разности между углом, составляемым упрежденной дальностью с «своей скоростью», и «своим курсовым углом», каковая разность и дает боковое упреждение; н) агрегата 248-256, 268-269, получающего продольную слагающую упрежденной дальности и угол, составляемый упрежденной дальностью со «своей скоростью», предназначенного для получения упрежденной дальности и состоящего из скобы 249, строящей синус названного угла, с передачей 250-251, и прибора 253, дающего по упомянутым слагающей и синусу упрежденную дальность, посылаемую валиком к другим частям прибора; н) агрегата 267, 273-277, предназначенного для построения линейной боковой поправки по дальности, получаемой от агрегата 248-256 и разности углов, дающей боковое упреждение, и состоящего из множительного прибора 267 и циферблата со стрелкой 276-277 для совмещения со стрелкой 309; п) агрегата 305-309, 317-323, 329-331, 338-340, предназначенного для нахождения общей боковой установки по данным, сообщаемым по 276, по 115 и по 338 и от разных корректурных установок 329-331, и состоящего из ряда диференциалов слагающих поправки, и общего диференциала 305-306, 320 с рукояткой 317 для сведения необходимого баланса совмещением стрелок 309 и 277, и р) агрегата 270-273, 278-291, 296-302, 310-328, 332-336, предназначенного для получения общей установки в дальности, получающего данные: упрежденной дальности через валик с колесами 332 и 333, текущую дальность 280, скорость сближения по 118 и разные поправки по 324-328, и состоящего из диференциала 278, 282-284, получающего упреждение в дальности, прибора 287, переводящего упреждение в зависимости от упрежденной дальности в установку прицела, ряда диференциалов 298-299, 312, 324, 325 и им подобных, вводящих разные корректуры, и рукоятки 310 для совмещения стрелок 291 и 302 для сведения баланса.
