Изобретение относится к передачам с автоматическим и непрерывным изменением передаточного отношения, в которых для преобразования вращающего момента и передачи его от ведущего органа ведомому применены планетарные системы вращающихся масс эксцентрически расположенных и неуравновешенных грузов.
Согласно изобретению результирующая центробежных сил грузов прилагается к ведомому органу либо в точке, расстояние которой от оси вращения последнего меняется, либо в неподвижной точке на этом ведомом органе, в направлении, изменяющемся так, что получаются два последовательно и одинаково действующих на ведомый орган вращающих момента за время каждого полного цикла изменения указанной силы.
Для пояснения изобретения ниже приводятся теоретические соображения, на которых оно основано и которые иллюстрируются схематическими чертежами и диаграммами, изображенными на фиг. 1-7.
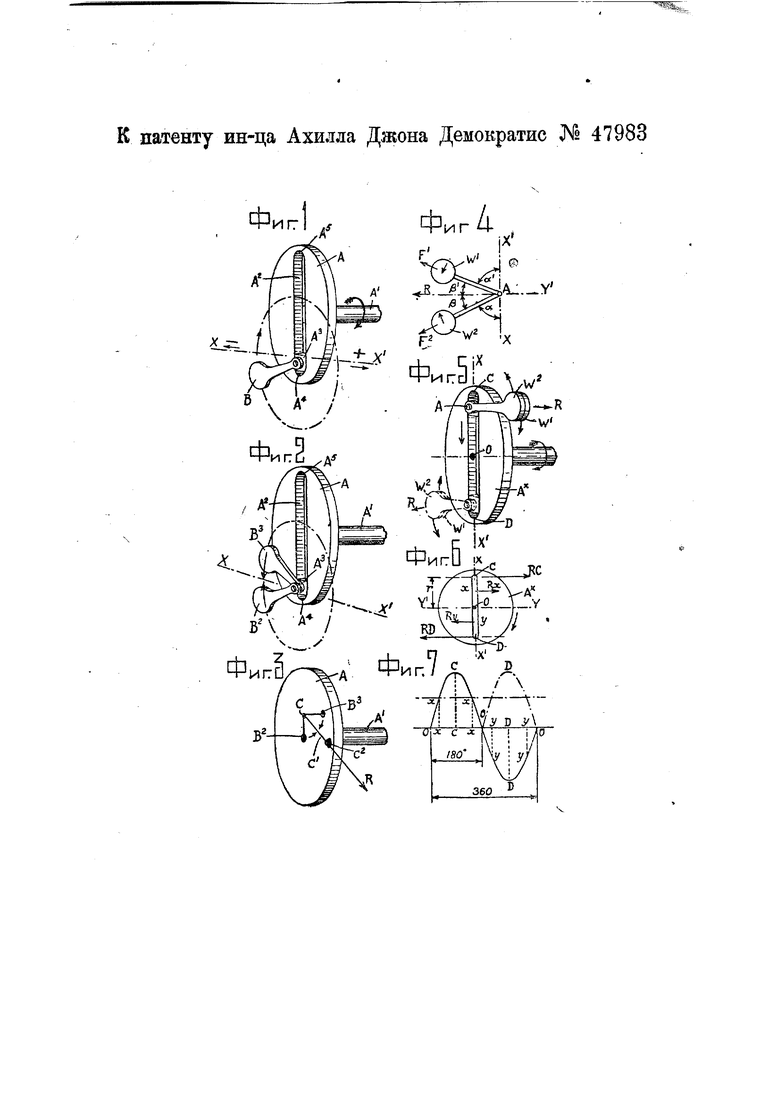
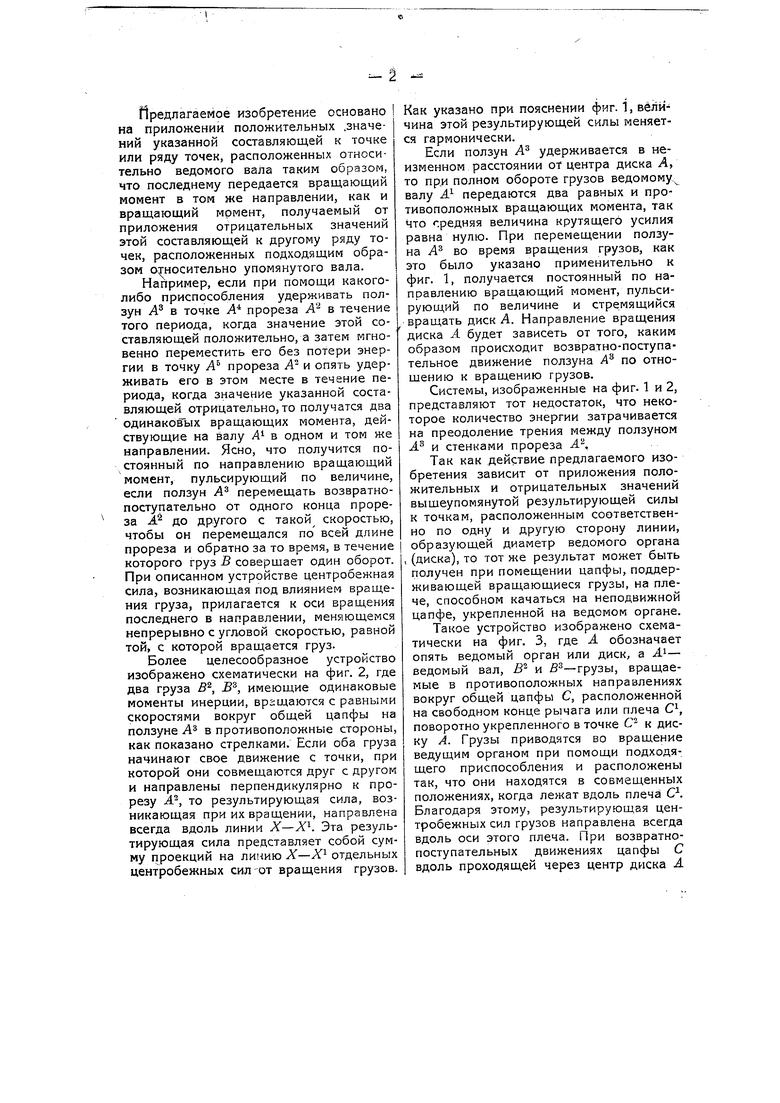
Обращаясь к фиг. 1, предположим, что ведомый орган состоит из диска А, укрепленного на валу А и снабженного диаметральным прорезом А, в котором
f33tt
помещается ползун Л с цапфой, служа щей осью вращения для неуравновешенного груза В. Если приводить во вращение груз В каким-либо подходящим приспособлением вокруг цапфы ползуна в плоскости, параллельной диску А, и удерживать ползун Л , несущий эту цапфу, у конца Х прореза А то сила, действующая на ползун Л , вследствие вращения массы В, даст составляющую вдоль линии X-Х, перпендикулярной к прорезу Л причем величина этой составляющей изменяется гармонически. В виду этого она будет переходить через два максимальных значения, из коих одно положительное, а другое отрицательное, причем одно из них достигается, когда ось груза или массы В направлена по линии , а другое- когда эта ось направлена по линии . Далее эта составляющая будет переходить также через два минимальных значения, каждое из которых равно нулю, когда ось груза В направлена вдоль прореза А. Очевидно, что средний вращающий момент, передаваемый валуЛ вследствие Вращения груза В, будет равен нулю, так как отрицательные и положительные значения направленной вдоль линии X-Х составляющей силы взаимно уничтожаются.
Предлагаемое изобретение основано на приложении положительных .значений указанной составляющей к точке или ряду точек, расположенных относительно ведомого вала таким образом, что последнему передается вращающий момент в том же направлении, как и вращающий момент, получаемый от приложения отрицательных значений этой составляющей к другому ряду точек, расположенных подходящим образом относительно упомянутого вала.
