.1, Изобретение относится к способам аварийной связи и радиоопределения координат на базе космической техни ки, используемой при поиске и спасеНИИ людей, терпящих бедствие в море Уже известен способ, определения помощью ИСЗ координат аварийной радиостанции, когда для связи используют два последовательных фазоманипулировайных сигнала, а для радиоопределения - интегрированные скорости изменения расстояния между ИС и аварийной радиостанцией на подвижном объекте. Известный способ требует примене сложного приемного и передающего обО1эудования.. Целью изобретения является обеспечение возможности одновременной работы нескольких аварийных радиостанций в общей полосе частот и пов шение энергетической эффективности системы аварийной связи. Для этого по предлагаемому спосо бу составляют сумму двух последовательных фазоманипулированных сигналов, измеряют временное положение этой суммы, а скорость изменения ра стояния между ИСЗ и аварийной радио станцией на подвижном объекте вычис ляют по данным измерений временного полйжения суммы двух последовательных фазоманипулированных сигналов и по известным элементам орбиты спутника. Передача сообщений производится следукядим образом. Передаваемое сообщение представляют в дискретной форме в виде последовательности символов двух видов, один из которых отображается первой кодовой последовательностью, другой вид - второй кодовой последовательностью. На береговой станции прин; тые через ИСЗ сигналы усиливгиотся и обраба.тываются с помощью двух фильтров, согласованных с каждым сигналом, затем детектируются и демодулируются методами некогерентного приема1 дискретных сообщений. Дпя определения места объекта, терпящего бедствие, на береговой станции следят за временным положением пpинимae e rx сигналов. С этой целью сигналы после прохождения через согласованные фильтры детектируются и складываются, н результате чего образуется непрерывная периодическая последовательность видеоимпульсов Иеэавискмо от того, передается ли сообщение, или сигналы не модулируются никаким сообщением.
Координаты аварийной радиостанции вычисляются путем интегрирования текущей скорости изменения расстояния между ИСЗ и аварийной радиостанцией.; Значение интеграла указанной величины за период между моментами t и 2 °п рёделяется разность расстояний между объектом и точками, где находился спутник в моменты t и -t , Способы определения координат объекта по нескольким таким разностям расстояний известны.
Возможность одновременной работы двух и более аварийных радиостанций; находящихся в зоне действия одного ИСЗ, обеспечивается тем, что взаимные вредные помехи на выходе согласованного фильтра будут создаваться только п{эи совпадении во времени импульсов на выходе согласованных фильтров при.емйого устройства, полученных от двух или трех аварийных радиостанций. Вероятность этого события мала, так как скважность импульсов на выходе фильтров значительно больше единища Если такое событие и произойдет, то импульсы будут перекрываться только в течение части того интервала времени, когда кешдый из объектов, терпящих бедствие, будет находится в зоне действия одного ИСЗ. Отсчеты навигационного параметра, взятые в указанный интервал времени, могут отбрасываться, и это не лишит береговую станцию возможности определить координаты каждого объекта.
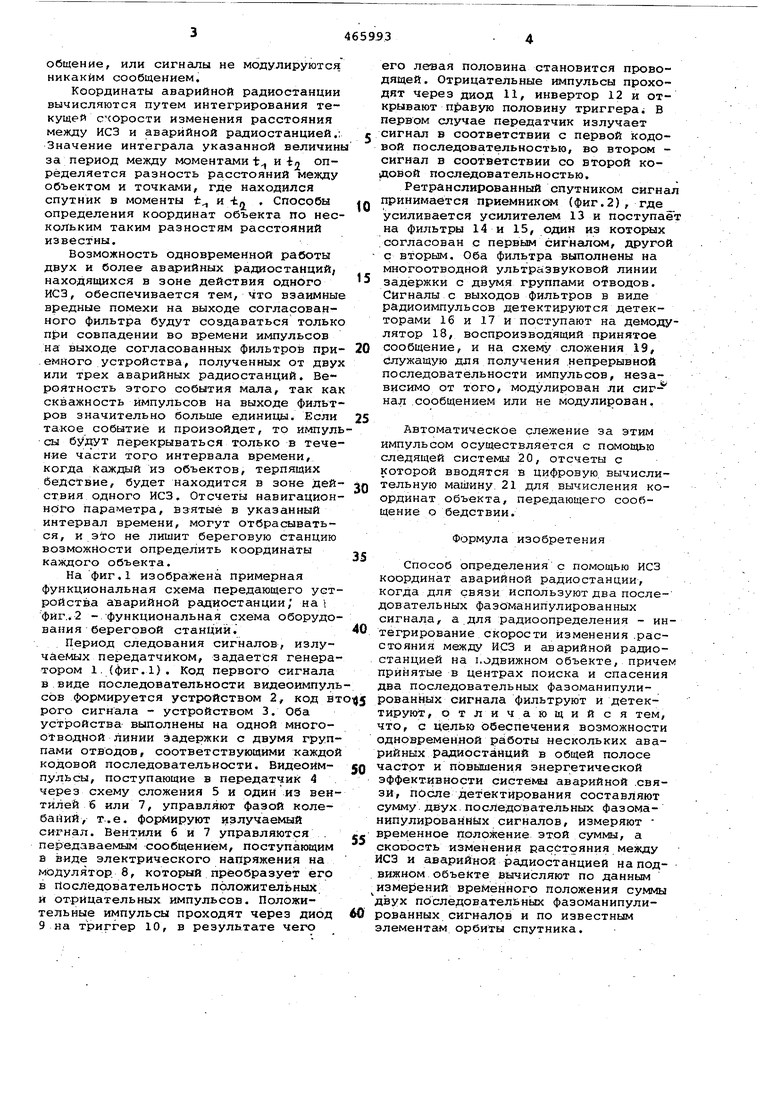
На фиг,1 изображена примерная функциональная схема передающего устройства аварийной радиостанции/ на фиг., 2 - функциональная схема оборудования береговой станции,
