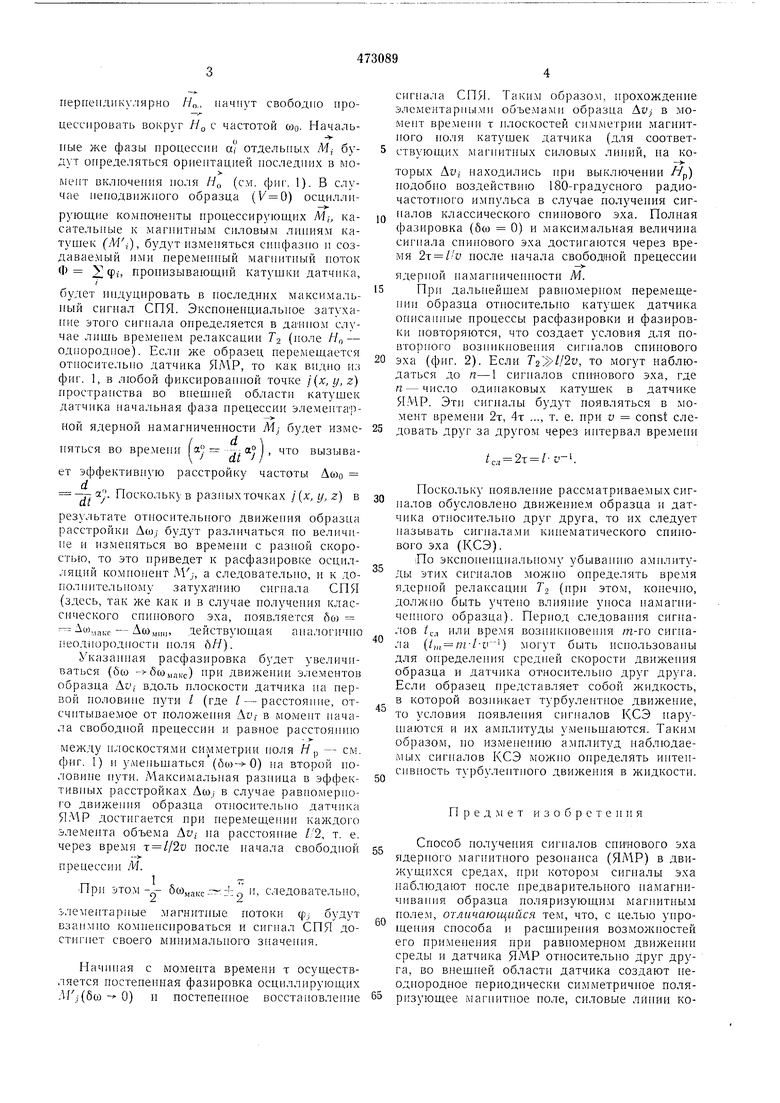
Г1ерпе11дикуляр:но /Уо:, качнут свободно процессировать вокруг Н с частотой OJQ. Начальиые же фазы npoueccini а отдельных /И,- будут определяться ориентацией последних в момент включения по:1Я Яо (см. ф1Н. 1). В случае неподвижного образца (V 0) осцнллирующие ко.мпоненты процессирующих М,-, касательные к магнитным силовым лпииям катуи ек (Mi), будут изменяться сиифазпо н создаваемый нми переменный магнитный ноток Р V фг, пропизываюпдпй катушки датчика, / будет ппдуцировать в последних максимальный сигнал СПЯ. Экспоненциальное затухание этого сигнала онределяется в случае лишь временем релаксации Т (поле Нг, - однородное). Если же образец перемещается отпосите.чьно датчика ЯМР, то как видно нз фиг. 1, в любой фиксировагпюй точке i(x,y,z) пространства во внешней области катушек датчнка начальная фаза прецессии элемеитарной ядериой намагничеппости М,- будет изме/dпяться во времеии г) / вызывает эффективную расстройку частоты Дсоо -77 Поскольку Б разных точках /(х, у, z) в резу.1ьтате относительного движения образца расстройки Дсо/ будут различаться но величине и из.мепяться во времени с разной скоростью, то это приведет к расфазировке осцил;1яций компонент М;, а следовательно, и к дополннтельпому затуханию сигнала СПЯ (здесь, так же как и в случае получепня класснческого спииового эха, появляется йо) - «мпкс - Дц),и„„, действующая а 1алогичио пеоднородностн ноля йЯ). Указанная расфазировка будет увеличиваться (бсо - бсомакс) фи движении элементов образца Atj вдоль плоскости датчика на первой половине пути / (где / - расстояние, отсчитываемое от положе1П1Я At,- в момент начала свободной прецессии и равное расстоянию между и;1 ос костям и симметрии иоля Н р - см. фиг. 1) и умеиьшаться (бш- 0) на второй ноловине пути. Максимальная разница в эффективных расстройках Лсо; в случае равномерного движения образца отиосительио датчика ЯМР достигается при перемещении каждого эле.меита объема Ду; па расстояние //2, т. е. через время т //2и после начала свободной прецессии /И. При этом-„- б(о„а|гс-- -±п 11, следовательно, элементарные магнитные потоки ф, будут взаимио комиеиепроваться и сигнал СПЯ достигнет своего минимальпого значения. Пач1П1ая с момента времеии т осуществляется постепепная фазировка осциллирующих Л1,-(бш - 0) и постепеппое восстановленне снгнала СПЯ. Такн.м образом, прохождение элементарн)1ми объемами образца Ди,- в момент времени т илоскостей симметрии магнитиого ноля катушек датчика (для соответствующих ма1иитиых силовых линий, па которых До/ находились ири выключении //р) нодобпо воздействию 180-градусного радиочастотного и.мнульса в случае получения сигпалов классического спинового эха. Полная фазировка (бсо 0) и максимальная величина сигнала снииового эха достигаются через время 2т /у после начала свобод1пой прецессии ядериой намагниченности М. При дальнейшем равно.