1
Изобретение относится к машиностроению и может быть использовано для балансировки роторов машин в процессе работы.
Известно устройство для балансировки роторов в процессе работы машин, содержашее корректирующий груз в виде диска с эксцентричной массой и механизм его поворота, выполненный в виде волновой передачи.
Однако это устройство нельзя исполь- зовать для балансировки роторов с распределенным дисбалансом произвольной формы.
Предлагаемое устройство позволяет корректировать как статический, так и динамический дисбалансы.
Для этого оно снабжено дополнительным диском с эксцентричной массой и механизмом его поворота в виде волновой передачи. Каждый из дисков соединен гибким элементом с шестерней, закрепляемой на роторе, а генератор волн устанавливается на корпусе машины и выполнен разъемным из половин, соединяемых силовьгм приводом с помощью системы автоматического управления или оператором в момент
превышения допустимого уровня вибрыпи машины.
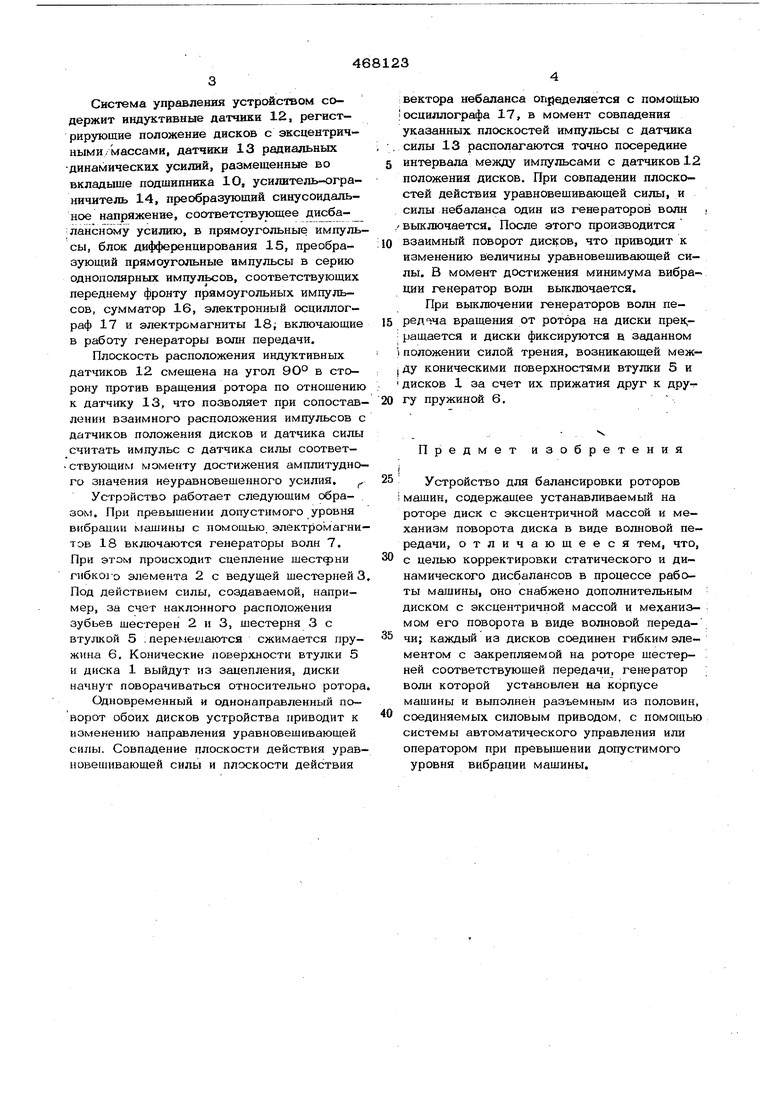
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - функциональная схема системы контроля и управления устройством.
Устройство для балансировки роторов содержит два диска 1 с эксцентричными массами, каждый из которых соединен через гибкий элемент 2 волновой передачи с шестерней внутреннего зацепления 3, жестко связанной с балансируемым ротором 4. Стопорение дисков 1 от случайного ПС®орота осуществляется с помощью втулки 5 и пружины 6, которая прижимает конические фрикционные поверхности втулки и диска друг к другу.