Например, если при помощи какоголибо приспособления удерживать ползун А в точке А прореза А в течение того периода, когда значение этой составляющей положительно, а затем мгновенно переместить его без потери энергии в точку А прореза Л и опять удерживать его в этом месте в течение периода, когда значение указанной составляющей отрицательно, то получатся два одинаковь1х вращающих момента, действующие на валу А в одном и том же направлении. Ясно, что получится постоянный по направлению вращающий момент, пульсирующий по величине, если ползун А перемещать возвратнопоступательно от одного конца прореза А до другого с такой скоростью, чтобы он перемещался по всей длине прореза и обратно за то время, в течение которого груз -В совершает один оборот. При описанном устройстве центробежная сила, возникающая под влиянием вращения груза, прилагается к оси вращения последнего в направлении, меняющемся непрерывно с угловой скоростью, равной той, с которой вращается груз.
Более целесообразное устройство изображено схематически на фиг. 2, где два груза В, Б, имеющие одинаковые моменты инерции, вращаются с равными скоростями вокруг общей цапфы на ползуне А в противоположные стороны, как показано стрелками. Если оба груза начинают свое движение с точки, при которой они совмещаются друг с другом и направлены перпендикулярно к прорезу А , то результирующая сила, возникающая при их вращении, направлена всегда вдоль линии X-Х. Эта результирующая сила представляет собой сумму проекций на линию X-Х отдельных центробежных сил-от вращения грузов.
Как указано при пояснении фиг. 1, величина этой результирующей силы меняется гармонически.
Если ползун А удерживается в неизменном расстоянии от центра диска А, то при полном обороте грузов ведомому.: валу А передаются два равных и противоположных вращающих момента, так что средняя величина крутящего усилия равна нулю. При перемещении ползуна Л во время вращения грузов, как это было указано применительно к фиг. 1, получается постоянный по направлению вращающий момент, пульсирующий по величине и стре.мящийся вращать диск Л. Направление вращения диска А будет зависеть от того, каким образом происходит возвратно-поступательное движение ползуна А по отношению к вращению грузов.
Системы, изображенные на фиг. 1 и 2, представляют тот недостаток, что некоторое количество энергии затрачивается на преодоление трения между ползуном А и стенками прореза А ,
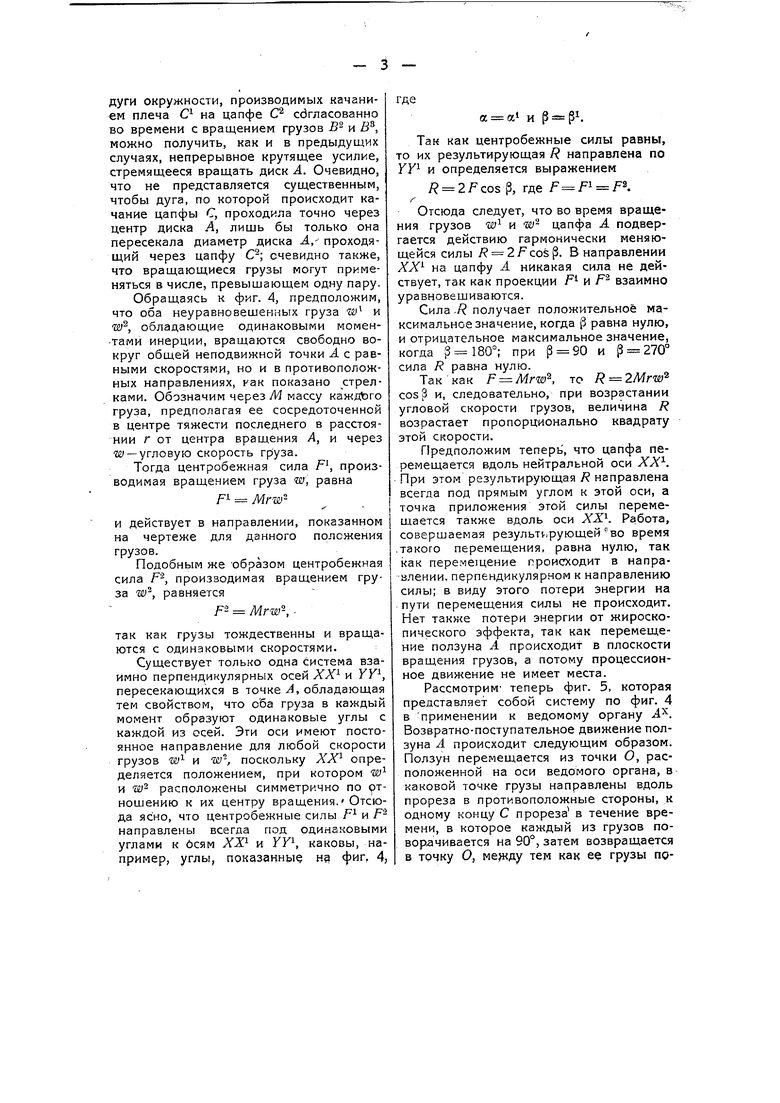
Так как действие предлагаемого изобретения зависит от приложения положительных и отрицательных значений вышеупомянутой результирующей силы к точкам, расположенным соответственно по одну и другую сторону линии, образующей диаметр ведомого органа (диска), то тот же результат может быть получен при помещении цапфы, поддерживающей вращающиеся грузы, на плече, способном качаться на неподвижной цапфе, укрепленной на ведомом органе.
Такое устройство изображено схематически на фиг. 3, где А обозначает опять ведомый орган или диск, а ведомый вал, В и В -грузы, вращаемые в противоположных направлениях вокруг общей цапфы С, расположенной на свободном конце рычага или плеча С поворотно укрепленного в точке С к диску А. Грузы приводятся во вращение ведущим органом при помощи подходящего приспособления и расположены так, что они находятся в совмещенных положениях, когда лежат вдоль плеча С Благодаря этому, результирующая центробежных сил грузов направлена всегда вдоль оси этого плеча. При возвратнопоступательных движениях цапфы С вдоль проходящей через центр диска А
дуги окружности, производимых качанием плеча С на цапфе С согласованно во времени с вращением грузов Б и S можно получить, как и в предыдущих случаях, непрерывное крутящее усилие, стремящееся вращать диск А. Очевидно, что не представляется существенным, чтобы дуга, по которой происходит качание цапфы С, проходила точно через центр диска А, лищь бы только она пересекала диаметр диска А,- проходящий через цапфу очевидно также, что вращающиеся грузы могут применяться в числе, превышающем одну пару.