мериом перемещенин образца относительно катушек датчика оннсаииые нроцессы расфазировки и фазпровки новторяются, что создает условия для повторного возник 1овения сигналов спинового эха (фнг. 2). Еслн , то могут наблюдаться до п-1 сигналов сппиового эха, где п-число одииаковых катушек в датчике ЯА1Р. Эти сигналы будут появляться в момент времени 2т, 4т ..., т. е. при и const следовать друг за другом через ннтервал времени t,,, 2r l-v-. Поскольку ноявление рассматриваемых сигналов обусловлено движение. образца и датчика относительно друг друга, то нх следует называть сиг-налами кинематического спинового эха (КСЭ). По эксноненцнальному убывангно амнлитуды этих сигналов можио определять время ядерной релаксации Т (при этом, конечно, должно быть учтено влияние уноса намагниченлюго образца). Пернод следовання сигнатов /ел илн время возникповеиия /п-го спгпала (i,.lv могут быть пспользовапы для определення средней скорости движения образца и датчика относительно друг друга. Если образец представляет собой жндкость, в которой возникает турбулентное движение, то условия появления сигналов КСЭ нарупшются и их амплитуды уменьшаются. Таки.м образом, но изменению амплитуд наблюдаемых сигналов КСЭ можно определять интенсивность турбулентного движепия в жидкости. П р е д .м е т и з о б р е т е и н я Способ получения сигналов снпнового эха ядерного магнитного резонанса (ЯМР) в движущихся средах, при которо.м сигпалы эха наблюдают после предварительного намагничивания образца поляризующи.м магнитным полем, отличающийся тем, что, с целью упрощения способа и расширения возможностей его применения при равномерном движепии среды и датчика ЯМР относительно друг друга, во внешней областн датчика создают неоднородное периодически симметричное поляризующее магннтное поле, силовые линии которого проходят перпендикулярно ви.пшему однородному магнитному полю, зате.м выключа-ч Г мяр11зу1он1ее поле п регистрируют сигн;;,;ь; сшнювого эха ЯМР.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ получения сигналов кинематического спинового эха во внешнем неоднородном магнитном поле | 1974 |
|
SU518712A1 |
| Способ измерения интенсивности турбулентного движения в жидкости | 1972 |
|
SU499528A1 |
| Способ измерения скорости равномерного течения жидкости | 1972 |
|
SU439756A1 |
| Способ нутационной релаксометрии | 1982 |
|
SU1103130A1 |
| Способ наблюдения ядерного магнитного резонанса | 1977 |
|
SU644226A1 |
| Устройство для определения биохимических изменений и физиологического состояния растительных объектов | 1978 |
|
SU994968A1 |
| Способ наблюдения ядерного магнит-НОгО РЕзОНАНСА | 1976 |
|
SU817554A2 |
| Способ нутационной релаксометрии | 1978 |
|
SU765725A1 |
| Способ получения спинового эха в ферромагнетиках | 1985 |
|
SU1368750A1 |
| ЯМР СПЕКТРОСКОПИЯ С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ЯМР С ГРАДИЕНТНЫМ ПОЛЕМ | 2003 |
|
RU2251097C2 |

О Г Т
Риг 2
