(54) УСТРОЙСТВО ДЛЯ ПРОВЕРКИ МНОГОПОЛЮСНЫХ ДАТЧИКОВ УГЛА
12
связан с двухполюсным вращающимся трансформатором и с исполнительным двигателем, двухполюсный вращающийся трансформатор подключен к регистрирующему блоку через четвертый детектор, источник напряжения повь1щенной частоты подключен к роторам вспомогательного и эталонного многополюсных датчиков и ко вторым входам первого и третьего синхронного детектора.
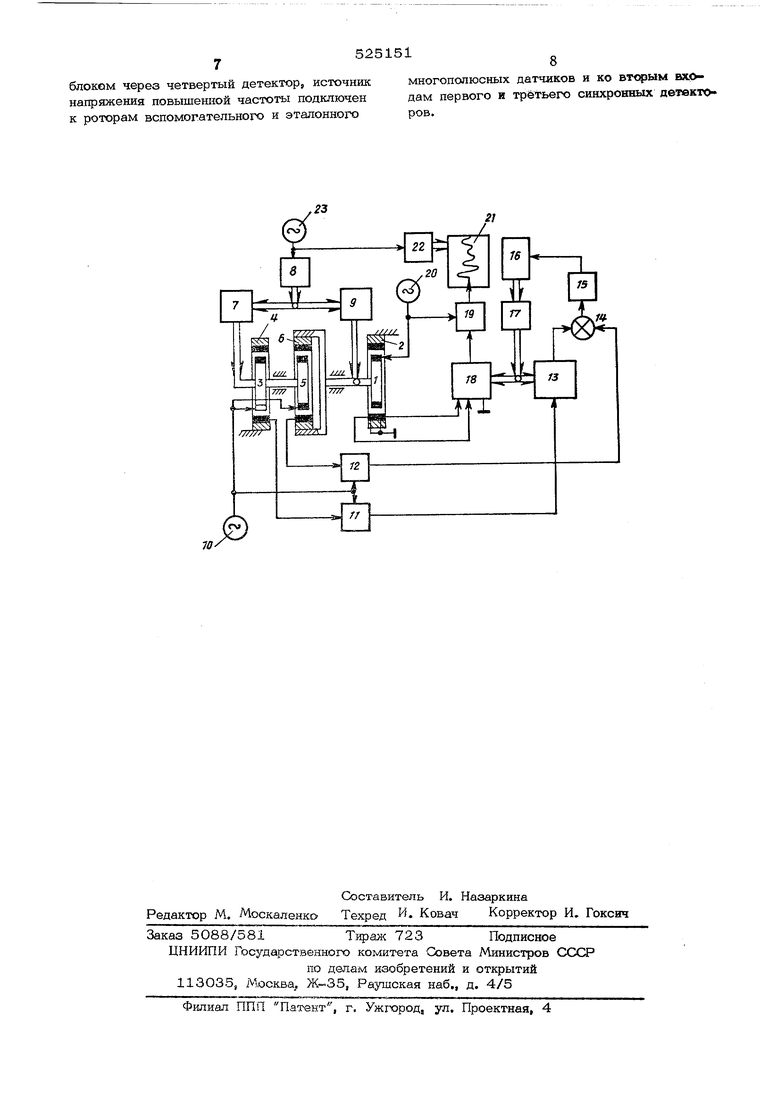
Схема предлагаемого устройства приведена на чертеже, где показан проверяемый многополюсный датчик, состоящий из ротора 1 с обмоткой (обмотки датчиков на рисунке условно показаны зачерненными участками) и статора 2 с синусной и косинусной обмотками. Вспомогательный многополюсный датчик состоит из ротора 3 и неподвижно закрепленного статора 4. Ротор вспомогателного датчика жестко связан с ротором 5 эталонного многополюсного датчика, статор
6которого выполнен подвижным и кинематически соединен (например через муфту) с ротором 1 проверяемого датчика. Ротор вспомогательного датчика 3 через редуктор
7соединен с валом синхронного двигателя 8, который через редуктор 9 связан также
с ротором 1 проверяемого датчика. Обмотки роторов 3 и 5 вспомогательного и эталоного датчиков подключены с целью бесконтактного токопровода через воздушные трансформаторы (на чертеже не показаны) к источнику напряжения повыщенной частоты
10(2О+ 50 кГц). Обмотка статора 4вспомогательного датчика соединена со входом первого синхронного детектора 11, а обмотк статора 6 эталонного датчика через воздушный трансформатор (на фиг. 1 не показан) подключена ко входу второго синхронного детектора 12. Вторые входы детекторо
11и 12 подключены к источнику напряже- ния повыщенной частоты 10. Выход первого синхронного детектора 11 связан со входом фазовращателя 13, выход которого подключен к одному входу третьего синхронного детектора 14, к другому входу которого подсоединен выход второго синхронного детектора 12. Выход детектора 14 соединен со входом усилителя 15, подключенного к исполнительному двигателю 16, кине матически связанному через редуктор 17 с ротором двухполюсного вращающегося трансформатора 18 и с ротором фаэоврашателя
13. Выход трансформатора подключен к одному входу четвертого синхронного детектора 19, другой вход которого соединен с источником питания 20 обмотки ротора проверяемо1Х) датчика (с частотой напряжения 500 Гц). Выход четвертого синхронного детектора связан с регистрирующим блоком 21. Синхронный двигатель 8 привода ротора проверяемого датчика подключен к источнику питания 23 ( с частотой напряжения 50 кГц) и через синхронний двигатель 22 протяжки бумажной ленты к регистрирующему блоку 21.
Проверяемый, эаталонный и вспомогательный датчики имеют одинаковое число Р пар полюсов (т. е. одинаковые коэффициенты электрической редукции). Эталонный и вспомогательный датчики могут быть идентичны проверяемому датчику, за исключением того, ч то их синусная и косинусная обмотки соединены последовательно,образуя одну обмотку на статоре (на чертеже сплошная зачерненная полоса в статорах 4,6).
Предложенное устройство работает следующим образом.
Синхронный двигатель 8 вращает через редуктор 9 ротор 1 проверяемого датчика с частотой вращения N (в об/с), а через редуктор 7 - роторы 3 и 5 вспомогательного и эталонного датчиков с частотой вращения П (в об/с). Передаточные отношени редук:торов 7 и 9 выбирают из условия: П .
При питании роторов 3 и 5 напряжением повышенной частоты (2О-5О кГц) с обмото статоров 4 и 6 снимаются индуцированные напряжения, балансно модулированные по амплитуде углом поворота роторов 3 и 5. Огибающие этих напряжений выделяются с помощью синхронных детекторов 11 и 12. При этом частота напряжения на выходе детектора 11
,
а частота напряжения на выходе детектора
(n+N)P(2)
Эти напряжения, одно непосредственно, а другое через двухполюсный фазовращатель 13, поступают на входы синхронного детектора 14, напряжение с выхода которого усиливается усилителем 15 и приводит во вращение исполнительный двигатель 16, передающий через редуктор 17 движение связанным роторам фазовращателя 13 и трансформатора-приемника 18. При вращени их с частотой вращения fl (в об/с) частота напряжения на выходе фазовращателя-приемника
3 . 2
пр.
в установившемся режиме работы частоты f 2 ff. напряжений, поступающих на вход детектора 14, должны быть равны, т, е. (n+N)p .(4) После упрощения выражения (4) получим Ппр Np . Из вьфажения (5) следует, что роторы машин 13 и 18 вращаются в р раз Jбыcтpee, чем ротор проверяемого датчика. При питании проверяемого датчика от сети с частотой напряжения 50 - 5ОО Гц выходные индуцированные напряжения на об мотках статора 2 балансно модулированы по амплитуде углом поворота ротора 1 по закону синуса и косинуса с частотой NPf6) Напряжения с обмоток статора 2 подают на схютветствуюшие синусную и косинусную статорные обмотки двухполюсного вращающегося трансформатора-приемника 18, ротор которого вращается с частотой вращени . При выполнении условия (5), а также при идеш1ьно точных проверяемом датчике и трансформаторе-приемнике 18 напряжение на выходе приемника 18 равно нулю, так как будет выполняться условие
т
-0.
