Изобретение относится к механизмам для передачи вращения от движущего органа к ведомому органу, в которых передаточное отношение изменяется автоматически, будучи функцией нагрузки на указанном ведомом органе.
Известны уже механизмы для передачи вращения, которые заключают в себе преобразовательные присйособления, устроенные на вращающемся ведомом органе и действующие от движущего органа с целью получения усилия, меняющегося с числом периодов, пропорциональным скорости вращения движущего органа относительно ведомого, а также приспособления, предназначенные для получения свободного действия вышеприведенных преобразователей в течение той части каждого периода, когда усилие действует в одном из направлений, и для сопротивления работе указанных преобразователей в течение другой части периода, когда названное усилие действует в другом направлении, причем усилие прилагается к ведомому органу в точке, находящейся на некотором расстоянии от оси вращения этого органа.
В предлагаемом механизме передачи отрицательные значения названного усилия прилагаются таким образом к при(339)
способлениям сопротивления, что на ведомом органе получаются течение полного периода два последовательно и сходно работающих усилия.
Вышеуказанное переменное усилие может быть создано путем вращения или колебательного движения неуравновешенной массы около опорной точки или путем комбинирования колебания неуравновешенной массы около опорной точки и вращения другой неуравновешенной массы по эллиптическому или иному пути, каковые массы во всех случая получают движение оТ ведущего органа посредством соответствующих приспособлений.
Говоря подробнее, эти движущие и ведомые органы могут целесообразно заключать в себе ведущий вал на одной линии с ведомым валом, причем на последнем заклинивается диск или т. п., имеющий на некотором расстоянии от своей оси вращения цапфу, около которой вращается или качается неуравновешенная масса, каковая масса должна создать крутящий момент, а указанная цапфа образует ту точку, через которую положительные значения переменного усилия и положительные реакции передаются ведомому органу в силу приложения отрицательных значений указанного усилия к соответствующим стопорным приспособлениям.
В соответствии с настоящим изобретением стопорное приспособление, где поглощаются отрицательные значения переменного усилия, может до известной степени находиться под действием произведенного усилия, а получающееся при этом движение может быть преобразовано в дополнительный импульс для ведомого органа в положительном направлении, т. е. в направлении вращения этого органа.
На чертеже фиг. 1, 2 и 3 изображают диаграммы, иллюстрирующие теоретические обоснования принципов работы механизма передачи, согласно настоящему изобретению; фиг. 4-схематический вид обратимого стопорного приспособления, работающего в одном направлении, в применении к настоящему изобретению; фиг. 5-разрез детали в измененном стопорном приспособлении, работающем в одном направлении; фиг. 6-сходное с фиг. 5 приспособление, являющееся усоверщенствованием; фиг. 7-деталь нового- варианта приспособления взамен таковых по фиг. фиг. 8 представляет другую конструкцию вирианта приспособления по фиг. 7; фиг. 9-продольный вертикальный разрез конструкции комплектного передаточного механизма согласно изобретению; фиг. 10-разрез той же конструкции по линии 10-Ю фиг. 9; фиг. 11 - аналогичный разрез по линии //-11 фиг. 9, причем некоторые части устройства опущены; фиг. 12-деталь стопорного приспособления для работы в одном направлении, заключенного в передаточном механизме по фиг. 9-11; фиг. 13 и 14-осевой разрез и торцевой вид варианта детали стопорного приспособления; фиг. 15-торцевой вид детали, относящейся к контрольному кулачку, примененному в связи со стопорными приспособлениями для работы в одном направлении.