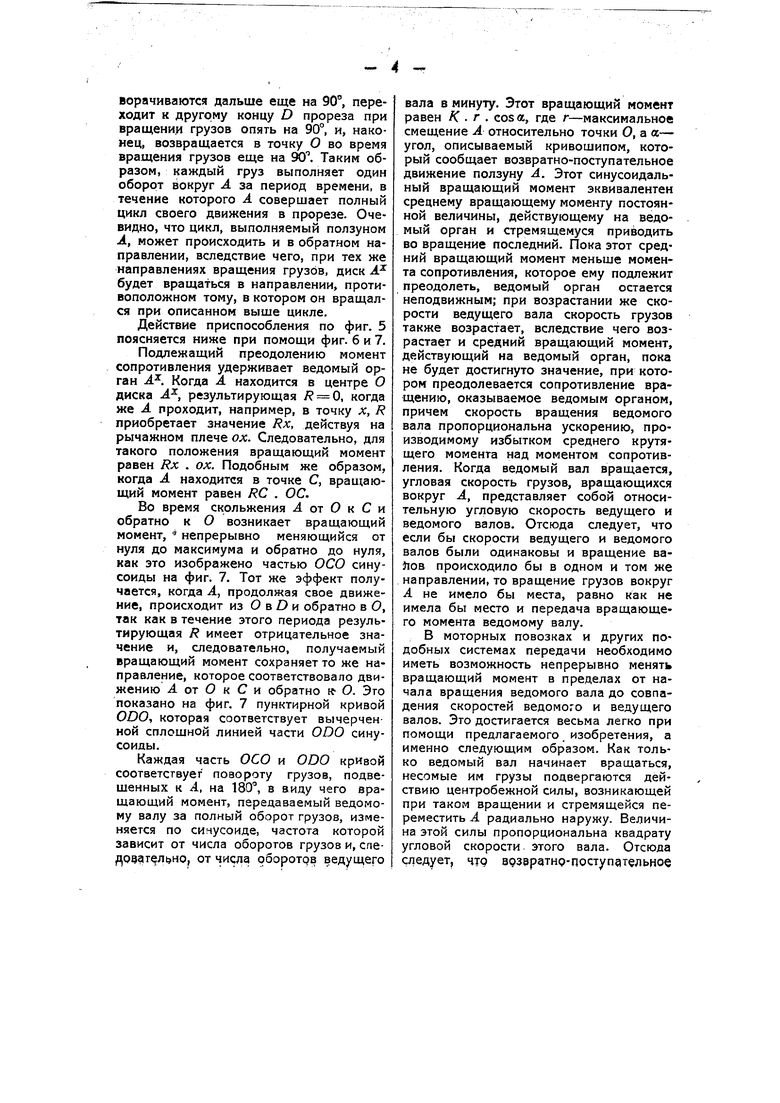
Обращаясь к фиг. 4, предположим, что оба неуравновешенных груза w и w, обладающие одинаковыми моментами инерции, вращаются свободно вокруг общей неподвижной точки А с равными скоростями, но и в противоположных направлениях, как показано стрелками. Обозначим через УИ массу каждого груза, предполагая ее сосредоточенной в центре тяжести последнего в расстоянии г от центра вращения А, и через ге -угловую скорость груза.
Тогда центробежная сила F, производимая вращением груза да, равна
f 1 Mrw
ff
и действует в направлении, показанном на чертеже для данного положения грузов.
Подобным же -образом центробежная сила , производимая вращением груза w, равняется
,
так как грузы тождественны и вращаются с одинаковыми скоростями.
Существует только одна система взаимно перпендикулярных осей ХХ и YY, пересекающихся в точке Л, обладающая тем свойством, что оба груза в каждый момент образуют одинаковые углы с каждой из осей. Эти оси имеют постоянное направление для любой скорости грузов w и да-, поскольку ХХ определяется положением, при котором w и йу расположены симметрично по ртношению к их центру вращения. Отсюда ясно, что центробежные силы F и Fнаправлены всегда под одинаковыми углами к беям Х и УК каковы, например, углы, показанные ка фиг, 4,
где
a ai и Р рЧ
Тан как центробежные силы равны, то их результирующая R направлена по yyi и определяется выражением
/ 2Fcosf, где F
Отсюда следует, что во время вращения грузов су и вд- цапфа А подвергается действию гармонически меняющейся силы / 2Fcos. В направлении ХХ на цапфу А никакая сила не действует, так как проекции F и F взаимно уравновешиваются.
Сила,/ получает положительное максимальное значение, когда Р равна нулю, и отрицательное максимальное значение, когда р при р 90 и 270° сила R равна нулю.
Так как , то / 2/Wrt2; cos и, следовательно, при возрастании угловой скорости грузов, величина R возрастает пропорционально квадрату этой скорости.
Предположим теперь , что цапфа перемещается вдоль нейтральной оси ЛАЧ При этом результирующая R направлена всегда под прямым углом к этой оси, а точка приложения этой силы перемещается также вдоль оси Работа, совершаемая peзyльт,pyющeй во время .такого перемещения, равна нулю, так как перемещение происходит в направлении, перпендикулярном к направлению силы; в виду этого потери энергии на пути перемещения силы не происходит. Нет также потери энергии от жироскопического эффекта, так как перемещение ползуна .4. происходит в плоскости вращения грузов, а потому процессионное движение не имеет места.
Рассмотрим- теперь фиг. 5, которая представляет собой систему по фиг, 4 в применении к ведомому органу А. Возвратно-поступательное движение ползуна А происходит следующим образом. Ползун перемещается из точки О, расположенной на оси ведомого органа, в каковой точке грузы направлены вдоль прореза в противоположные стороны, к одному концу С прореза в течение времени, в которое каждый из грузов поворачивается на 90°, затем возвращается в точку О, между тем как ее грузы поворачиваются дальше еще на 90°, переходит к другому концу D прореза при вращенки грузов опять на 90°, и, наконец, возвращается в точку О во время вращения грузов еще на ЗЮ. Таким образом, каждый груз выполняет один оборот йокруг А за период времени, в течение которого А совершает полный цикл своего движения в прорезе. Очевидно, что цикл, выполняемый ползуном А, может происходить и в обратном направлении, вследствие чего, при тех же направлениях вращения грузов, диск А будет вращаться в направлении, противоположном тому, в котором он вращался при описанном выше цикле.
Действие приспособления по фиг. 5 поясняется ниже при помощи фиг. 6 и 7.
Подлежащий преодолению момент сопротивления удерживает ведомый орган j4.. Когда А находится в центре О диска А, результирующая 0, когда же А проходит, например, в точку х, JR приобретает значение JRx, действуя на рычажном плече ох. Следовательно, для такого положения вращающий момент равен RX . ох. Подобным же образом, когда А находится в точке С, вращающий момент равен КС . ОС,
Во время скольжения от О к С и обратно к О возникает вращающий момент, непрерывно меняющийся от нуля до максимума и обратно до нуля, как это изображено частью ОСО синусоиды на фиг. 7, Тот же эффект получается, когда А, продолжая свое движение, происходит из О в D и обратно в О, так как в течение этого периода результирующая R имеет отрицательное значение и, следовательно, получаемый вращающий момент сохраняет то же направление, которое соответствовало движению А от О к С и обратно к О. Это показано на фиг, 7 пунктирной кривой ODOi которая соответствует вычерчен ной сплошной линией части ODO синусоиды.
Каждая часть ОСО и ODO кривой соответствует повороту грузов, подвещенных к А, на 180, в виду чего вращающий момент, передаваемый ведомому валу за полный оборот грузов, изменяется по синусоиде, частота которой зависит от числа оборотов грузов и, следочг|т Л1 но, от числа оборотрв ведущего
вала в минуту. Этот вращающий момент равен К . г . cos а, где г-максимальное смещение А относительно точки О, а а- угол, описываемый кривошипом, который сообщает возвратно-поступательное движение ползуну А. Этот синусоидальный вращающий момент эквивалентен среднему вращающему моменту постоянной величины, действующему на ведомый орган и стремящемуся приводить во вращение последний. Пока этот средний вращающий момент меньше момента сопротивления, которое ему подлежит преодолеть, ведомый орган остается неподвижным; при возрастании же скорости ведущего вала скорость грузов также возрастает, вследствие чего возрастает и средний вращающий момент, действующий на ведомый орган, пока не будет достигнуто значение, при котором преодолевается сопротивление вращению, оказываемое ведомым органом, причем скорость вращения ведомого вала пропорциональна ускорению, производимому избытком среднего крутящего момента над моментом сопротивления. Когда ведомый вал вращается, угловая скорость грузов, вращающихся вокруг А, представляет собой относительную угловую скорость ведущего и ведомого валов. Отсюда следует, что если бы скорости ведущего и ведомого валов были одинаковы и вращение вайов происходило бы в одном и том же направлении, то вращение грузов вокруг А не имело бы места, равно как не имела бы место и передача вращающего момента ведомому валу.
В моторных повозках и других подобных системах передачи необходимо иметь возможность непрерывно менять вращающий момент в пределах от начала вращения ведомого вала до совпадения скоростей ведомого и ведущего валов. Это достигается весьма легко при помощи предлагаемого изобретения, а именно следующим образом. Как только ведомый вал начинает вращаться, несомые им грузы подвергаются действию центробежной силы, возникающей при таком вращении и стремящейся переместить А радиально наружу. Величина этой силы пропорциональна квадрату угловой скорости этого вала. Отсюда следует, что возэратнр-поступательное
движение ползуна А симметрично относительно оси вращения ведомого вала, как уже указано выше, не вызывает какой-либо потери энергии, так как энергия, теряющаяся при скольжении А от С до О (фиг. 6), возращается системе во время скольжения J. от О до D.