П
пр
Если проверяемый датчик имеет погрешность, то условие tV) нарушается, на выходе трансформатора-приемника появляется напряжение, пропорциональное этой погрещности, которое преобразуется с помощью синхронного детектора 19 в сигнал медленно изменяющегося постоянного тока, записываемый с помощью регистрирующего блока 21 на бумажную ленту.
Питание синхронного двигателя 22 протяжки бумажной ленты от источника питания синхронного двигателя 8 привода ротора проверяемого датчика необходимо для получения на диаграммной бумажной ленте оси абсцисс, соответствующей углу поворота ротора проверяемого датчика. Ось ординат соответствует погрешности проверяемого датчика.
Погрешность предложеннохх) устройства складывается, главным образом из инструментальных погрешностей эталонного и вспомогательного датчиков, трансформатора 18 и фазовращателя 13. Погрешности эталонног и вспомогательного датчиков на порядок меньще погрешности проверяемого датчика, несмотря на их идентичность. Основной составляющей погрешности многополюсных трансформаторов является погрешность от неточФормула изобретения
Устройство для проверки многополюсных датчиков угла, содержащее эталонный многополюсный датчик, соединенный с редуктором, двухполюсный вращающийся трансформатор, усилитель, связанный с исполнительным двигателем, регистрирующий блок, соединенный с синхронным двигателем и привод, отличающееся тем, что, с целью повышения точности работы устройства в него введены двухполюсный фазовращатель, синхронные детекторы и вспомогательный многополюсный датчик,ротор которого жестко соединен с ротором эталонного многополюсного датчика и кинематически связан с его статором, который через первый синхронный детектор соединен с первым входом второго синхронного детектора, а статор вспомогательного многополюсного датчика через последовательно соединенные третий синхронный детектор и двухполюсный фазовращатель подключен ко второму входу второго синхронного детектора, выход которого связан с усилителем; двухполюсный фазовращатель кинематически связан с двухполюсным вращающимся трансформатором и с исполнительным двигателем, двухполюсный вращающийся трансформатор соединен с регистрирующим ности воспроизведения синусного и косинусного законов, имеющая пространственный характер (т. е. она связана с функциональным углом поворота ротора). В предложенном устройстве роторы 3 и 5 вспомогательного и эталонного датчиков не связаны с функциональным поворотом, а приводятся двигателем привода во вспомогательное вращение. Благодаря этому погрещность от неточности воспроизведения синусного и косинусного законов дриобретает временной характер, т. е. выражается в виде высщих гармоник формы выходного напряжения. Синхронные детекторы 11 и 12 выполняют функцию фильтрации этих гармоник. Кроъле этого дополнительная фильтрация обеспечивается демпфированием исполнительного двигателя 16. Погрешности, вносимые мащинами 13 и 18 малы, так как они уменьщаются в число раз, равное коэффициенту электрической редукции проверяемого датчика, т. е. в р раз. Например, при погрешности трансформатора 18, равной 2 , погрешность устройства при числе пар полюсов проверяемого датчика р 128
блоком через четвертый детектор, источник напряжения повышенной частоты подключен к роторам вспомогательного и эталонного
многополюсных датчиков и ко вторым вх.дам первого и третьего синхронных детекторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для дискретного заданияуглОВ пОВОРОТА ВАлА | 1979 |
|
SU824257A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Устройство для проверки фазовращателей | 1975 |
|
SU525997A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
2J
L
