второй вход через третий элемент ИЛИ-НЕ и компаратор соединен с
вторым входом логического блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство двухкоординатного позиционирования | 1985 |
|
SU1288653A1 |
| Система для двухкоординатного позиционирования | 1984 |
|
SU1249484A1 |
| Устройство для отображения векторов на экране электронно-лучевой трубки | 1988 |
|
SU1635171A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1481813A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Двухкоординатная система позиционирования | 1972 |
|
SU470793A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для кодирования чертежей печатных плат | 1979 |
|
SU858029A1 |
1. УСТРОЙСТЮ ДЛЯ ДВУХКООРДИНАТНОГО ПОЗИЦИОНИРОВАНИЯ, содержащее блок ввода, выходами соединенный с первыми входами блока управления и с первыми входами блока коррекции,координатные приводы и датчики положения, о т л и ч а ющ е е с я тем, что, с целью упрощения конструкции, в него введены компаратор, первый коммутатор и операционный усилитель, первый и второй логические блоки, второй и третий коммутаторы, а блок коррекции содержит фазовый дискриминатор и два формирователя периодических сигналов, причем координатные приводы через соответствующие, коммутаторы подключены к первые вы ходам блока управления, вторые выходы которого соединены с входами второго логического блока, подключенного выходом к вторым входам второго и третьего коммутаторов, к компаратору и к первому входу первого логического блока, выход которого через первый коммутатор и операционный усилитель соединен с,третьими входами второго и третьего коммутаторов, датчики поло хения подключены к вторым входам блока управления и вторым входам блока коррекции, третий выход блока управления соединен с входом СБРОС первого и второго формирователей блока коррекции. 2.Устройство по п. 1, о тли чающееся тем, что первый формирователь периодических сигналов содержит два канала, каждый из которых состоит из последовательно соединенных входного регистра, преобразователя код-напряжение и модулятора, выходы которых через сутлматор и формирователь прямоугольных импульсов подключены к первому выходу формирователя периодических сигналов, вторые выходы входных регистров соединены с вторыми выходами данного блока. 3.Устройство по п. 1, отличающееся тем, что второй формирователь периодических сигналов состоит из двух каналов, каждый из которых содержит последователь™ . но соединенные входной счетчик,преобразователь код-напряжение и модулятор, выходы которых подключены к входам алгебраического сумматора, выходом соединенного через форО СП мирователь прямоугольных импульсов с выходом формирователя периодических сигналов. 4.Устройство по п. 1, отлию чающееся тем, что первый логический блок содержит три элемента ИЛИ-НЕ, два элемента И-НЕ « элемента И, выход которого соединен с выходом логического блока, первый и второй входы - с выходами первого и второго элементов ИЛИ-НЕ соответстьанно, первый и второй вхолы первого элемента И-НЕ через элементы ИЛИ-НЕ подключены к первому и второму входу логического блока соответственно, первый вход второго элемента И-НЕ соединен с первым входом блока,, а
Изобретение относится к автомати ческому управлению и может быть использовано в программных системах двухкоординатного позиционирования Известны системы двухкЪординатного позиционирования, содержащее блок ввода программы, пояключенный к блоку управления, соединенному с координатными приводами, и датчики перемещения по каждой координате, о разующие обратные связи по положению CliJ. Недостатком данных сист«л являет ся то, что большие двухкоординатные перемещения осуществляются по криво линейной атраекторииу из-за чего излишне нагружается предельными дина мическими : нагрузками силовая част привода той координаты, по которой меньше соотношение заданного перемещения к максимальной скорости, что неоправданно ускоряет износ механической части системы, повышает расход электроэнергии, т.