I
Предлагаемый интегрирующий привод относится к области автоматического регулирования и может быть использован в навигационных приборах и вычислительных устройствах непрерывного действия.
Известен интегрирующий привод, содержащий последовательно соединенные датчик входного сигнала, элемент сравнения, усилитель и двигатель, на валу которого установлен тахогенератор. Такой интегрирующий привод имеет недостаточную точность при малых входных сигналах.
Предлагаемый интегрирующий привод отличается от известного тем, что он дополнительно содержит первый ключ, через который выход тахогенератора подключен ко входу элемента сравнения, второй ключ, соединенный со входом элемента сравнения, фильтр и пороговый элемент, связанные с выходом тахогенератора, датчик импульсов, установленный на валу двигателя, дифференциатор, два инвертора, формирователь знака направления вращения, третий и четвертый ключи, источники положительного и отрицательного напряжений и последовательно соединенные формирователь задержанных импульсов, формирователь пилообразного напряжения, вычитатель, пятый ключ, запоминающий элемент, делитель напряжения и сумматор, вход которого через дифференциатор подключен к
15ЫХОДУ фильтра, а выход - к управляющему входу второго ключа, другой вход которого через первый инвертор связан с выходом порогового элемента, соединенного с управляющим входом первого ключа, при этом первый выход датчика импульсов соединен с формирователем задержанных импульсов и с управляющим входом пятого ключа, а второй - со входом формирователя знака направления вращения, выход которого непосредственно связан с управляющим входом третьего ключа и через второй инвертор - с управляющим входом четвертого ключа, источник положительного напряжения через третий ключ, а источник отрицательного напряжения через четвертый ключ соединены со входами формирователя пилообразного напряжения и вычитателя.
Такое выполнение интегрирующего привода обеспечивает повышение точности при малых входных сигналах.
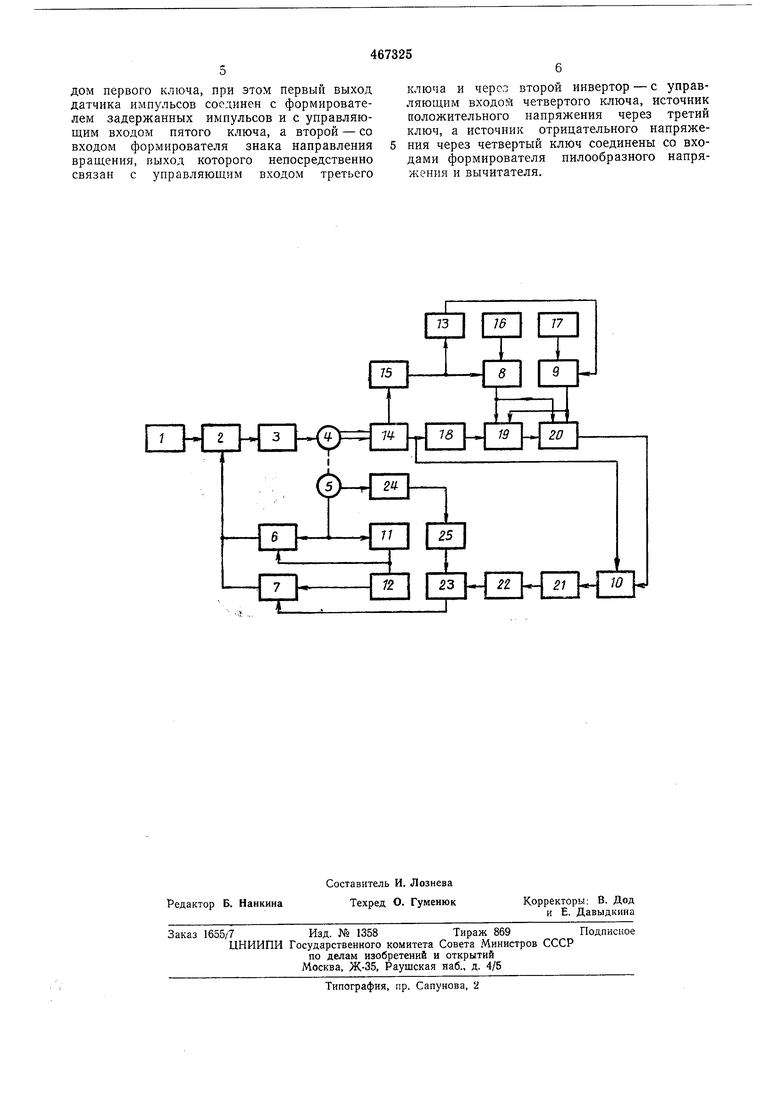
На чертеже изображена блок-схема предлагаемого привода.
Он содержит датчик 1 входного сигнала,
элемент сравнения 2, усилитель 3, двигатель
4, тахогенератор 5, ключи 6-10, пороговый
элемент И, инверторы 12, 13, датчик имиульсов 14, формирователь 15 знака направления
вращения, источник 16 положительного напряжения и источник 17 отрицательного, формирователь 18 задержанных импульсов, формирователь 19 пилообразного напряжения, вычитатель 20, запоминающий элемент 21, делитель напряжений 22, сумматор 23, фильтр 24, дифференциатор 25.
Предлагаемый интегрирующий привод работает следующим образом.
При отсутствии входного сигнала с датчика 1 двигатель-4 неподвижен, датчик импульсов 14 не выдает импульсов, поэтому ключ 10 закрыт, на запоминающем элементе 21 и на делителе 22 напряжение равно О и через сумматор 23 и отпертый ключ 7 поступает на элемент сравнения 2. Так как напряжение тахогенератора 5 меньше порогового, с порогового элемента И снимается запирающий потенциал на ключ 6. Этот потенциал инвертируется на инверторе 12 и становится разрешающим для ключа 7. При поступлении входного сигнала с датчика 1 его напряжение усиливается на усилителе 3 и приводит в движение вал двигателя 4 и тахогенератора 5. До тех пор, пока напряжение тахогенератора 5 меньше установленного порога, выходной потенциал порогового элемента И является запрещающим для ключа 6 и напряжение тахогенератора 5 не проходит через ключ 6. Ключ 7 при этом открыт, и через него на элемент сравнения поступает напряжение с сумматора 23.
На валу двигателя 4 размещен датчик импульсов, который формирует импульсы, частота которых пропорциональна скорости вращения вала двигателя. Кроме того, с датчика импульсов снимаются сигналы, поступающие на формирователь 15 знака направления вращения, который в зависимости от направления вращения вала вырабатывает потенциал положительной или отрицательной полярности. Этот потенциал подается на управляющий вход ключа 8 и на инвертор 13, выход которого соединен с управляющим входом ключа 9.
Таким образом, в зависимости от направления вращения вала открыт только один из ключей 8 или 9, которые осуществляют подключение к источнику 16 положительного напряжения или к источнику 17 отрицательного напряжения формирователя 19 пилообразного напряжения и вычитателя 20. В случае подключения их к источнику положительного напряжения с выхода формирователя пилообразного напряжения снимается положительное линейно нарастающее напряжение, обрыв которого производится импульсами с формирователя 18 задернсанных импульсов. Нарастающее пилообразное напряжение поступает на вычитатель 20, на другой вход которого подано положительное постоянное напряжение с ключа 8. С выхода вычитателя 20 снимается линейно подающее положительное напряжение, поступающее на вход ключа 10. Импульс, поступающий с датчика импульсов 14, отпирает ключ 10, и на запоминающем элементе 21 фиксируется величина напряжения, поступающего с вычитателя 20. Напряжение с запоминающего элемента 21 через делитель напряжений 22 подается на сумматор 23.
В случае изменения направления вращения вала формирователь 19 пилообразного напряжения и вычитатель 20 соединяются с источником отрицательного напряжения через ключ 9 и соответственно на запоминающем
элементе 21 и делителе напряжений 22 получается отрицательное напряжение, величина которого соответствует данной скорости вращения вала. Напряжение тахогенератора 5, пройдя через фильтр 24, освобождается от высокочастотных составляющих и после дифференциатора 25 получается напряжение, характеризующее скорости изменения напряжения тахогенератора. Это напряжение суммируется на сумматоре 23 с напряжением делителя 22 и через ключ 7 подается на элемент сравнения 2. Этим достигается повышение точности при изменении скорости в период между импульсами.
При увеличении скорости вращения вала, когда напряжение тахогенератора становится больше порогового, потенциал с выхода порогового элемента 11 становится разрешающим для ключа 6 и выход тахогенератора через ключ 6 подключается к элементу сравнения 2. Ключ 7 запирается запирающим потенциалом с инвертора 12 и отключает сигнал сумматора 23. При этом работа интегрирующего привода ничем не отличается
от известного.
Предмет изобретения
Интегрирующий привод, содержащий последовательно соединенные датчик входного сигнала, элемент сравнения, усилитель и двигатель, на валу которого установлен тахогенератор, отличающийся тем, что, с целью повышения точности при малых
входных сигналах, он содержит первый ключ, через который выход тахогенератора подключен ко входу элемента сравнения, второй ключ, соединенный со входом элемента сравнения, фильтр и пороговый элемент, связанные с выходом тахогенератора, датчик импульсов, установленный на валу двигателя, дифференциатор, два инвертора, формирователь знака направления вращения, третий и четвертый ключи, источники положительного
и отрицательного напряжений и последовательно соединенные формирователь задержанных импульсов, формирователь пилообразного напряжения вычитатель, пятый ключ, запоминающий элемент, делитель напряжения и сумматор, вход которого через дифференциатор подключен к выходу фильтра, а выход - к управляющему входу второго ключа, другой вход которого через первый инвертор связан с выходом порогового
элемента, соединенного с унравляющим входом первого ключа, при этом первый выход датчика импульсов соединен с формирователем задержанных импульсов и с управляющим входом пятого ключа, а второй - со входом формирователя знака направления враш.ения, выход которого непосредственно связан с управляющим входом третьего
ключа и через второй инвертор - с управляющим входой четвертого ключа, источник положительного напряжения через третий ключ, а источник отрицательного напряжения через четвертый ключ соединены со входами формирователя пилообразного напряжения и вычитателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |
| УСТРОЙСТВО ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2065074C1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРИОД - НАПРЯЖЕНИЕ | 1991 |
|
RU2030108C1 |
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| Устройство для управления ромбическим манипулятором | 1983 |
|
SU1315933A1 |
| Электронный измеритель массы | 1990 |
|
SU1753290A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Импульсный стабилизатор напряжения с плавным запуском | 1987 |
|
SU1464150A1 |
ьш н