Механизм, производящий возвратнопоступательное движение А, должен давать определенный крутящий момент для приведения А из положения С в положение О,. Если имеется противодействующий вращению момент со стороны нагрузки на ведомом органе и если этот момент меньше крутящего момента, даваемого указанным механизмом, то, очевидно, возвратно-поступательное движение А не будет иметь места, и оба вала ведущий и ведомый будут действовать тан, как будто они образуют одно целое, т, е. будут вращаться совместно с одинаковой скоростью. С другой стороны, если противодействующий момент больше или равен крутящему моменту, производимому двигателем, то происходит возвратно-поступателькое движение А, совершающееся без потери энергии, как указано выше.
Описанный передаточный механизм позволяет получать бесконечное число передаточных отношений, причем эти отношения могут меняться с соответствующим возрастанием крутящего момента ведомого вала от 1:1 до 1 : 5 и выше, в зависимости от постоянных параметров механизма, притом автоматически и непрерывно.
Для движения в обратном направлении (реверсирования) возможно применение той же передачи, как и при движении вперед, за исключением прямой передачи.
Очевидно, что при медленном вращении грузов передаваемый ведомому валу крутящий моменг имеет ничтожную величину. Отсюда следует, что для расцеплениЯх привода нет надобности применять муфту, и надо лишь просто затормозить .приток газов к двигателю.
Вышеприведенное теоретическое изложение принципа предлагаемого передаточного механизма относится к ведомому органу с прорезом,внутри которого скользит ось вращения грузов. Такое устройство, хотя оно теоретически совершенно, представляет на практике то неудобство, что оно вызывает потери на трение и некоторые конструктивные затруднения. Для устранения этих недостатков прорез заменяется плечом, несущим цапфу для поддерживания вращающихся грузов, каковое плечо может выполнять качания около неподвижной таэчки на ведомом органе симметрично относительно диаметра последнего, проходящего через центр качаний плеча. Нейтральная ось ХХ располагается перпендикулярно к плечу и все устройство действует так, как это было описано в связи с фиг. 3.
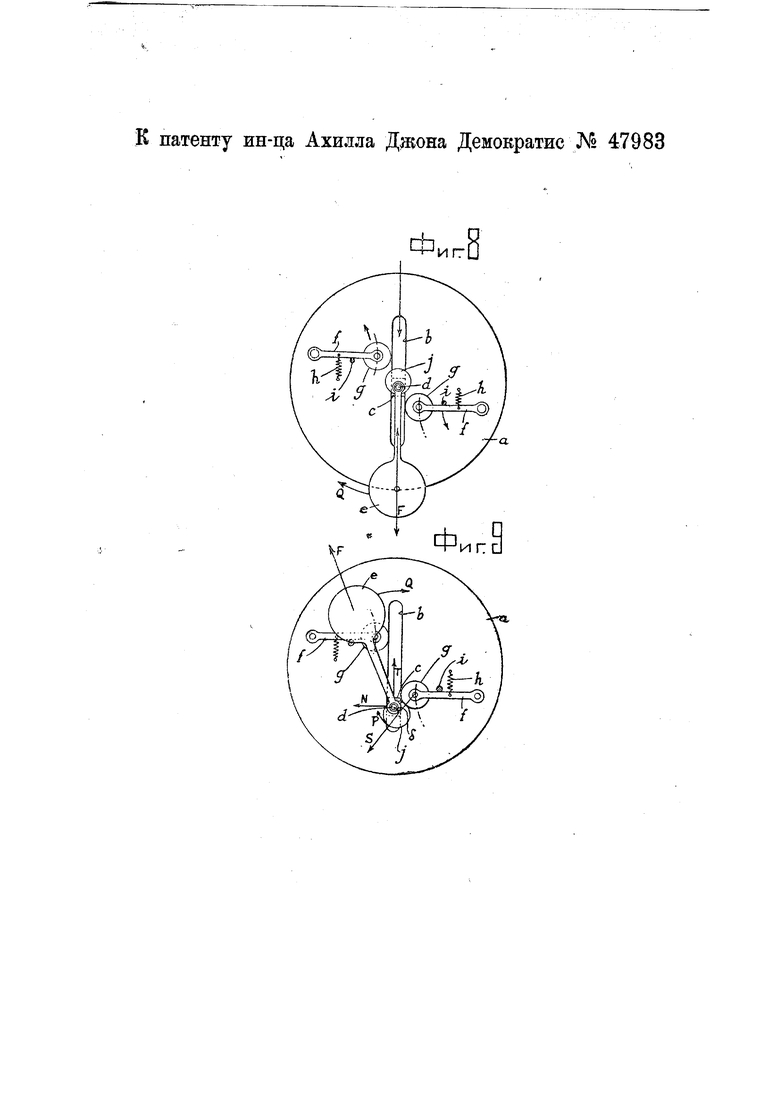
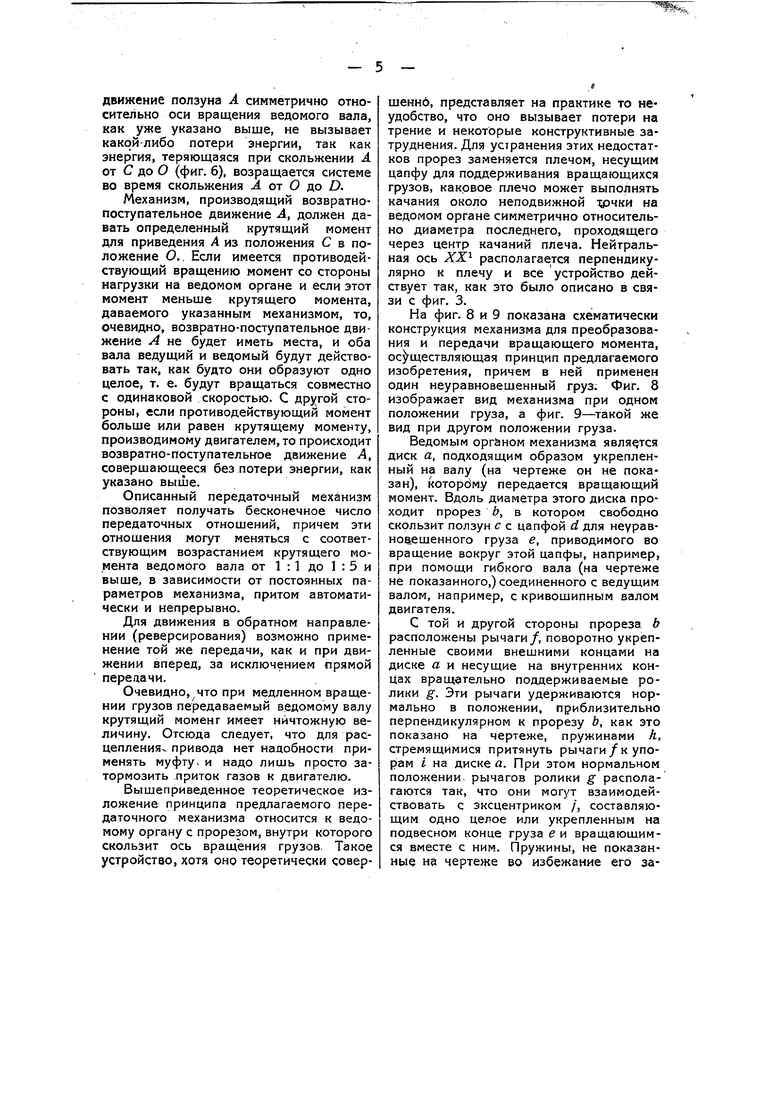
На фиг. 8 и 9 показана схематически конструкция механизма для преобразования и передачи вращающего момента, осуществляющая принцип предлагаемого изобретения, причем в ней применен один неуравновешенный груз. Фиг, 8 изображает вид механизма при одном положении груза, а фиг. 9-такой же вид при другом положении груза.