Период следования сигналов, излучаемых передатчиком, задается генератором 1.(фиг,1). Код первого сигнала в виде последовательности видеоимпульсов формируется устройством 2, код вт рого сигнала - устройством 3, Оба устройства выполнены на одной многоотводной линии задержки с двумя группами отводов, соответствующими каждой кодовой последовательности, Видеоймпульсы, поступающие в передатчик 4 через схему сложения 5 и один из вентилей 6 или 7, управляют фазой колебаний, т.е, формируют излучаемый сигнал. Вентили 6 и 7 управляются . передаваемым сообщением, поступающим в виде электрического напряжения на модулятор. 8, который преобразует его в 11осЛ(едовательность положительных; и отрицательных импульсов. Положительные импульсы проходят через диод 9 на триггер 10, в результате чего
его левая половина становится проводящей , Отрицательные импульсы проходят через диод 11, инвертор 12 и открывают правую половину триггераi В первом случае передатчик излучает сигнал в соответствии с первой кодовой последовательностью, во втором сигнал в соответствии со второй кодовой последовательностью.
Ретранслированный спутником сигна принимается приемником (фиг,2) , где усиливается усилителем 13 и поступае на фильтры 14 и 15, один из кото|ж1х согласован с первым сигналом, другой с вторым. Оба фильтра выполнены на многоотводной ультразвуковой линии задержки с двумя группами отводов, Сигналы с выходов фильтров в виде радиоимпульсов детектируются детекторами 16 и 17 и поступают на демодулятор 18, воспроизводящий принятое сообщение, и на схему сложения 19, служащую для получения .непрерывной последовательности импульсов, независимо от того, модулирован ли нал .сообщением или не модулирован.
Автоматическое слежение за этим импульсом осуществляется с помощью следящей системы 20, отсчеты с которой вводятся в цифровую вычислительную машину. 21 для вычисления координат объекта, передающего сообщение о бедствии.
Формула изобретения
Способ определенияс помощью ИСЗ координат аварийной радиостанции, когда для связи используют два последовательных фаэОманипулированных сигнала, а.для радиоопределения - интегрирование скорости изменения.расстояния между ИСЗ и аварийной радиостанцией на подвижном объекте, приче принятые в центрах поиска и спасения два последовательных фазоманипулированных сигнала фильтруют и детектируют, о т ли чаю щи и с я тем, что, с целью Обеспечения возможности одновременной рйботы нескольких аварийных радиостанций в общей полосе частот и повышения энергетической эффективности систекщ аварийной .связи, после детектирования составляют сумму.двух последовательных фазоманипулированйЫх сигналов, измеряют временное положение этой суммы, а скооость изменения расстояния между ИСЗ и аварийной радиостанцией на подвижном объекте вычисляют по данным измерений временного положения суммы двух последовательных фазоманипулированных сигналов и по известным элементам орбиты спутника,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2449917C1 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2016 |
|
RU2629000C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2003 |
|
RU2258940C1 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ РАДИОМАЯК | 2010 |
|
RU2438144C1 |
| АВАРИЙНЫЙ РАДИОМАЯК | 1999 |
|
RU2157546C1 |
| АВАРИЙНЫЙ РАДИОБУЙ | 2005 |
|
RU2282870C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО ТРЕВОЖНЫМ РАДИОСИГНАЛАМ | 2002 |
|
RU2263323C2 |
Фиг i
Фи$ 2