е. привод работает в неоптимальном режиме. Наиболее близкой к предлагаемой является двsrxкoopдинaтнaя с 1стема программного управления координатными перемещениями, содержащая блок ввода, блок коррекции, датчики положения, соединенные с устройством управления, и координатные приводы Устройство управления выполнено в виде общего преобразователя положение-код, входы которого подключены к датчикам положения, а выходк арифметическому устройству, основной вход которого подключен к блоку ввода, а рабочие выходы по каждой координате через последова тельно соединенц регистр, преобразователь код-напряжение подклюЧ(ены к координатньм приводам. Лодюлнительный выход соединен с входо сумматора кодов коррекции блока кор рекции. Блок коррекции содержит пос ледовательно соединенные сумматор кодов коррекции, преобразователь код-напряжение и сумматоры напряжений по каждой координате. Дополнительные входы сумматоров напряжения подключены к источнику опорного напряжения, а выходы подключены по каждой координате к преобразователя код-напряжениеустройства управлеЛИЯ Г21. По.сравнению с аналогом система позволяет обеспечить оптимальную траекторию перемещения, однако она является сложной в конструктивном исполнении. Кроме того, система неработоспособна при введении минимальной инфоЕ 1ации, т.е. только координат конечной точки перемещения. Пошаговый режим воспроизведения.прямолинейных перемещений в данной системе требует постоянного поступления информации от цифрового управляющего устройства, а скорость позиционирования в значит ельной степени зависит от быстродействия последнего. Цель изобретения - упрощение конструкции при од нов роенном обеспечении работоспособности системы от минимальной вводимой информации. Поставленная цель достигается тем, что в устройство для двухкоординатного позиционирования, содержащее блок ввода г выходами соединенный с первыми входами блока управления и с первыми входами блока коррекции, координатные приводы и датчики положения, введены компаратор, первый коммутатор, операционный усилитель, первый и второй логические блоки, второй и третий комлуТагоры, а блок коррекции содержит фазовый дискриминатор и два формирователя периодических сигналов,.причем координатные приводы через соответствующие коммутаторы подключены к первым выходам блока управления, вторые выходы которого соединены с входами второго логического блока, подключенного выходом к вторьм входам второго и третьего ко1лмутаторов, к компаратору и к первс |у входу первого логического блока, выход которого через первьЛ коммутатор и операционный усилитель соединен с третьими входами второго и третьего коммутаторов, датчики положения подключены к вTOiMJM входам блока управления и к вторым входам блока коррекции, третий выход блока управления соединен с входом СБРОС первого и второго формирователей перис5дических сигналов блока коррекции. Первый фЬрмирователь периодических сигналов содержит два канала.
каждБй из которых состоит из последовательно соединенных входного регистра, преобразователя код-напряжение и модулятора, выходы, которых через сумматор и формирователь прямоугольных импульсов подключены к первому, выходу формирователя периог дических сигналов, вторые выходы входных регистров соединены с вторьми выходами данного блока. .
Второй формирователь периодических сигналов состоит из двух каналов, каждый из которых содержит последовательно соединенные входной , преобразователь коднапряжение и модулятор, выходы которых подключены к входам алгебраического сумматора, выходом соединенного через формирователь прямоугольных импульсов с выходом формирователя периодических сигналов.