Ведомым оргйном механизма является диск а, подходящим образом укрепленный на валу (на чертеже он не показан), которому передается вращающий момент. Вдоль диаметра этого диска проходит прорез Ь, в котором свободно скользит ползун с с цапфой d для неуравновешенного груза е, приводимого во вращение вокруг этой цапфы, например, при помощи гибкого вала (на чертеже не показанного,) соединенного с ведущим валом, например, с кривошипным валом двигателя.
С той и другой стороны прореза b расположены рычаги/, поворотно укрепленные своими внешними концами на диске а и несущие на внутренних концах враЩЭтельно поддерживаемые ролики g. Эти рычаги удерживаются нормально в положении, приблизительно перпендикулярном к прорезу Ъ, как это показано на чертеже, пружинами h, стремящимися притянуть рычаги/к упорам i на диске а. При этом нормальном положении, рычагов ролики g располагаются так, что они могут взаимодействовать с эксцентриком /, составляющим одно целое или укрепленным на подвесном конце груза е и вращающимся вместе с ним. Пружины, не показанные на чертеже во избежание его затемнения, действуют на ползун обратно центробежной силе, стремясь удерживать последний в средней точке длины прореза Ь.
Описанное устройство действует следующим образом. При вращении груза е вокруг цапфы d в направле11ии стрелки Q возникает центробежная сила, действующая в направлении стрелки F. Когда груз приходит в положение, показанное на фиг. 8, эта сила действует вдоль прореза b и смещает ползун с, преодолевая сопротивление пружин, к тому концу, в сторону которого направлена сила F. Во время этого движения эксцентрик у проходит мимо ролика g, так как последний имеет свободу движения в сторону конца прореза b вокруг оси вращения рычага /.
Когда ползун находится в части прореза b между концом последнего и роликом g, сила F при продолжающемся вращении груза образует составляющую -Л, перпендикулярную к прорезу, величина которой возрастает приблизительно от нуля до максимума, когда груз сам также занимает перпендикулярное к прорезу положение, и затем начинает снова убывать до нуля. Понятно, что эта составляющая N, действуя на диск в некотором расстоянии от его центра, производит крутящий м,онент, стремящийся вращать этот диск.
Когда величина составляющей N убывает, величина другой составляющей Т центробежной силы в направлении длины прореза возрастает до максимума и стремится вернуть ползун с в центр диска а. Этому стремлению составляющей /содействует давление пружины, которая была сжата при перемещении ползуна с из центра диска к концу прореза Ь. Однако, положение эксцентрика у пока еще таково, что возвращению ползуна с препятствует сцепление этого эксцентрика с роликом g, продолжающееся до момента, когда груз е проходит далее положения, изображенного на фиг. 9.
Пока эксцентрик / удерживается роликом g, существует сила реакции S, направленная вдоль прямой, проходящей через точку их соприкосновения и через ось ролика, и пропорциональная величине слагающей Г и давления пружины,
сжатой перед тем во время перемещения ползуна с. Линия действия реакции S находится на расстоянии о (фиг. 9), считая в перпендикулярном к этой линии направлении, от оси вращения d эксцентрика/, вследствие чего реакции 5 стремится вращать указанный эксцентрик вокруг его оси в направлении стрелки Р (фиг. 9). Как видно из чертежа, направление Р совпадает с тем, в котором эксцентрик /, укрепленный на грузе е, уже вращается под действием ведущего вала (на чертеже не показанного). Следовательно, реакция S действует в смысле частичной разгрузки ведущего вала, и так как эта реакция частично создается пружиной, сжатой во время перемещения ползуна с, то поглощенная при таком перемещении энергия возвращается системе.
Когда груз е проходит дальше положения, изображенного на фиг. 9, эксцентрик У устанавливается относительно ролика g так, что позволяет ползуну с переместиться к другому концу прореза b под действием центробежной силы. Здесь опять происходят те же явления, какие описаны выше для одного конца прореза, причем вращающий момент, производимый составляющей Л, имеет то же направление, как и выше, благодаря тому, что самая составляющая имеет теперь обратное направление.
Из сказанного ясно, что при устройстве, изображенном на фиг. 8 и 9, возвратно-поступательное движение ползуна с происходит автоматически под влиянием центробежной силы, возникающей при вращении груза, и-что здесь имеет место периодическое возвращение системе той энергии, которая периодически поглощается при таком возвратнопоступательном движении.
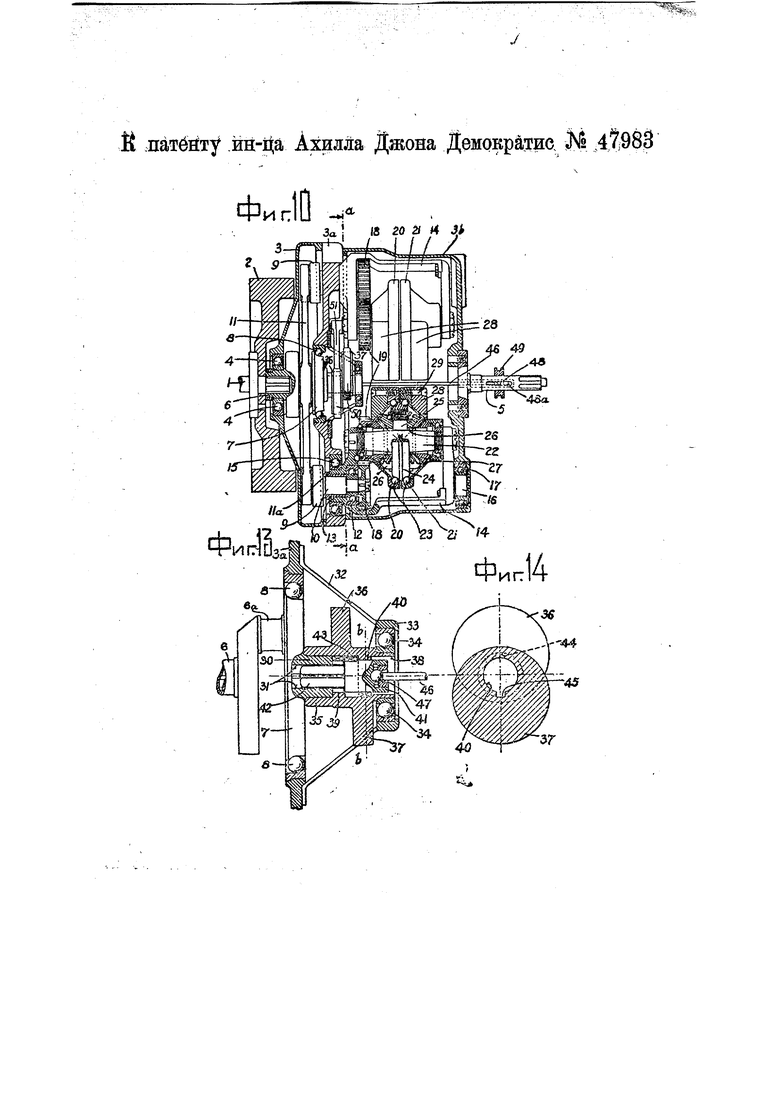
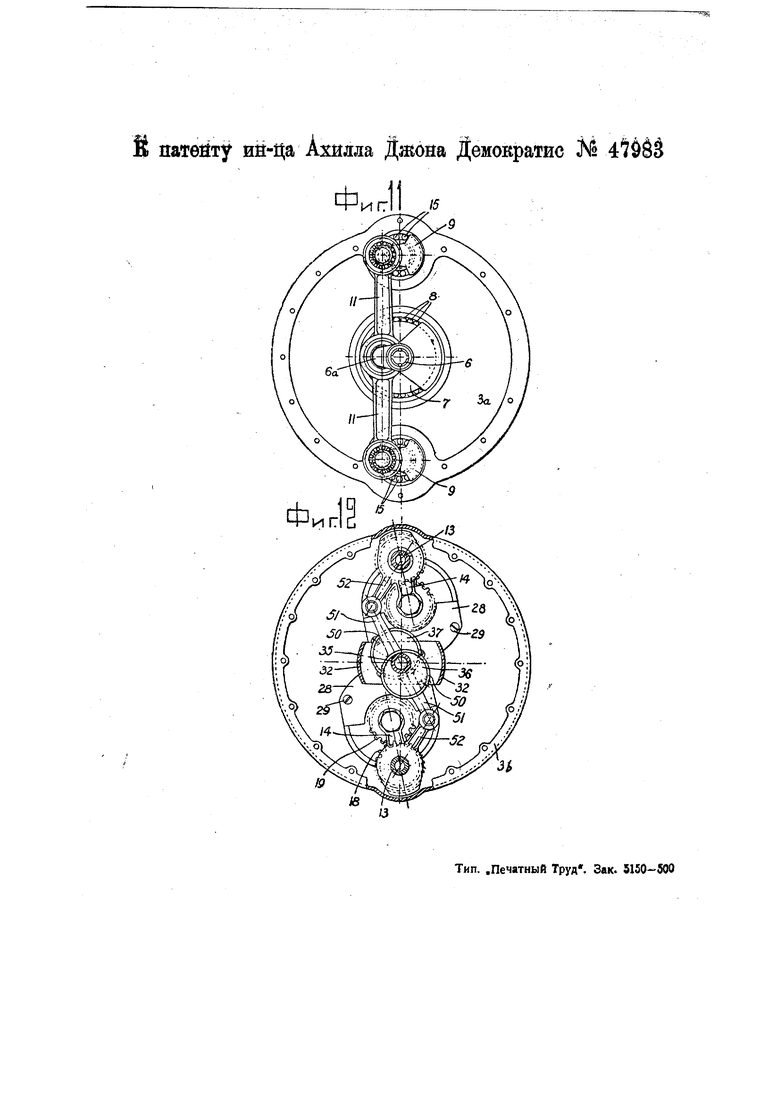
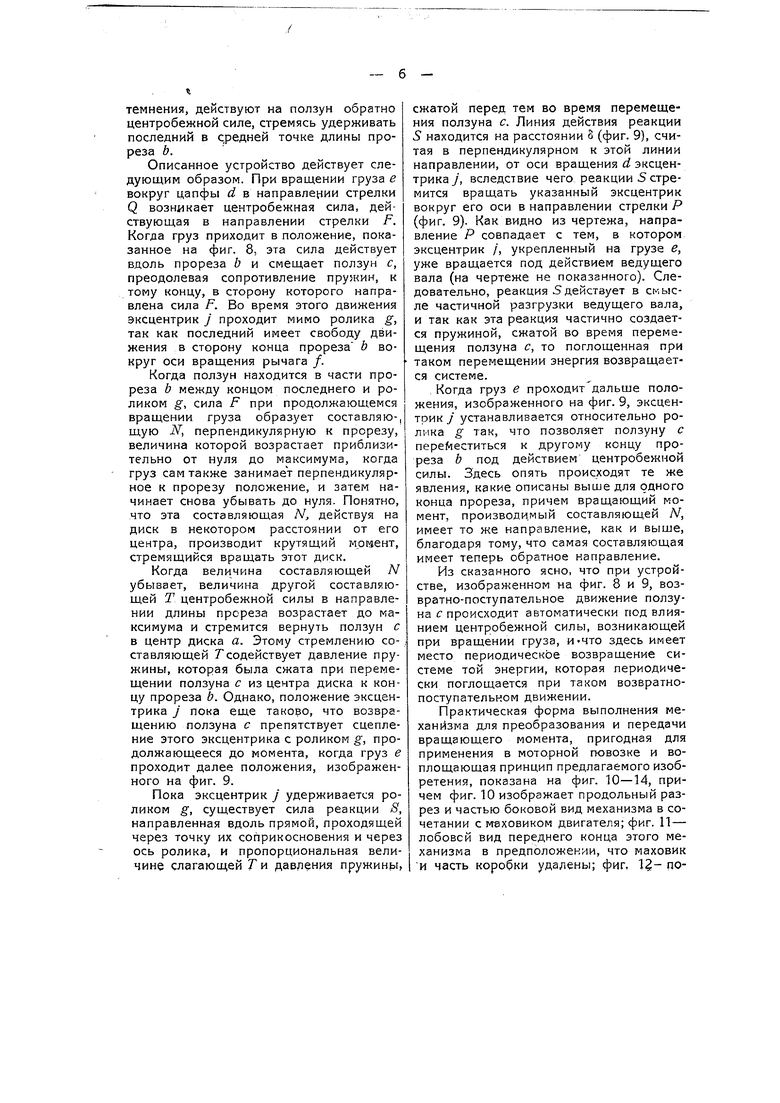
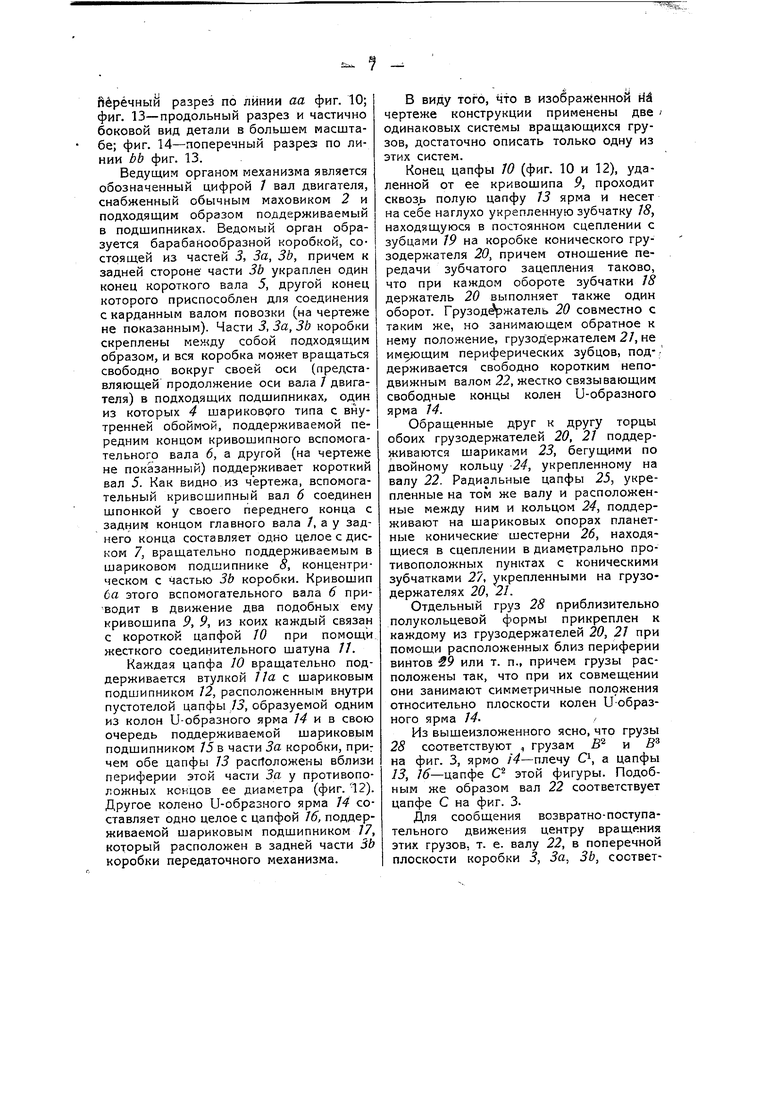
Практическая форма выполнения механизма для преобразования и передачи вращающего момента, пригодная для применения в моторной повозке и воплощающая принцип предлагаемого изобретения, показана на фиг. 10-14, причем фиг. 10 изображает продольный разрез и частью боковой вид механизма в сочетании с маховиком двигателя; фиг. 11 - лобовой вид переднего конца этого механизма в предположении, что маховик И часть коробки удалены; фиг, 12- поперечный разрез по линии аа фиг. 10; фиг. 13-продольный разрез и частично боковой вид детали в большем масштабе; фиг. 14-поперечный разрез; по линии ЬЬ фиг. 13.
Ведущим органом механизма является обозначенный цифрой 7 вал двигателя, снабженный обычным маховиком 2 и подходящим образом поддерживаемый в подшипниках. Ведомый орган образуется барабанообразной коробкой, состоящей из частей 3, За, ЗЬ, причем к задней стороне части ЗЬ украплен один конец короткого вала 5, другой конец которого приспособлен для соединения с карданным валом повозки (на чертеже не показанным). Части 3, За, ЗЬ коробки скреплены между собой подходящим образом, и вся коробка может вращаться свободно вокруг своей оси (представляющей продолжение оси вала / двигателя) в подходящих подшипниках, один из которых 4 шариковрго типа с внутренней обоймой, поддерживаемой передним концом кривошипного вспомогательного вала 6, а другой (на чертеже не показанный) поддерживает короткий вал 5. Как видно из чертежа, вспомогательный кривошипньж вал б соединен шпонкой у своего переднего конца с задним концом главного вала /, а у заднего конца составляет одно целое с диском 7, вращательно поддерживаемым в шариковом подшипнике 8, концентрическом с Частью ЗЬ коробки. Кривошип 6я этого вспомогательного вала 6 приводит в движение два подобных ему кривошипа 9, 9, из коих каждый связан с короткой цапфой 10 при помощи жесткого соединительного шатуна /7.
Каждая цапфа 10 вращательно поддерживается втулкой 7/а с шариковым подшипником 72, расположенным внутри пустотелой цапфы J3, образуемой одним из колон U-образного ярма 7- и в свою очередь поддерживаемой шариковым подшипником 7.5 в части За коробки, при: чем обе цапфы 75 расг1оложены вблизи периферии этой части За у противоположных концов ее диаметра (фиг. 12). Другое колено U-образного ярма 74 составляет одно целое с цапфой 76, поддерживаемой шариковым подшипником 77, который расположен в задней части ЗЬ коробки передаточного механизма.
В виду того, что в изображенной йй чертеже конструкции применены две одинаковых системы вращающихся грузов, достаточно описать только одну из этих систем.
Конец цапфы Ю (фиг. 10 и 12), удаленной от ее кривошипа 9, проходит сквозь полую цапфу 75 ярма и несет на себе наглухо укрепленную зубчатку 8, находящуюся в постоянном сцеплении с зубцами 7Р на коробке конического грузодержателя 20, причем отношение передачи зубчатого зацепления таково, что при каждом обороте зубчатки J8 держатель 20 выполняет также один оборот. Грузодфжатель 20 совместно с таким же, но занимающем обратное к нему положение, грузодержателем 27, не имущим периферических зубцов, поддерживается свободно коротким неподвижным валом 22, жестко связывающим свободные концы колен U-образного ярма 114.
Обращенные друг к другу торцы обоих грузодержателей 20, 27 поддер киваются шариками 25, бегущими по двойному кольцу -24, укрепленному на валу 22. Радиальные цапфы 25, укрепленные на том же валу и расположенные между ним и кольцом 24, поддерживают на шариковых опорах планетные конические шестерни 26, находящиеся в сцеплении в диаметрально противоположных пунктах с коническими зубчатками 27, укрепленными на грузодержателях 20, 21.
Отдельный груз 28 приблизительно полукольцевой формы прикреплен к каждому из грузодержателей 20, 21 при помощи расположенных близ периферии винтов 59 или т. п., причем грузы расположены так, что при их совмещении они занимают симметричные положения относительно плоскости колен U-образного ярма 14-,
Из вышеизложенного ясно, что грузы 28 соответствуют , грузам Б и S на фиг. 3, ярмо 14-плечу О, а цапфы 13, 16-цапфе О- этой фигуры. Подобным же образом вал 22 соответствует цапфа С на фиг. 3.
Для сообщения возвратно-поступательного движения центру вращения этих грузов, т. е. валу 22, в поперечной плоскости коробки 3, За, ЗЬ, соответfefeyiditieH Диску A на фиг. 3, предусмо трен следующий механизм.
Центральная втулка 30 (фиг. 13), направленная к задней стороне коробки 3, За, ЗЬ и устроенная на диске 7 вспомогательного кривошипного вала 6, снабжена осевым отверстием 31 квадратного сечения. Поддержки 32 несут кольцо 33, в котором монтирован шариковый подшипник 34 для заднего конца вращающегося вала 35, снабженного двумя одинаковыми и составляющими с ним одно целое эксцентриками 36 и 37, расположенными в средней части вала и смещенными друг относительно друга на угол в 180° (фиг. 14). Вал 35 снабжен также осевым сквозным отверстием 38 круглого сечения, образующим меньшие диаметры в местах 39 и 40, так что здесь получаются обращенные внутрь кольцевые ребра.
Диаметр отверстия переднего конца вала 55 таков, что этот вал свободно вращается на втулке 30, которая поддерживает вал у этого его конца. Для передачи вращения от втулки 30 валу 35, несущему эксцентрики, в оСевом отверстии этого вала помещен цилиндрический ползун 41, сцепляющийся с втулкой 30 при помощи квадратного продолжения -#2, скользящего в квадратном отверстии 31 и точно пригнанного к последнему. Радиальный зуб 43 у переднего конца ползуна 4f приспособлен для сцепления либо с гнездом 44 в ребре 39, либо с гнездом 45 в ребре 40, каковые гнезда, как показано на фиг. 14, смещены на 180° друг относительно друга вокруг продольной оси вала 55. Между ребрами 39 и «#0 поперечное сечение отверстия вала 55 таково, что зуб 43 может вращаться свободно внутри вала 55. Для сообщения необходимого продольного движения ползуну 4/ предусмотрен шатун 46, вращательно скрепленный с ползуном шаровым шарниром 47 и проходящий в осевом направлении части ЗЬ коробки сквозь отверстие в ее лобовой стенке и сквозь осевой канал вала 5 (фиг. 10), где этот шатун скреплен при помощи радиального штифта 48, проходящего сквозь продольные прорезы 48а вала 5, с муфтой 49, произвольно переставляемой при помощи вилки (на чертеже не показанной) вдоль оси вала 5.
Из сказанного йснб, 1г6 йоСдё eiftoмогательный вал 6 вращается, а ползун 4} занимает положение, показанное на фиг. 13, это вращение не передается валу 55. При перемещении ползуна 4/ влево (фиг. 13) описанным выше приспособлением зуб 43 упирается в боковую поверхность ребра 39, пока, вследствие вращения ползуна 4 относительно этого ребра, уб не придет в совпадение с гнездом 44 последнего. Затем зуб 43 приходит в сцепление с гнездом 44, вследствие чего вращение вспомогательного кривошипного вала 6 передается валу 55. При перемещении ползуна 4f вправо прежде всего происходит расцепление между зубом 43 и гнездом 44, после чего вал 55 перестает вращаться. Дальнейшее перемещение ползуна 4f вправо приводит зуб 43 в сцепление с гнездом 45 ребра 40 подобно тому, как это было описано выше для гнезда 44 в ребре 39. От этого происходит реверсирование порядка возвратно-поступательного движения центра вращения грузов по отношению к вращению последних, так что направление вращения ведомого,вала реверсируется, как описано выше в теоретической части.
Как видно из фиг. 10 и 12, каждый из эксцентриков 36, 37 окружен прворотным на нем хомутом 50 с шатуном 51, шарнирно соединенным у своего конца с хвостовиком 52, составляющим одно целое с тем коленом U-образного ярма 14, которое несет цапфу 13. Этот хвостовик расположен, как показано на фиг. 12, под углом к этому колену, но в одной плоскости с последним или же в плоскости, параллельной той, которая содержит указанное колено. Очевидно поэтому, что при вращении эксцентриков 55 и 57 шатунам 51 сообщается возвратно-поступательное движение, а эти шатуны, в свою очередь, передают качательное движение ярмам 14 вокруг их осей вращения 13, 16, Это качательное движение совершает один цикл за каждьш полный оборот эксцентриков.
