Изобретение относится к автоматическому управлений) и может быть применено в системах управления ромбическим манипуляторами.
Цель изобретения - расширение функциональных возможностей устройства за счет управления неограниченным количеством исполнительных двигателей.
На фиг,1 представлена функциональ- 0 выхода генератора 10. При сравнении нал схема предлагаемого устройства напряжения генератора 10 с входными для управления; на фиг.2 - конкретная напряжениями срабатывают соответстветствует преобразованию входных сиг налов положительной полярности).
Преобразование происходит следующим образом
На неинвертирующие входы соответствующих компараторов 6 поступают управляющие напряжения, на все инвер тирующие входы компараторов 6 через сумматоры 5 подается напряжение с
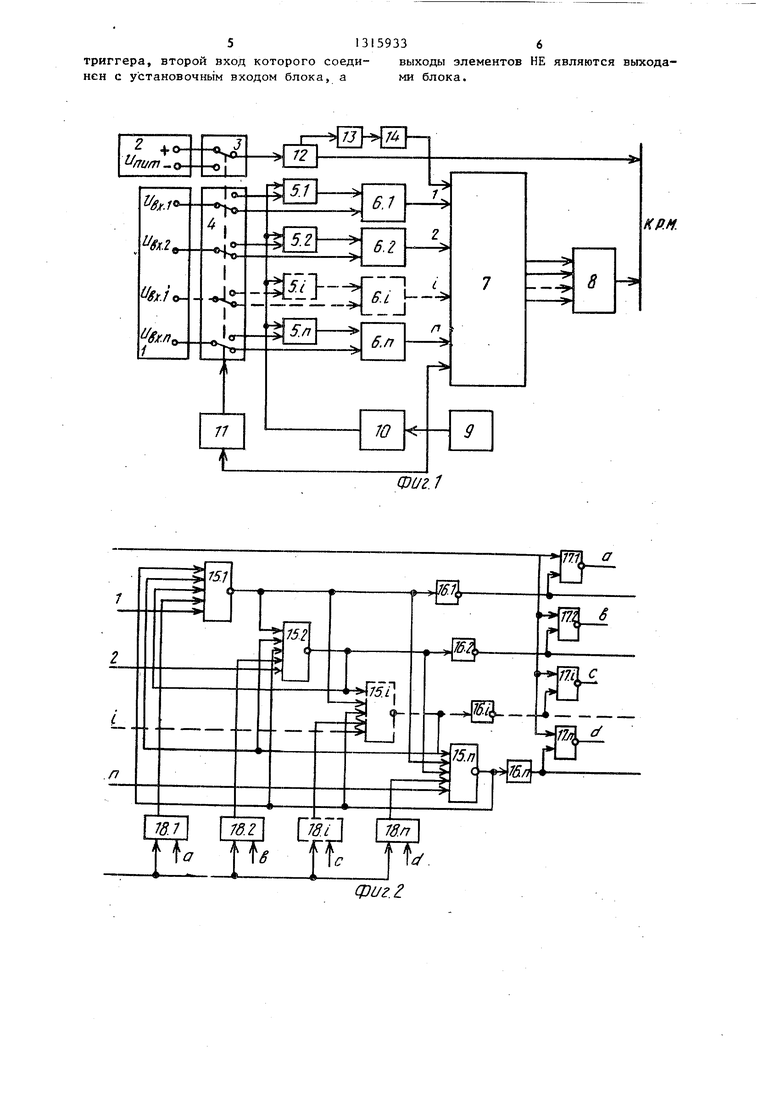
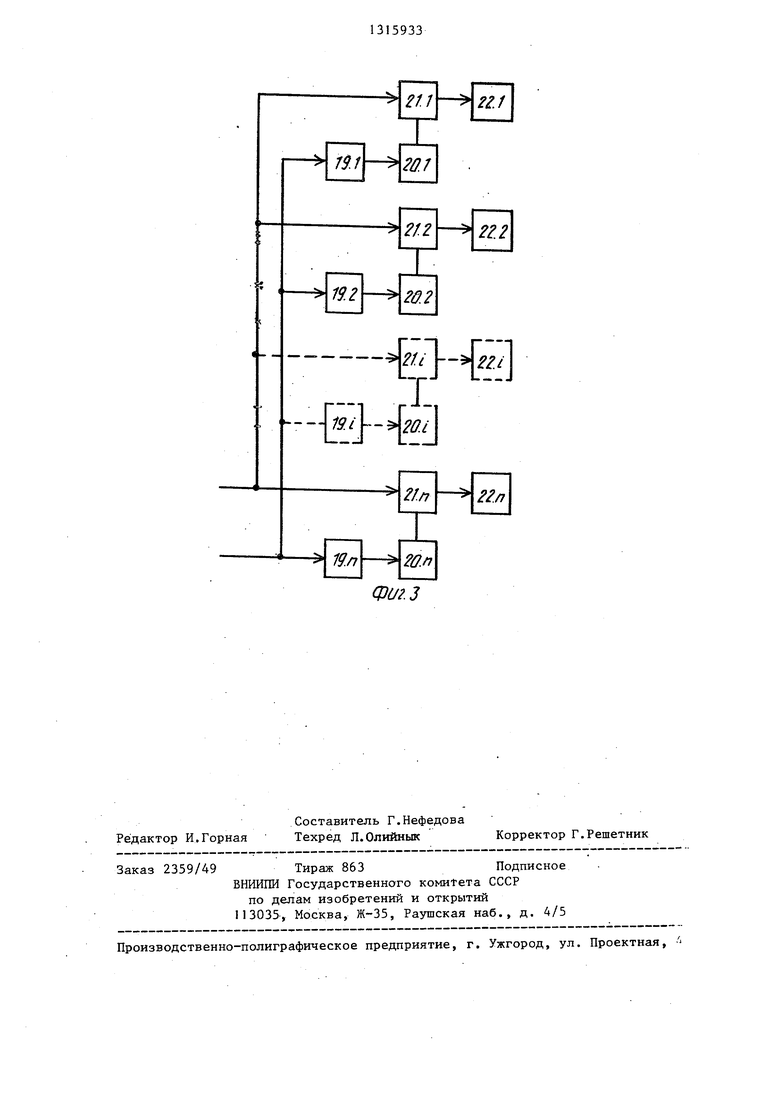
реализация логического блока; на фиг.З - функциональная схема блока управления многодвигательного манипулятора.
Устройство содержит з адатчик , источник 2 питания, ключ 3, коммутатор А, сумматоры 5.1,5.2,..,5п, компараторы 6.1 ,6.2,.., ,6п., логический блок 7, амплитудный модулятор 8, генератор 9 импульсов, генератор 10 пилообразного напряжения, счетчик 11, датчик 12 тока, дифференциатор 13, блок 14 выделения модуля 14.
Логический блок 7 содержит много- .входовые элементы И-НЕ 5 ,1 ,15, 2,, . , 15п, элементы НЕ 16.1,16.2,.,.,16п, двухвходовые элементы И-НЕ 17.1, 17.2,0,.,17п, триггеры 18.1,18.2,.., 18п.
Блок управления многодвигательног манипулятора содержит двухпороговые элементы 19.1 ,19.2,.. . , 19п, апериодические звенья 20.1,20.220п, ти
