34783
- синусно-косинусного°Брашающегося транс, форматора подключена к первому входу (|рзочувствительного блока, второй вход которого подключен к источнику питания, а выход - к первому входу регистрируюшего блока. Второй вход прследиего подключен к выходу датчика меток, кинематически соединпому с валом двигателя и с подвижной частью второго синусно-косинусног вращающегося трансформатора, причем при даточн е отношение от второго синуснокосинусного врашаюшегося трансформа- ора к подвижной части эталонного датчика равно коэффициенту электрической редукции датчиков,
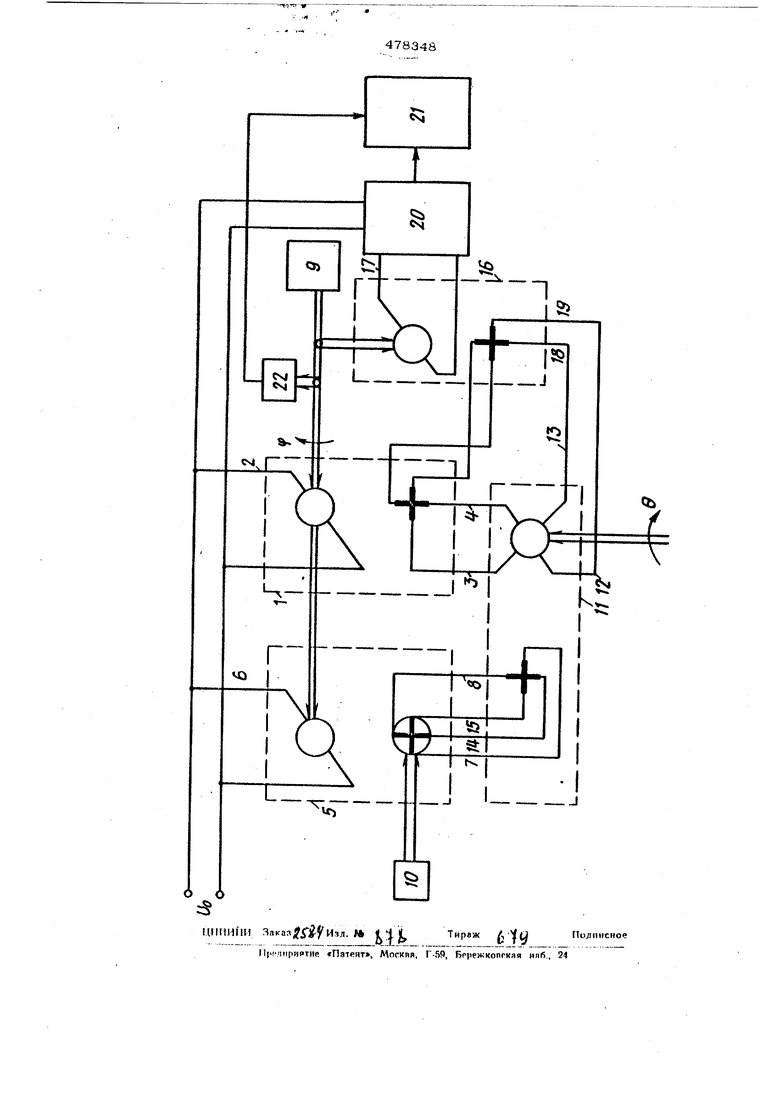
На чертеже приведено устройство для проверки датчиковьгх угловых и линейных величин.
Оно содержит эталонный датчик 1, который включает в себя подвижную часть с обмоткой возбуждения 2 и неподвижную часть с обмотками синхронизации 3,4; контролируемый датчик 5, включаюпшй подвижную часть с обмоткой возбуждения
6 и неподвижную часть с обмотками синхр низации 7,8. Обмотки возбуждения датчиков подключены к источнику питания. Подвижные части эталонного и контррлируемого датчиков жестко соединены друг с другом и кинематически соединены с валом двигателя 9. Поворотный механизм 1О кинемат1гчсски соединен с неподвижной частью контролируемого датчика. Синусно- косинусный врая1аю1пийся трансформатор (СКВТ) 11 содержит обмотки синхронизации 12 и 13 ротора и обмотки возбуждения 14 и 15 статора.
Синусно-косинусный вращающийся трансформатор 16 содержит обмотку возбуждения ротора 17 и обмотки синхронизации статора J. 8 и 19, Обмотки синхронизации контролируемого датчика подключены к обмоткам возбуждения СКВТ 11, а обмот ки синхронизации синусно-косинусных вращающихся трансформаторов и эталонного датчика соответственно соединены друг с другом.
Обмотка возбуждения СКВТ 16 подключена к первому входу фазочувствительнэго блока 20, второй вход которого подключен к источнику питания, а выход - к первому входу регистрирующего блока 21, второй вход которого подключен к выходу датчика меток 22, кинематически соединенному с валом двигателя и с ротором СКВТ 16.