Первый логический блок содержит три элемента ИЛИ-НЕ, два элемента И-НЕ и элемент И, выход которого соединен с выходом логического блрка, первый и второй входы - с выходгили первого и второго элементов ИЛИ-НЕ, соответственно, дервый и второй входы первого элемента И-НЕ через элементы ИЛИ-НЕ подключены к первому и второму входу логического блока соответственно, первый вход второго элемента И-НЕ соединен с первым входом блока, а второй вход - через третий элемент ИЛИ-НЕ и компаратор соединен с вторым входом логического блока
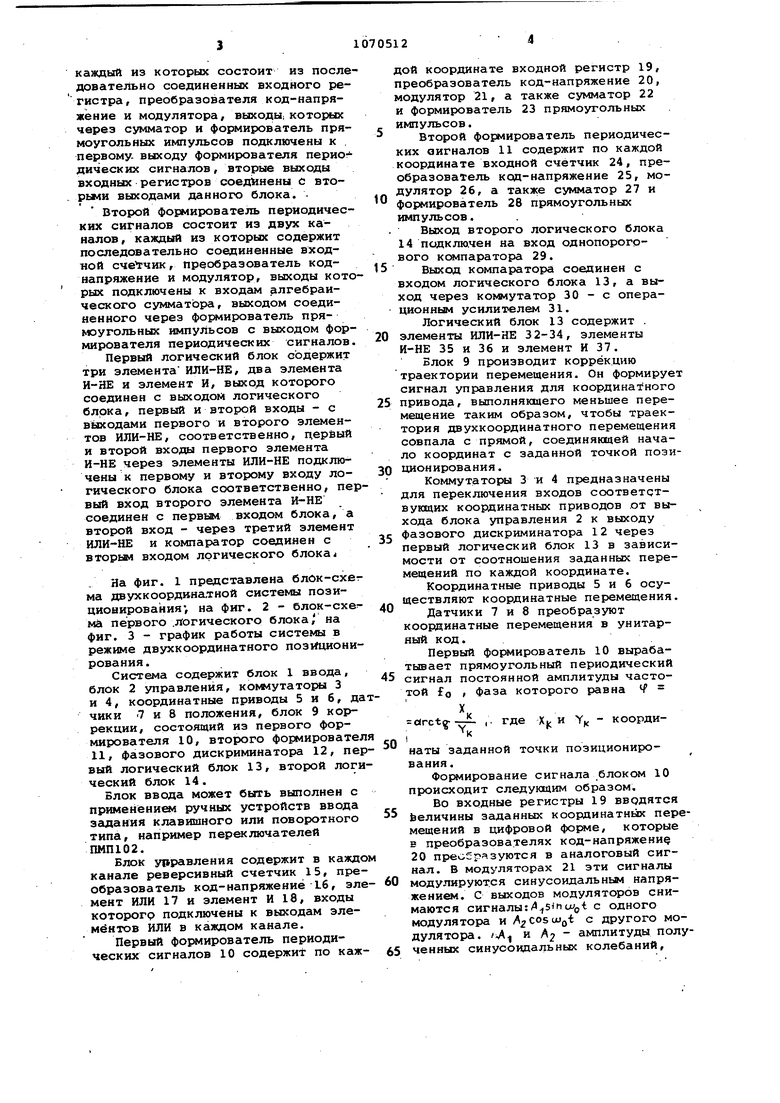
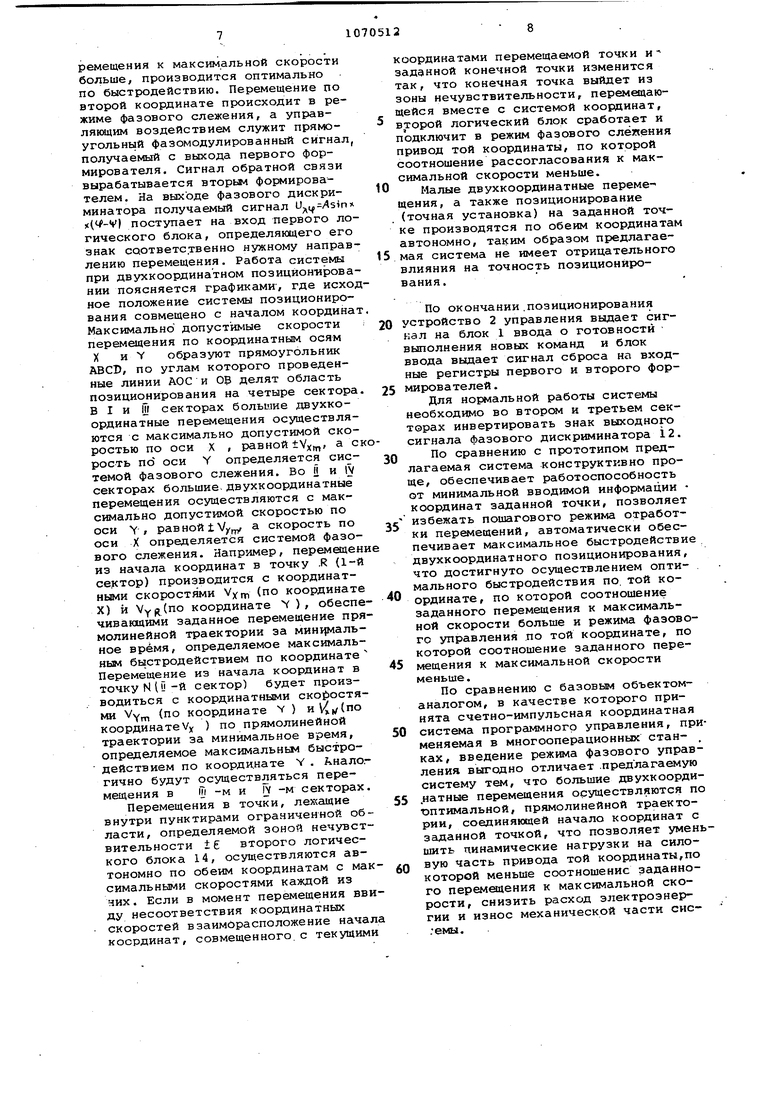
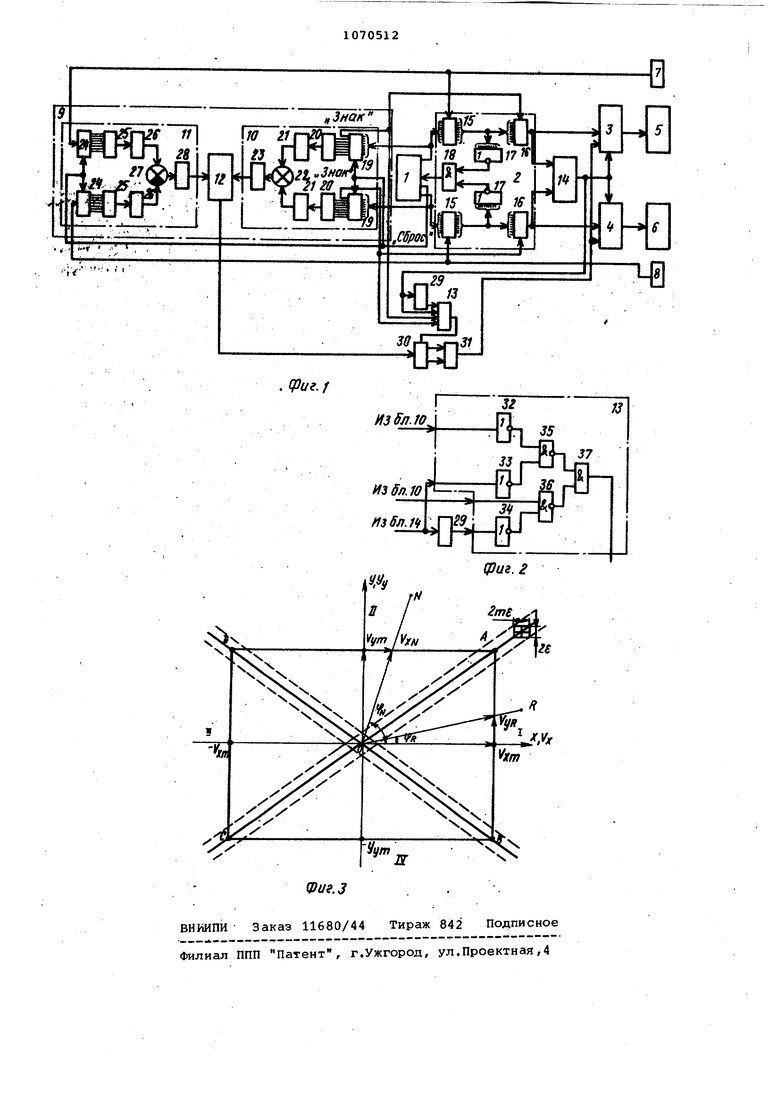
На фиг. 1 представлена блок-схвтма двухкоордина,тной системы позиционирования, на фиг. 2 - блок-схе:ма первого .логического блока на фиг. 3 - график работы системы в режиме двухкоординатного позиционирования.
Система содержит блок 1 ввода, блок 2 управления, колвлутаторы 3 и 4, координатные приводы 5 и б, датчики 7 и 8 положения, блок 9 коррекции, состоящий из первого формирователя 10, второго формирователя 11, фазового дискриминатора 12, первый логический блок 13, второй логический блок 14.
Блок ввода может быть выполнен с применение ручных устройств ввода задания клавишного или поворотного типа, например переключателей ПМП102.
БЛОК управления содержит в каждом канале реверсивный счетчик 15, преобразователь код-напряжение L6, элемент ИЛИ 17 и элемент И 18, входы которогр подключены к выходам элементов ИЛИ в каждом канале.
Первый формирователь периодических сигналов 10 содержит по каждой координате входной регистр 19, преобразователь код-напряжение 20, модулятор 21, а также сумматор 22 и формирователь 23 прямоугольных импульсов.
Второй формирователь периодических сигналов 11 содержит по каждой координате входной счетчик 24, преобразователь код-напряжение 25, модулятор 26, а также сумматор 27 и формирователь 28 прямоугольных импульсов.
Выход второго логического блока 14 подключен на вход однопорогового компаратора 29.
Выход компаратора соединен с входом логического блока 13, а выход через коммутатор 30 - с операционным усилителем 31.
Логический блок 13 содержит . элементы ИЛИ-НЕ 32-34, элементы И-НЕ 35 и 36 и элемент И 37.
Блок 9 производит коррекцию траектории перемещения. Он формирует сигнал управления для координатного привода, выполняющего меньшее перемещение таким образом, чтобы траектория двухкоординатного перемещения совпала с прямой, соединяк1цей начало координат с заданной точкой позиционирования .
Коммутаторы 3 и 4 предназначены для переключения входов соответствующих координатных приводов от выхода блока управления 2 к выходу фазового дискриминатора 12 через первый логический блок 13 в зависимости от соотношения заданных перемещений по каждой координате.
Координатные приводы 5 и 6 осуществляют координатные перемещения.
Датчики 7 и 8 преобразуют координатные перемещения в унитарный код.
Первый формирователь 10 вырабатывает прямоугольный периодический сигнал постоянной амплитуды частотой ffl , фаза которого равна Ч
к -arcty-- ,. где Xi. и Y, - коорди11
наты заданной точки позиционирования.
Формирование сигнала блоком 10 происходит следующим образом.
Во входные регистры 19 вводятся величины заданных координатных перемещений в цифровой форме, которые Б преобразователях код-напряжение 20 преобразуются в аналоговый сигнал. В модуляторах 21 эти сигналы модулируются синусоидальным напряжением. С выходов модуляторов снимаются сигналы:/l sirioLtQt с одного модулятора и с другого модулятора. 1 и 2 - амплитуды полу5 ченных синусоидальных колебаний, величина которых соответствует за данным координатным перемещениям. Полученн.-:е промодулированные н пряжения суммируются в сумматоре 22« Фаза синусоидального .напряжения на выходе сумматора равна А,X. - --oirct( а амплиту. , где X,Y - координаты-Эаданной точки позиционированйя. Формирователь 23 представл из себя усилитель-ограничитель с релейной характеристикой и выполнен в виде операционного усилител рхваченного положительной обратно связью. С .выхода формирователя 23 снимается напряжение прямоугольно формы с постоянной амплитуды, фаза которой равна . В один из разрядов входных регистров 19 вводится информация в направлении (знаке) заданного координатного перемещения. При этом соответствующие выходы входных ре гистров подключены по каждой коор дина те к преобразователям код-напряжение 16 блока управления и к соответствукщфл входам первого ло гического блока 13. Второй формирователь 11 выраба вает прямоугольный периодический сигнал постоянной амплитуды и час тоты fo I начальная фаза которого A -j-+V V:., где X,v кущие координаты перемещаемой точФазовый .дискриминатор 12 предназначен для формирования сигнала управления, функционально зависящего от рассогласования по фазе (J-,,-Asin(V-V) сигналов от первого и второго формирователей, соответствугацих заданному и фактическому ар гументу векторов. Первый, логический блок 13,компара тор 29 и коммутатор 30 предназ начены для определения знака выход ного напряжения фазового дискриминатора в зависимости от заданных координатных перемещений и от соот ношения, абсолютных значений самих перемещений. Коммутатор 30 подключает выход фазового дискриминатора 12 от неинвертирующего входа к инвертирующему входу операционного усилителя 31 при выполнении логической функц SVYY -SX-VXi 1 . SX.SV - логические переменные, равные , когда зада ны положительные перемещения по ко ординатным осям X и Y соответст венно и равные О, когда заданы перемещения отрицательные VX,VY логические переменные, принимающие когда.производятся значение перемещения с максимальной скоростью по координатам X иЛи У соответственно. Второй логический блок 14 предназначен для управления коммутаторами 3 и 4 в соответствии с рассогласованиями по каждой координате. Функция управления блока 14 заключается в том, что он формирует сигнал управления коммутаторами 3 и 4 согласно закону: если |дх(-т|ЛУ| шевели - (AX|-m(AYjig max I (ДХ|-П1( Коммутаторы, выполненные в виде разнополярных электронных реле, подключают входы координатных приводов к блоку 2 управления или к выходу первого логического блока 13. В роли коммутатора 30, имеющего два выхода, может быть использовано электронное реле с переключающим контактом. При этом, когда на управляющем входе комг татора напряжение соответствует логическому О, то его рабочий вход подключен к первому выходу, а на управляющем входе напряжение равно логической , то рабочий вход подключен к второму выходу. Система работает следующим образом. Блок ввода, согласно программе выдает координаты конечной точки перемещения в цифровой форме, Эти координаты запоминаются в реверсивных счетчиках блока 2 управления и входных регистрах первого формирователя 10. Сигналы рассогласования по кажд.ой координате X, V , выдаваемые устройством 2 управления, поступают на вход второго логического блока, который управляет коммутатора ми 3 и 4 следукнцим образом: если |лХ1-т|дУ| : Igf , то выходы коммутаторов подключены к блоку 2 управления если |лХ1-т лЧ , то вход координатного привода 5 посредством коммутатора 3 подключен к блоку 2 управления, а вход координатного привода 6 посредством коммутатора 4 подключается к фазовому дискриминатору 12; если |(2Х|-т , то вход координатного, привода 5 посредством коммутатора 3 через первый логический блок 13 подключается-к выходу фазового дискриминатора 12, а вход координатного привода 6 посредством коммутатора 4 к блоку 2 управления. Здесь V;(fr) максимальная скорость перемещения по координате X ; V, максимальная скорость перемещения по координате Y ,- f - зона нечувствительности. Вследствие этого позиционирование по той координате, по которой соотношение заданного перемещения к максимальной скорости больше, производится оптимально по быстродействию. Перемещение по второй координате происходит в режиме фазового слежения, а управляющим воздействием служит прямоугольньай фазомодулированный сигнал, получаемый с выхода первого формирователя. Сигнал обратной связи вырабатывается вторьли формирователем. На выходе фазового дискриминатора получаемый сигнал x(-V| поступает на вход первого логического блока, определяющего его знак соответственно нужному направлению перемещения. Работа системы при двухкоординатном позиционировании поясняется графиками, где исходное положение системы позиционирования совмещено с началом координат Максимально допустимые скорости перемещения по координатным осям X и V образуют прямоугольник ABCD, по углам которого проведенные линии ДОС и ОБ делят область позиционирования на четыре сектора. В I и iTt секторах большие двухкоординатные перемещения осуществляются с максимально допустимой скоростью по оси X , равной tVxrt,, скрость nd оси Y определяется сиетемой фазового слежения. Во И и IV секторах большие двухкоординатные перемещения осуществляются с максимально допустимой скоростью по оси Y, равной1Уу а скорость по оси X определяется системой фазового слежения. Например, перемещени из начала координат в точку .R {1-й сектор) производится с координатными скоростями V) (по координате X) и VygCno координате ), обеспечивающими заданное перемещение прямолинейной траектории за мин1 мальное время, определяемое максимальным быстродействием по координате Перемеще ние из начала координат в точку N10-и сектор) будет производиться с координатными ско остями VY (по координате v ) и(по координатеУХ ) по прямолинейной траектории за минимальное время, определяемое максимальный быстродействием по коорди.нате Y . htianorгично будут осуществляться перемещения в iTi -м и IV -м секторах.
Перемещения в точки, лехсащие внутри пунктирами ограниченной области, определяемой зоной нечувствительности 16 второго логического блока 14, осуществляются автономно по обеим координатам с мак симальными скоростями каждой из чих. Если в момент перемещения ввиду несоответствия координатных скоростей взаиморасположение начал координат, совмещенного с текущими
координатами перемещаемой точки и заданной конечной точки изменится так, что конечная точка выйдет из зоны нечувствительности, перемещающейся вместе с системой координат, второй логический блок сработает и подключит в режим фазового слёиения привод той координаты, по которой соотношение рассогласования к максимальной скорости меньше.
Малые двухкоординатные перемещения, а также позиционирование (точная установка) на заданной точке производятся по обеим координатам автономно, таким образом предлагаемая система не имеет отрицательного влияния на точность позиционирования.
По окончании.позиционирования устройство 2 управления выдает сигкал на блок I ввода о готовности выполнения новых команд и блок ввода выдает сигнал сброса на входные регистры первого и второго формирователей .
Для нормальной работы системы необходимо во вторсм и третьем секторах инвертировать знак выходного сигнала фазового дискриминатора 12.
По сравнению с прототипом предлагаемая система конструктивно проще, обеспечивает работоспособность от минимальной вводимой информации координат заданной точки, позволяет избежать пошагового режима отработки перетлещений, автоматически обеспечивает максимальное быстродействи двухкоординатного позиционирования, что достигнуто осуществлением оптимального быстродействия по. той координате, по которой соотношение заданного перемещения к максимальной скорости больше и режима фазового управления .по той координате, по которой соотношение заданного перемещения к максимальной скорости меньше.
По сравнению с базовым объектоманалогом, в качестве которого принята счетно-импульсная координатная система программного управления, прменяемая в многооперационных станках, введение режима фазового управления выгодно отличает .предлагаемую систему тем, что большие двухкоорди.натные перемещения осуществляются п оптимальной, прямолинейной траектории, соединяющей начало координат с заданной точкой, что позволяет уменшить пинамические нагрузки на силовую часть привода той координаты,по которой меньше соотношение заданного перемецения к максимальной скорости, снизить расход электроэнергии и износ механической части сис.емы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ксрытин Д.И | |||
| и др | |||
| Автоматизация типовых технологических процессов И промышленных установок | |||
| Киев, Одесса, Высшая школа, 1980, с | |||
| Способ амидирования жидких сульфохлоридов ароматического ряда | 1921 |
|
SU316A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Двухкоординатная система программного управления | 1972 |
|
SU448436A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