ристорные усилители 21.1,21.2,..., 2In и исполнительные двигатели (электродвигатели) 22.1,22.2,... ,22п.
Устройство работает следующим образом.
Генератор 9 импульсов вырабатывает короткие импульсы. Каждый импульс генератора 9 запускает генератор 10 пилообразного напряжения, по счетному входу изменяет состояние счетчика 115 -ЧТО приводит к изменению состояния коммутат ора 4 и ключа 3 и устанавливает триггеры 18 логического блока 7 в начальное состояние. После запуска генератора 10 и установки коммутатора 4 и ключа 3 в соответствующее состояние происходит одновременное преобразование входных непрерывных управляющих напряжений одной полярности задатчика 1 во временной интервал (положение коммутатора 4 и ключа 3, указанное на фиг.1, соответствует преобразованию входных сигналов положительной полярности).
Преобразование происходит следующим образом
На неинвертирующие входы соответствующих компараторов 6 поступают управляющие напряжения, на все инвертирующие входы компараторов 6 через сумматоры 5 подается напряжение с
вующие компараторы.
Если управляющие напряжения отри- цательны, состояние компараторов 6
не изменяется.
Следующий тактовый импульс с генератора 6 изменяет состояние счетчика 11, что приводит к изменению положения ключа 3 и коммутатора 4 и вновь запускает генератор 10 пилообразного . напряжения. При этом входные управляющие напряжения задатчика 1 подключаются к вторым входам сумматоров 5 и происходит преобразование всех отрицательных управляющих напряжений во временной интервал.
На входы элементов И-НЕ логического блока 7 поступают импульсы от компараторов 6. Предположим, что срабатывает элемент И-НЕ 15.1. Сигнал с выхода элемента И-НЕ 15.1 запрещает срабатывание остальных элементов И- НЕ 15 и через инвертор 16.1 поступает на соответствующий вход амплитудного модулятора 8. В последнем поступающий сигн;зл умножается на соответствующий весовой коэффициент и поступает на входы двухпороговых элементов 19. При сравнении величины пороговой зонь: элемента 19.1 с величиной амплитуды сигнала с выхода амплитудного модулятора 8 отпирается соответствующий тиристорный усилитель 21.1
и включается электродвигатель 22.1.
При включении электродвигателя происходит изменение тока питающей, сети. Изменение тока определяется с помощью датчика 12 тока и дифференциатора 13. В блоке 14 вьщеляется
абсолютное значение сигнала с выхода- дифференциатора 13, нормируется и подается на входы элементов И-НЕ 17,. . Элемент И-НЕ 17, на другом входе которого присутствует разрешающий потенциал, изменяет свое состояние, которое вызывает переключение тригге-, ра 18.1. Сигнал с выхода последнего
запирает элемент И-НЕ 15.1, тем самым разрешая включение других элементов И-НЕ 15.
При поступлении последующих импульсов работа устройства аналогична. По окончании управляющих импульсов, вращающих двигатели в одном направлении, импульсом с тактового генератора 9 все триггеры 18 возвращаются в исходное состояние, изменяется, по- лярность питающего напряжения, что приводит к запиранию тиристорных усилителей 21. Начинается процесс преобразования отрицательных управляющих воздействий и включение электродви- гателей, вращающихся в противоположном направлении. В этом случае работа логического блока 7, сумматора 5, двухпороговых элементов 19, апериодических звеньев 20, усилителей 21 аналогична работе на такте преобразования положительных управляющих напряжений .
Для устранения ложного включения электродвигателей при скачкообразном изменении сигнала с выхода a fflлитyд- ного модулятора 8 между двухпороговы- ми элементами 19 и усилителями 21 включены апериодические звенья 20, которые отфильтровывают высокочастотные составляющие, появляющиеся на выходе двухпороговых элементов 19.
Таким образом, поступающие на вход устройства непрерывные управляющие напряжения, величина и знак которых определяют скорость и направление вращения электродвигателей, одновременно преобразуются в последовательность импульсов, задний фронт импульсов всех последовательностей совмещен по времени, а ширина импульсов каждой последовательности зависит от величины соответствующего управляющего напряжения. Преобразование производится в два этапа: на первом этапе преобразуются положительные значения управляюш х напряжений, на втором этапе - отрицательные значения. Все последовательности импульсов модулируются по амплитуде и через усилите- ли мощности управляют соответствующими электродвигателями.
Совмещение по времени включения всех электродвигателей, вращаюш ихся в одном направлении, позволяет управ лять неограниченным числом электро-, двигателей при неизменной амплитуде питающего напряжения.
Формула изобретения
1.Устройство для управления ромбическим манипулятором, содержащее последовательно соединенные генератор импульсов, генератор пилообразного напряжения, последовательно соединенные задатчик управляющих напряжений и коммутатор, последовательно соединенные источник питания и ключ, а также блок выделения модуля, причем, выход счетчика импульсов подсоединен к управляющему входу коммутатора, а вход соединен с выходом генератора импульсов, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет управления неограниченным числом исполнительных двигателей, в него введены последовательно соединенные датчик тока и дифференциатор , по числу управляющих сигналов последовательно соединенные сумматоры и компараторы и последовательно соединенные логический блок
и амплитудный модулятор, выход которого является первым выходом устройства, выход генератора импульсов подключен к установочному входу логического блока, выход счетчика импульсов подсоединен к управляющему входу ключа, выход которого соединен с входом датчика тока, выход которого является вторым выходом устройства, выход генератора пилообразного напряжения подсоединен к вторым входам сумматоров, вторые входы компараторов соединены с вторыми выходами коммутатора, а выходы - с соответствующими информационными входами логического блока.
2.Устройство по п.1, о т л и ч ающ ее с я тем, что в нем логический блок содержит по числу управляющих сигналов устройства аналогичные каналы, каждый из которых состо-- ит из последовательно соединенных триггера, многовходового элемента И-НЕ, элемента НЕ и двухвходового элемента И-НЕ, причем, вторые входы многовходовых элементов И-НЕ соединены с соответствующими информационными входами блока, остальные входы - с выходами других многовходовых элементов И-НЕ, вторые входы двухвходо- вых элементов И-НЕ соединены с входом обратной связи блока, а выход каждого двухвходового элемента И-НЕ - с первым входом соответствующего
513159336
триггера, второй вход которого соеди- выходы элементов НЕ являются выхода- нсн с установочным входом блока, а ми блока.
Фиг.1
фиг. г
Ш
Ш
в в
21.1
Ш
20.Г
212
2П
20.2
ФШ.З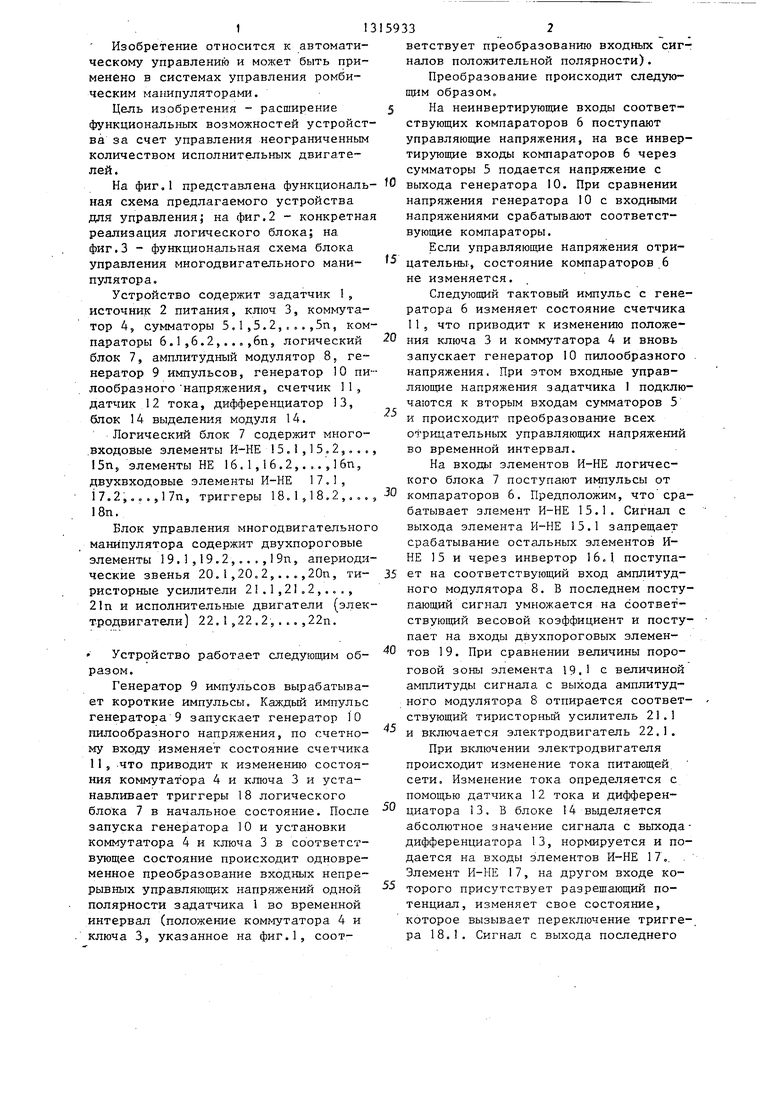

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство для централизованного контроля | 1974 |
|
SU652570A2 |
| Система управления | 1983 |
|
SU1168896A1 |
| Измеритель амплитудно- и фазочастотной характеристики СВЧ-тракта | 1990 |
|
SU1721546A1 |
| Устройство для измерения чувствительности приемных радиоэлектронных средств | 1984 |
|
SU1188678A2 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
| Цифровое устройство для измерения температуры | 1982 |
|
SU1006937A1 |
| Асинхронный электропривод | 1989 |
|
SU1697252A1 |
Изобретение касается автоматического управления. Целью изобретения является расширение функциональных возможностей. Изобретение характеризуется тем, что для группового управления электродвигателями используют широтно-импульсные сигналы, ширина которых в одном интервале управления определяется величиной управляющего напряжения. Первым включается двигатель с наибольшим значением величины управляющего напряжения , включение последуюш 1х двигателей идет в порядке учитывания значения управляющих напряжений. 1 з.п. ф-лы, 3 ил. (Л 00 СП со. со со
| Авторское свидетельство СССР | |||
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1275372A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