Устройство работает следующим образом.
Сигналы с фаз эталонного датчика определяются выражениями
U, U j-Ksinpy i
(1)
гдеи.. и Siu&st- напряжение возбуждения датчиков;
К - коэффициент трансформации;
vp - угол поворота подвижных частей;
из - частота питания.
Сигналы контроп.ируемого датчика с учетом преобразования СКВТ 11 будут равны
u;,()KUj-8inLpP p o 6 {)S(4) . )KUo-cos t3 t|)Pote-Hp5(v),
где ft - относительное неравенство коэфгфициентов трансформации контролируемого и эталонного датчиков;
рФп - смещение электрического нуля контролируемого датчика относительно эталонного;
РО (V) - погрешность контролируемого да-рчика, выраженная в электрических радианах
Q - угол поворота ротора СКВТ 11.
Тогда напряжение на выходе СКВТ 16 будет равно () + рД(
()д{.Ч )(3)
где л() - погрешность редуктора от СКВТ
16 до подвижных частей датчиков;
Т{г угол поворота электрических осей обмоток статора СКВТ 16 но отношению к некоторому начальному положению оси обмотки ротора.
Подставляя Уф из выражений (1) и (2 в выражение (3) получим: Ueb|x I Un{2co8
(-|- f Hp-r- -|-fV
+ n ,-e -рд-1|г | ; (4)
Если выбрать
Т-|1; ° получим«
ивых--КиД2б1п -со8 рд()--В| - -asitt(p(S-f)u) i(4-)
Для малых hj получим
,иД()б(С)-л(ф)-аЗ (5).
Из выражения (3) следует прелсде всего что выходной сигнал пропорционален первой степени коэффициента трансформации, что и является целью нашего предложения. Первое слагаемое Биквадратных скобках пропорцио- ;нально ошибке проверяемого датчика; второе - паразитный сигнал, обсуповпенный неидентичностью датчиков и погрешностью редуктора. Полученный сигнал переменного тока преобразуется в постоянный в фазочувствительном блоке и регистрируется в регистри рующем блоке 21. Датчик меток используется для масшта бирования погрешности по или служит командным устройством для регистрирующего блока. Поворотный механизм необходим для оценри погрешности, вносимой эталонным датчиком. Для этого может производиться съем нескольких кривых при различных взаимных положениях статоров проверяемого и эталонного датчиков и их обработк 1. Передаточное отношение от СКВ Т 16 к ротору эталонноТО датчика равно коэффицие ту электрической редукции датчиков. изобретения Предмет Устройство для проверки датчиков угло вых и линейных величин, содержащее двигатель, вал которого кинематически соединен с жестко соединенными подвижными частям эталонного и контролируемого датчиков, обмотки возбуждения которых подключены к источнику питания, и регистрирующий блок, отличающееся тем, что, с целью повышения точности проверки, в устройство введены синусно-косинусные вращающиеся трансформаторы, поворотный механизм, фазочувствительный блок и дар- ; чик меток; причем поворотный механизм , кинематически соединен с неподвижной частью контролируемого датчика, а обмотки синхронизации контролируемого датчика соответственно подключены к обмоткам возбуждения первого синусно-косинусного i вращающегося трансформатора, первая об- мотка синхронизации первого синусно-косинусного вращающегося трансформатора подключена к последовательно соединенным первой обмотке синхронизации эталонного датчика и первой обмотке синхронизации второго синусно-косинусного вращающегося трансформатора, а вторая обмотка синхронизации первого синусно-косинусного вращающегося трансформатора подключена соответ ственно к последовательно соединенным второй обмотке синхронизации эталонного датчика и второй обмотке синхронизации второго синусно-косинусного враихающегося трансформатора, обмотка возбуждения второго синусно-косинусного вращающегос i трансформатора подключена к первому входу фазочувствительного блока, второй вход которого подключен к источнику питания, а . выход - к первому входу регистрирующего блока, второй вход.которого подключен к датчика меток, кинематически соедиь ненному с валом двигателя и с подвижной частью второго синусно-косинусного вращаю-: щегося трансформатора, причем передаточнре, отношение от второго синусно-косинусного вращающегося трансформатора к подвижной части эталонного датчика равно коэффициенту электрической редукции датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
| Устройство для контроля погрешности вращаюшихся трансформаторов | 1972 |
|
SU451119A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
| СПОСОБ ВЗАИМНОЙ УСТАНОВКИ СИНХРОННОГО ДВИГАТЕЛЯ И СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1994 |
|
RU2079964C1 |
| Способ компенсации погрешностиСиСТЕМы диСТАНциОННОй пЕРЕдАчиуглА | 1977 |
|
SU830489A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |