1
Изобретение относится к автоматике и вычислительной технике и может применяться в системах преобразования информации.
Известны преобразователи аналоговых сигналов в угол поворота, содержащие измерительный блок, шаговый электродвигатель и электронную часть, состоящую из компаратора, генератора, блока переключения и блока управления, состоящего, в свою очередь, из реверсивного распределителя импульсов, блока согласования и блока усилителей.
Цель изобретения - повышение к.п.д., точности и устойчивости работы преобразователя.
Это достигается тем, что в преобразователь дополнительно введены коммутатор направления, коммутаторы поочередной и парной коммутаций, фиксатор алгоритмов, селектор алгоритмов и дискриминатор алгоритмов, причем первый и второй входы последнего подключены соответственно к первому и второму выходам компаратора, первый, второй и третий входы селектора алгоритмов соединены соответственно с первым н вторым выходами дискриминатора алгоритмов и с другим выходом измерительного блока, первый и второй выходы селектора алгоритмов-соответственно с первым и вторым входами фиксатора алгоритмов, к третьему входу которого подключен генератор импульсов, а первый, второй и третий выходы фиксатора алгоритмов соединены
соответственно с первыми входами коммугаторов поочередной и парной коммутаций и третьим входом блока переключения, первый и второй выходы которого подключены соответственно к первому и второму входам коммутатора направления, выход реверсивного распределителя импульсов соединен с третьим входом коммутатора направления и с вторым входом коммутатора парной коммутации, выход коммутатора направления подключен к второму входу коммутатора поочередной коммутации, выходы коммутаторов поочередной и парной коммутаций соединены соответственно с первым и вторым входами блока согласования.
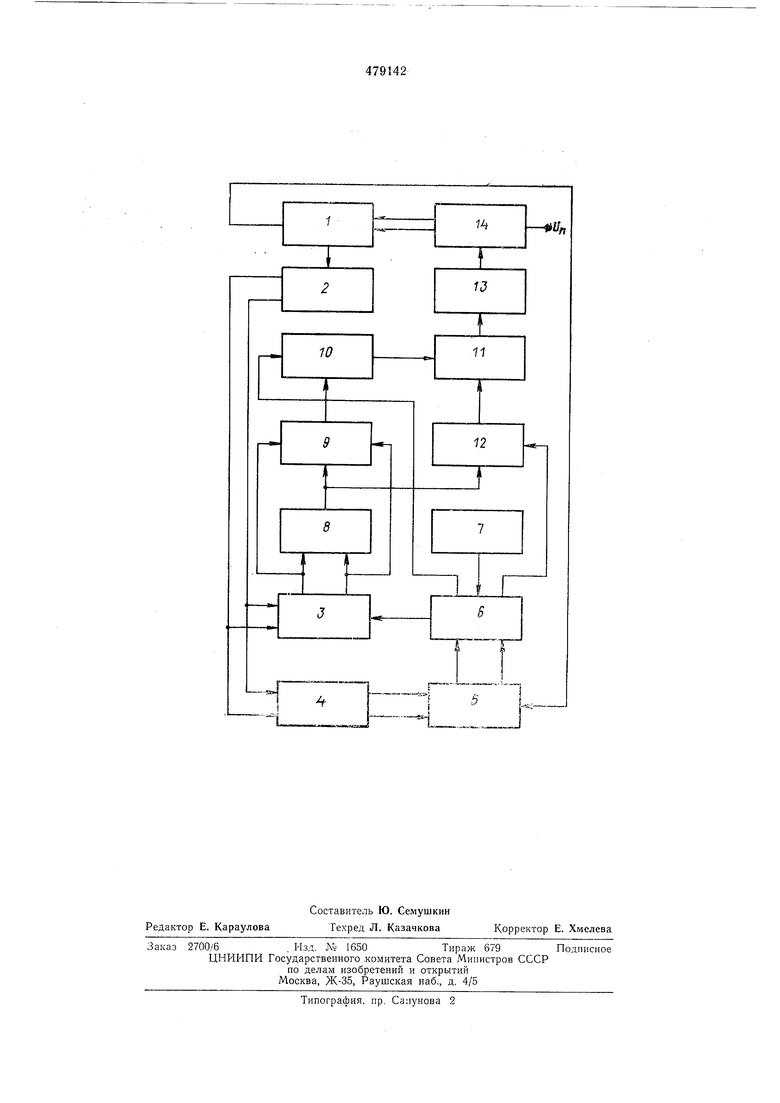
На чертеже представлена структурная схема предлагаемого преобразователя.
Преобразователь работает следующим образом.
Если при включении преобразователь находится в несогласованном состоянии, т. е. на первом выходе измерительного блока 1 имеется сигнал рассогласования, превышающий по величине зону нечувствительности компаратора 2, то на одном из его выходов в зависимости от знака рассогласования появляется потенциальный сигнал, который по первым или вторым входам управляет блоком переключения 3 и дискриминатором алгоритмов 4, последний на первом выходе формирует потенциальный сигнал на включение алгоритма парной коммутации. Этот сигнал по первому входу ностунает па селектор алгоритмов 5, который разрешает прохождение потенциального сигнала с первого выхода на нервый вход фиксатора алгоритмов б в случае отсутствия сигнала аварии на втором выходе измерительного блока 1. Наличие сигнала на первом входе фиксатора алгоритмов 6 обеспечивает прохождение импульсов управления от генератора 7 на третий вход блока переключения 3 и. далее на его выходы в зависимости от наличия сигнала соответственно на его входах. С выходов блока переключения 3 импульсы поступают на соответствующие входы реверсивного распределителя импульсов 8 и .одновременно на соответствующий вход коммутатора направления 9, который определяет текущее направление отработки рассогласования на основе информации, поступающей на входь реверсивного распределителя импульсов 8 и переключает своим выходом коммутатор поочередной коммутации 10 в состояние,- которое определяется этой информацией и состоянием реверсивного распределителя импульсов 8. При наличии сигнала на выходах компаратора 2 на нервом выходе фиксатора алгоритмов 6 сигнал отсутствует и, следовательно, отсутствует сигнал на входе коммутатора поочередной коммутации 10, что соответствует размыканию его по выходу с первым входом блока согласования 11, на второй вход которого в этом случае поступают управляющие сигналы с выхода коммутатора 12 парной коммутации, включение последнего по первому входу произведено сигналом с второго выхода фиксатора алгоритма 6. С вы-хода блока согласования 11 сигналы, соответствующие алгорнтму парной коммутации, поступают па вход блока усилителей 13, которые осуществляют коммутацию обмоток управления электродвигателя 14 в последовательности, обеспечивающей отработку сигнала рассогласования по кратчайшему пути в пределах синхропнзации измерительного блока до величины, не превышающей зону чувствительности -компаратора 2. В режи-, ме отработки рассогласования потребление электродвигателя 14 но шине питания не превосходит 0,6 РмаксНа такую мощность и должен быть рассчитан источник питаиия электродвигателя 14.
Вход преобразователя в зону нечувствительности приводит к исчезновению сигнала на любом из выходов компаратора 2, что прекращает прохождение импульсов от генератора 7 через фиксатор алгоритма 6 и блок переключения 3 на входы реверсивного распределителя импульсов 8. Снятие управляющих сигналов с обоих входов дискриминатора алгоритма 4 приводит к появлению втором выходе сигнала на включение алгоритма поочередной коммутации. Этот сигнал по второму входу поступает на селектор алгоритмов 5, который разрешает прохождение:сигнала с второго выхода па второй вход фиксатора алгоритмов 6 в случае отсутствия сигиала аварии на втором выходе измерительного блока 1. Наличие сигнала на втором входе фиксатора алгоритма 6 приводит к появлению управляющего сигнала на его выходе, который связан с первым входом коммутатора ноочередной коммутации 10, носледний через свой выход подключается к первому входу блока согласования 11 и далее к входу блока усилителей
13, которые отключают одну из двух включенных на предыдущем щаге обмоток управления электродвигателя 14, в результате чего его вал поворачивается на половину шагового интервала в направлении, задаваемом коммутатором направления 9. Коммутация обмоток электродвигателя 14 прекращается, его вал и подвижная часть измерительного блока 1 фиксируются, .преобразователь устаиавливается в состояние устойчивого равновесия, которому
соответствует алгоритм поочередиой коммутации обмоток управления электродвигателя 14. В этом состоянии потребление по шипе питания составляет 0,5 Ямакс. Таким образом, исключается в преобразователе режим фиксированной стоянки электродвигателя под током при алгоритме парной коммутации, когда его потребление по шине питания составляет Я.акс. Одновременно с этим повышается не менее, чем в два раза, позиционная точность преобразователя за счет то.о, что после прохождения валом электродвигателя 14 положепия, которое соответствует границе зоны нечувствительности компаратора 2, вал электродвигателя -14 смещается на нолщага внутри зоны нечувствительности, оптимальная величина которой из условия устойчивости выбирается обычно равной 3/4 шагового 1перемен1ения при парной коммутации обмоток. Что касается устойчивости релейной системы автоматического унравления, какой является предлагаемый преобразователь, то такой прием нозволяет ее увеличить, поскольку переход с алгоритма парной коммутации на поочередную при входе в зону нечувствительности эквивалентен уменьтению ее комплексного коэффициента усиления в два раза. С точки зрения теории управления реализацию такого алгоритма функционирования преобразователя при входе в зону нечувствительности компаратора 2 можно рас.сматривать как цифровую коррекцию нелииейной системы автоматического унравления.
Предлагаемое ностроение преобразователя обеспечивает коррекцию движения вала электродвигателя 14 и нри выходе системы из зоны нечувствительности компаратора 2. В этом случае нри появлении на выходе измерительного блока 1 сигнала рассогласования, нревышающего зону нечувствительности компаратора 2, производится перевод электродвигателя
14 на алгоритм парной коммутации. В случае, когда направление движения, предшествовавщее входу в зону нечувствительности, сохраняется и при выходе из иее, переход электродвигателя с алгоритма поочередной коммутации на парную вызывает смещение вала электродвигателя 14 на полшага в сторону отработки рассогласования; это обеспечивается за счет того, что появление сигнала на первом или втором входе дискриминатора алгоритмов 4 вызывает появление управляющего сигнала на его первом выходе, поступающего по первому входу на селектор алгоритмов 5, первый выход которого подготавливает срабатывание фиксатора алгоритма 6 при поступлении на его третий вход очередного управляющего импульса с генератора 7. Приход этого импульса переключает реверсивный распределитель импульсов 8 и устанавливает фиксатор алгоритмов 6 в состояние, при котором иа его втором выходе появляется сигнал, разрешающий по первому входу работу коммутатора 12 парпой коммутации, который через блок согласования 11 и блок усилителей 13 включает еще одну обмотку управления электродвигателя 14. В результате этого его вал смещается на полшага в сторону отработки рассогласования.
Аналогичным образом происходит взаимодействие узлов преобразователя и в том случае, когда направление движения при выходе из зоны нечувствительности противоположно направлению движения при входе в нее, т. е. когда производится прео&разоваиие знакопеременного входного сигнала. Особенностью работы электродвигателя 14 в этом случае является то, что его вал при выходе из зоны нечувствительности компаратора 2 поворачивается при первом пришедшем импульсе с генератора 7 на третий вход фиксатора алгоритмов 6 на полтора шага в направлении отработки рассогласо:заиия. В обоих рассмотренных случаях выхода из зоны первый импульс с генератора 7 служит для установки фиксатора алгоритмов 6 в состояние, соответствующее алгоритму парной коммутации. Эют импульс, пройдя на третий вход блока переключения 3, в зависимости от наличия сигнала на первом или втором его входах проходит с одного из выходов блока нереключения 3 на ссютветствуюнцш вход реверсивного расиредслителя импульсов 8, устаианливает его в состояние, С()ответству1ОИ1ее смещению вала электродвигателя 14 на шаг от того положения, которое бы этот вал занимал в состоянии устойчивого равновесия ири неизмешюм алгоритме управления, соответстаующем парной коммутации обмоток. Это дает возможность изменять величину первого перемеи ения вала электродвигателя 14 при входе и выходе из зоны нечувствительности за счет автоматического нереключения алгоритмов управления электродвигателя 14 ио сигналам дискриминатора алгоритмов 4, селектора алгоритмов 5, фиксатора алгоритмов 6, коммутатора иаправлеиия 9 и коммутаторов 10 и 12 относительно положения, которое в известных устройствах определяется только состоянием реверсивного распределителя импульсов 8. Такой характер Движения вала способствует увеличению точности и устойчивости устройства при преобразовании знакопеременных периодических сигиалов. При появлении на втором выходе измерительиого устройства 1 сигнала аварии через третий вход производится отключение селектора алгоритмов 5, который через фиксатор алгоритмов 6 одновременно отключает коммутаторы 10 и 12, что ведет к отключению блока
согласования 11 и блока усилителей iS. В этом случае электродвигатель 14 автоматически отключается от шины питания.
Предмет изобретения
Преобразователь аналоговых, сигналов в угол поворота, содержащий блок согласования, вы.ход которого через блок усилителей
подключается к обмоткам управления шагового электродвигателя, ва.л которого механически соединен с подвижной частью измерительного блока, выходом соединенного с входом компаратора, блок переключения, первый и
второй входы которого нодключеиы соответственно к первому И второму выходам компаратора, первый и второй выходы блока переключения соединены соответственно с первым и вторым входами реверсивного распределителя импульсов, и генератор импульсов, отличающийся тем, что, с целью повышения к.п.д., точностн и устойчивости работы преобразователя, он содержит коммутатор направления, коммутаторы поочередной и парной
коммутаций, фиксатор алгоритмов, селектор алгоритмов и дискриминатор алгоритмов, первый и второй входы которого подключены соответственно к первому и второму выходам компаратора, первый, второй и третий входы
селектора алгоритмов соединены соответственно с первым и вторым выходами дискриминатора алгоритмов и ic другим выходом измерительного блока, первый и второй выходы селектора алгоритмов соединены соответствеино с первым и вторым входами фиксатора алгоритмов, к третьему входу которого подключен генератор импульсов, а первый, второй и третий выходы фиксатора алгоритмов соединены соответственно с первыми входами коммутаторов поочередной и парной коммутаций и третьим входом блока переключения, первый и второй выходы которого подключены, соответственно к первому и второму входам коммутатора иаправ.тения, В151ход реверсивного
распределителя импульсов соединен с третьим входом коммутатора направления н с вторым входом коммутатора парной коммутации, выход коммутатора направления подключен к второму входу коммутатора поочередной коммутации, выходы |коммутаторов поочередной и парной коммутаций соединены соответственно с первым и вторым входами блока согласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1974 |
|
SU487438A1 |
| Дискриминатор нулевых биений | 1987 |
|
SU1524158A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Устройство синхронизации фаз сигналов двух генераторов | 1978 |
|
SU771886A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| ЫТ:ввитое** *У*ЬАМ. Кл. G 05Ь 11/14УДК 621.316.7(088.8) | 1973 |
|
SU408269A1 |