Описанный выше механизм действует следующим образом. При нахождении ползуна 41 в положении, изображенном на фиг. 13, главный вал / приводится во вращение пуском в ход двигателя повозки. Вследствие вращения вала /
вращательное движение передается вспомогательному валу б, который приводит в движение кривошипы 9 через соединительный шатун 7/, вследствие чего вращаются цапфы 70 и зубчатые колеса /(.
Так как каждое из зубчатых колес 78 сцепляется с зубцами 79 на втулке одного из грузодержателей 20, то последний также вращается с угловой скоростью, равной скорости главного вала /, и вращает другой грузодержатель 27 с той же скоростью, но в противоположном направлении, благодаря реверсирующей передаче 27, 26, 27.
В это время эксцентрики 56, 57 не вращаются, поэтому оба ярма 74 не совершают качаний, так что создаются условия, при которых вращение грузов 28 вызывает два равных и взаимно противоположных крутящих момента на ведомом органе (коробка 5, За, ЗЬ) при -каждом обороте вала двигателя. Таким образом ведомый орган остается неподвижным и передаточный механизм находится в положении, которое можно назвать „нейтральным.
Если теперь ползун 47 переместить В положение, при котором его зуб 43 приходит в сцепление с одним из гнезд 44 или 45 вала, несущего эксцентрики, последние начинают вращаться и сообщать качательное движение ярмам 74 со скоростью, соответствующей скорости вращения грузов 28, центры вращения которых поддерживаются этими ярмами у их свободных или внутренних концов.
Как уже указано, результирующая центробежных сил, возникающих при вращении каждой пары грузов, расположена в плоскости, содержащей про.дольные оси колен соответствующего ярма.
Колебательное движение того и другого ярма 74 согласовано во времени с вращением грузов 28 таким образом, что значения результирующей, направленные в сторону цапф 73, получаются в течение того периода, когда каждое ярмо занимает положение, при котором центр вращения грузов лежит на одной стороне диаметральной плоскости коробки, проходящей через эти цапфы 75. Те же значения результирующей, которые направлены от цапф 75, получаются в течениетого периода, когда центр Вращения каждой пары .грузов 28 рас положен на противоположной стороне той же диаметральной плоскости kbr робки, причем понятно, что оба ярма совершают качания в противополож ных направлениях, как это видно на фиг. 12.Таким образом вращающие моменты, производимые этими значениями результирующих, действуют всегда в одном и том же направлении на коробку 5, За, ЗЬ стремясь привести ее во вращение.
При увеличении угловой скорости вала 6 возрастает скорость .вращения грузов 28, вследствие чего, как указано выше, увеличивается вращающий момент, действующий на коробку 5, За, ЗЬ, при чем работа передаточного механизма в сочетании с определенным направлением вращения коробки, вызь ваемым крутящим моментом, соответствует тому, как это уже было описано при пояснении диаграмм.,-
Когда требуется реверсировать направление вращения коробки 5, За, ЗЬ, передающей вращение карданному валу повозки при посредстве вала 5, достаточно только переместить ползун 41 в продольном направлэнии так, чтобь произошло расиепленче его зуба 43 с гнездом 44 или 45, с которым этот зуб находился в сцеплении, и сцепление его с другим гнездом 45 или 44. Это вызывает угловое смещение вала 55,. несущего эксцентрики, по отношению к главному валу 7 и вспомогательному валу б на половину оборота, как уже описано 1ше. Вследствие этого .значения- ре зультирующих, которые раньше были приложены к коробке 5, За, ЗЬ, когда .центры вращения грузов были располол ены по одной стороне диаметральной плоскости, проходящей через цапфы 73 того и другого ярма, прилагаются теперь к этой коробке, когда центры вращения грузов расположены с противоположной стороны этой плоскости. От этого, как легко видеть, реверсируется направление вращающего момента, производимого указанными результирующими, и, следовательно, коробка стремится вращаться в противоположном направлении по отношению к тому, в котором она вращалась до перестановки ползуна 47,
Различные особенности, характериг ющие предлагаемый механизм для передачи вращающего момента, уже были указаны при теоретическом исследовании его и не требуют здесь дальнейших пояснений.
Очевидно, что в некоторых случаях можно применить только одну пару грузов и что можно предусмотреть другие средства для передачи приводной силы от продолжения главного вала двигателя вращающимся грузам, например, цилиндрическое зубчатое колесо на указанном продолжении.
Предмет изобретения.
1.Передача с автоматическим изменением передаточного отношения, с применением планетарной системы вращающихся эксцентрично расположенных неуравновешенных грузов, отличающаяся тем, что цапфы вращения грузов в такт с частотой этого вращения совершают возвратно-поступательное или качательное движение по отношению к ведомому органу и притом таким образом, что центробежная сила вращающихся масс неуравновешенных грузов воздействует на ведомый орган только в одном направлении врашения последнего.
2.Форма выполнения передачи по п. 1, отличающаяся тем, что путь движения цапф вращения грузов расположен симметрично по отношению к оси вращения ведомого органа и проходит через эту ось (фиг. 1, 2, 5, б, 8 и 9).
3.Форма выполнения передачи по п. 1, отличающаяся тем, что цапфы вращения грузов расположены на , которые качаются вокруг пальцев, неподвижно укрепленных на ведомом органе на некотором расстоянии от оси вращения последнего (фиг. 3, 9-14).
4.Форма выполнения передачи по пп. 1-3, отличающаяся тем, что перемещение цапф грузов относительно ве-г домого органа осуществляется под действием центробежной силы, развиваю щейся при вращении этих грузов.
5.Форма выполнения передачи по пп. 1-4, отличающаяся тем, что цапфы грузов притягиваются при посредстве пружин к центру оси вращения ведомого органа,
6.Форма выполнения передачи по пп. 1-3, отличающаяся тем, что вращаю щийся около каждой цапфы груз составлен из двух вращающихся в противоположные стороны эксцентричных неуравновешенных масс (фиг. 2, 3, 4, 5, 10 и 12).
7.Форма выполнения передачи по пп. 1-3 и 6, отличающаяся тем, что результирующая центробежных сил вращающихся около каждой цапфы масс направлена перпендикулярно к пути перемещения этой цапфы относительно ведомого органа.
8.Форма выполнения передачи по пп. 1-6, отличающаяся тем, что цапфы грузов приводятся в возвратно-качатель ное движение при посредстве эксцентриков от ведущего органа (фиг. 10 и 12).
9.Форма выполнения передачи по пп. 1 - 8, отличающаяся тем, что изменение направления вращения ведомого органа осуществляется путем углового смещения эксцентриков на 180° по отношению к ведомому органу.
Фиг1 ,.фиг
- л А /RD
Ч./
Фиг х- /Фиг.7
уг
-ЧА
| название | год | авторы | номер документа |
|---|---|---|---|
| Передача между коаксиальными валами с автоматическим изменением передаточного отношения | 1930 |
|
SU47984A1 |
| Автоматическая переменная передача | 1934 |
|
SU50182A1 |
| Автоматическая прогрессивная передача | 1938 |
|
SU55072A1 |
| ЦЕНТРОБЕЖНАЯ МАШИНА ДЛЯ МЕТАНИЯ СНАРЯДОВ | 1927 |
|
SU7561A1 |
| КОРОБКА ПЕРЕДАЧ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2486389C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2016 |
|
RU2624137C1 |
| ЦЕНТРОБЕЖНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1997 |
|
RU2151331C1 |
| ВЕЗДЕХОД | 2008 |
|
RU2468957C2 |
| Центробежная муфта | 1990 |
|
SU1751535A1 |
| КОРОБКА ПЕРЕДАЧ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2012 |
|
RU2481511C1 |