Генератор волн 7 с роликами 8 состоит из половин и устанавливается на неподвижном корпусе машины, , Система контроля вибрации содержит датчики вибрации 9, размешенные на корпусе подшипника 1О, и измерительный усилитель 11.
Система управления устройством содержит индуктивные датчики 12, регистрирующие положение дисков с эксцентричными/массами, датчики 13 радиальных динамических усилий, размещенные во вкладыше подшипника Ю, усилитель-ограничитель 14, преобразующий синусоидальное напряжение, соответствующее дисбалансному усилию, в прямоугольные импульсы, блок дифференцирования 15, преобразующий прямоугольные импульсы в серию однополярных импульсов, соответствующих переднему фронту прямоугольных импульсов, сумматор 16, электронный осциллограф 17 и электромагниты 18 включающие в работу генераторы волн передачи.
Плоскость расположения индуктивных датчиков 12 смещена на угол 9О° в сторону против вращения ротора по отнощению к датч1псу 13, что позволяет при сопоставлении взаимного расположения импульсов с датчиков положения дисков и датчика силы считать импульс с датчика силы соответ- - ствующим моменту достижения амплитудного значения неуравновешенного усилия,
Устройство работает следующим образом. При превышении допустимого уровня вибрации машины с помощью электромагнитов 18 включаются генераторы волн 7. При этом происходит сцепление шестфни шбкого элемента 2 с ведущей щестернейЗ Под действием силы, создаваемой, например, за счет наклонного расположения зубьев шестерен 2 и 3, шестерня 3 с втулкой 5 .перемешаются сжимается пружина 6, Конические поверхности втулки 5 и диска 1 выйдут из зацепления, диски начнут поворачиваться относительно ротора
Одновременный и однонаправленный поворот обоих дисков устройства приводит к изменению направления уравновешивающей силы. Совпадение плоскости действия уравновешивающей силы и плоскости действия
вектора небаланса определяется с помощью ; осциллографа 17, в момент совпадения указанных плоскостей импульсы с датчика .силы 13 располагаются точно посередине 5 интервала между импульсами с датчиков 12 положения дисков. При совпадении плоскостей действия уравновещивающей силы, и силы небаланса один из генераторов волн / выключается. После этого производится 0 взаимный поворот что приводит к изменению величины уравновешивающей силы. В момент достижения минимума вибрации генератор волн вьшлючается.
При выключении генераторов волн пе5 вращения от ротора на диски прек,: ращается и диски фиксируются в заданном ) положении силой трения, возникающей меж(Ду коническими поверхностями втулки 5 и i дисков 1 за счет их прижатия друг к дру-г 0 ГУ пружиной 6,
Предмет изобретения
25 Устройство для балансировки роторов i машин, содержащее устанавливаемый на роторе диск с эксцентричной массой и механизм поворота диска в виде волновой передачи, отличающееся тем, что.
с целью корректировки статического и динамического дисбалансов в процессе работы машины, оно снабжено дополнительным диском с эксцентричной массой и механизмом его поворота в виде волновой переда- чи; каждый из дисков соединен гибким элементом с закрепляемой на роторе тестер- . ней соответствующей передачи, генератор ; волн которой установлен на корпусе мащины и выполнен разъемным из половин, соединяемых силовым приводом, с помощью системы автоматического управления или оператором при превышении допустимого уровня вибрации машины. f( -/A
Фиг. 2 Фиг. 1
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки роторов | 1981 |
|
SU962771A1 |
| Устройство для балансировки роторов машин | 1983 |
|
SU1157377A1 |
| Устройство для балансировки роторов | 1978 |
|
SU771488A1 |
| СПОСОБ БАЛАНСИРОВКИ АЭРОДИНАМИКИ ЛОПАТОЧНОГО КОЛЕСА | 2005 |
|
RU2301966C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| СПОСОБ КОМПЕНСАЦИИ СТАТИЧЕСКОЙ НЕУРАВНОВЕШЕННОСТИ РОТОРА ГИДРАВЛИЧЕСКОЙМАШИНЫ | 1972 |
|
SU348905A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА С ПРИВОДНОЙ МУФТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2387962C1 |
| Способ автоматической многовекторной балансировки рабочих колёс турбомашин и устройство для его реализации | 2022 |
|
RU2789214C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |