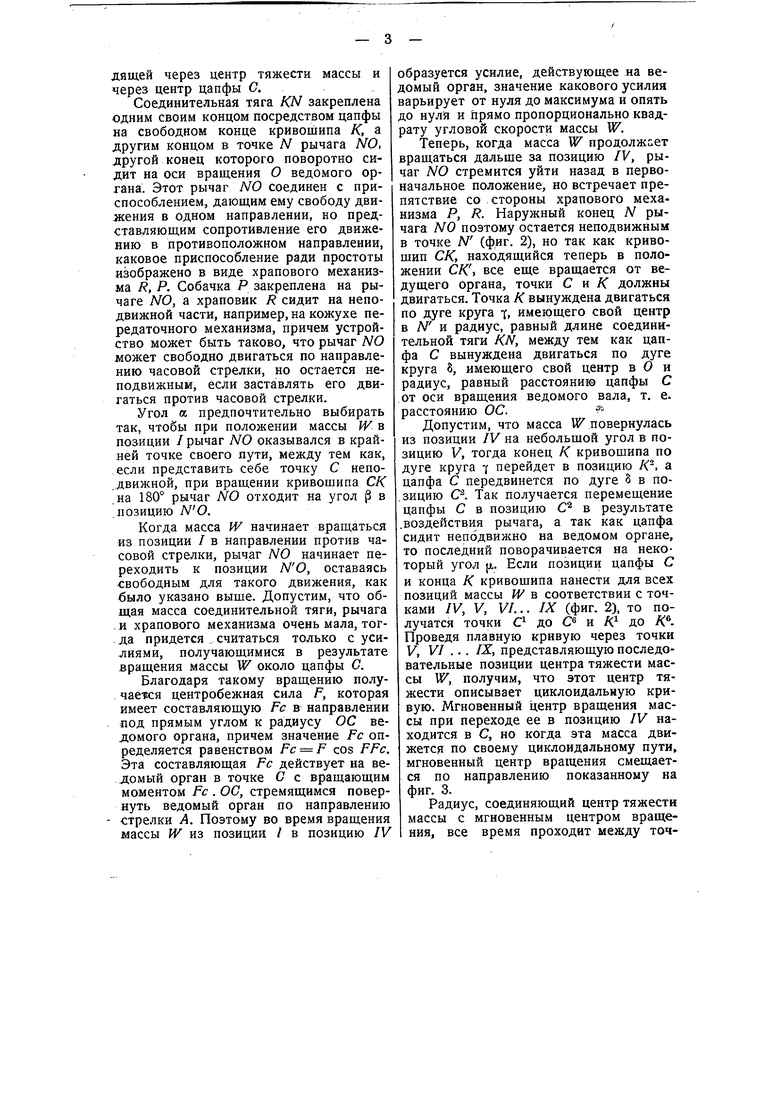
Для ясности изложения предварительно приводятся вкратце те основные принципы, которые лежат в основе изобретения и иллюстрируются при помощи диаграмм (фиг. 1-3.) Неуравновешенная масса приводится при помощи особых средств от вращающегося движущего органа во вращение, причем центр вращения массы меняется в определенном взаимоотнощении с самим вращением, в результате чего получаются два последовательных и сходно действующих момента на вращаемом ведомом органе для каждого полного оборота инертной массы.
Один из моментов может быть вызван на ведомом органе путем установления центра вращения инертной массы в точке на ведомом органе на некотором расстоянии от его оси вращения в течение половины полного оборота названной массы, так что центробежная сила вращения массы около этой точки создает вращающий момент для ведомого органа.
Для того, чтобы образовать второй момент на ведомом органе, заставляют инертную массу вращаться около другого центра в течение второй половины полного ее оборота таким образом, что, с одной стороны, центробежная сила вращения массы около указанного нового центра (каковая центробежная сила по существу образует обратный момент по сравнению с первым вращающим моментом) прилагается к неподвижной или относительно неподвижной точке или к точкам и поглощается здесь или используется для образования движущего импульса н ведомом органе, а с другой стороны, приспособления, вызывающие вращение массы около этого центра, воздействуют на точку ведомого органа на некотором расстоянии от оси вращения последнего, чтобы создать второй вращающий момент для ведомого органа в том же направлении, как и первый выщеупомянутый вращающий момент.
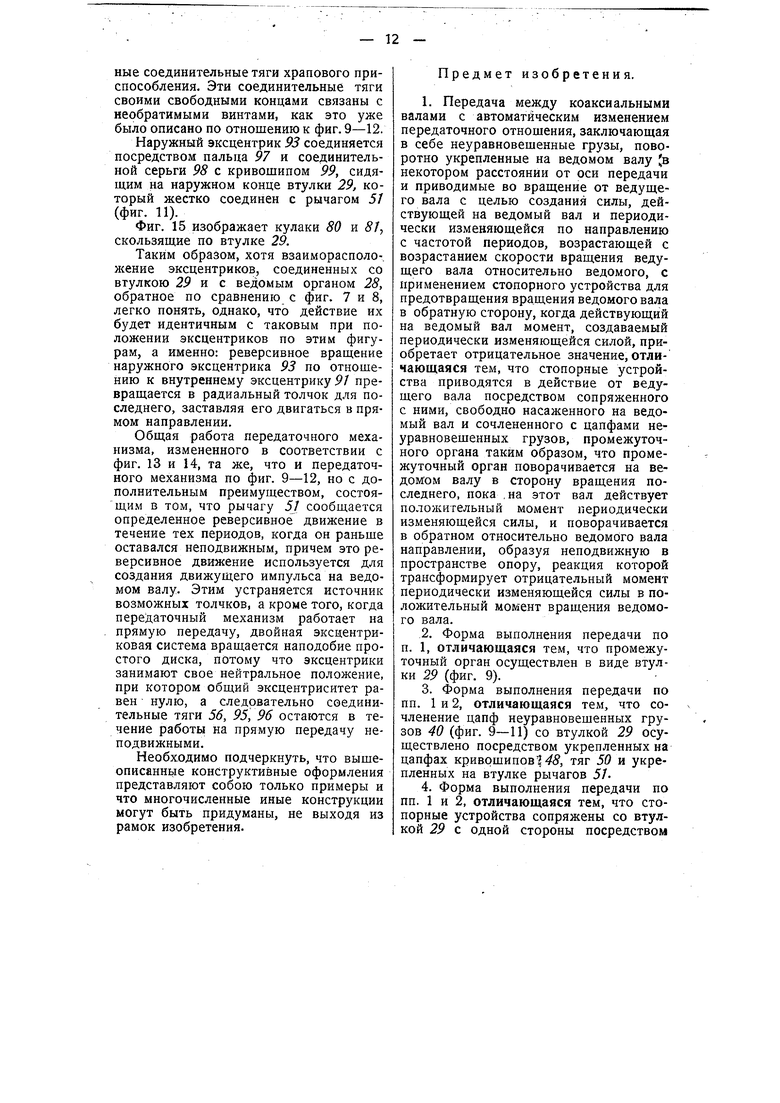
Применительно к только что указанному основному принципу рассмотрим теоретический пример со ссылкою на диаграммы, из которых фиг. 1 изображает неуравновещенную массу W, вращаемую в направлении против часовой стрелки около цапфы С на ведомом органе, ось вращения которого показана в О. Масса W, вращаемая от ведущего органа посредством особых не показанных на чертеже устройств, имеет, на своем конце с цапфой кривощил СЛ, образующий угол а с линией, проходящей через центр тяжести массы и через центр цапфы С.
Соединительная тяга /(Л/ закреплена одним своим концом посредством цапфы на свободном конце кривошипа К, а другим концом в точке N рычага NO, другой конец которого поворотно сидит на оси вращения О ведомого органа. Этот рычаг NO соединен с приспособлением, дающим ему свободу движения в одном направлении, но представляющим сопротивление его движению в противоположном направлении, каковое приспособление ради простоты изображено в виде храпового механизма R, Р. Собачка Р закреплена на рычаге NO, а храповик / сидит на неподвижной части, например, на кожухе передаточного механизма, причем устройство может быть таково, что рычаг может свободно двигаться по направлению часовой стрелки, но остается неподвижным, если заставлять его двигаться против часовой стрелки.
Угол а предпочтительно выбирать так, чтобы при положении массы Ж в позиции / рычаг NO оказывался в крайней точке своего пути, между тем как, если представить себе точку С непо.движной, при вращении кривошипа С/С .на 180° рычаг NO отходит на угол р в позицию NO,
Когда масса JV начинает вращаться из позиции / в направлении против часовой стрелки, рычаг NO начинает переходить к позиции NO, оставаясь свободным для такого движения, как было указано выше. Допустим, что общая масса соединительной тяги, рычага и храпового механизма очень мала, тог.да придется .считаться только с усилиями, получающимися в результате вращения массы W около цапфы С.
Благодаря такому вращению получается центробежная сила F, которая имеет составляющую Fc в направлении под прямым углом к радиусу ОС ведомого органа, причем значение Fc определяется равенством Fc F cos FFc. Эта составляющая Fc действует на ведомый орган в точке С с вращающим моментом FC . ОС, стремящимся повернуть ведомый орган по направлению стрелки А. Поэтому во время вращения массы IV из позиции / в позицию IV
образуется усилие, действующее на ведомый орган, значение какового усилия варьирует от нуля до максимума и опять до нуля и прямо пропорционально квадрату угловой скорости массы W.
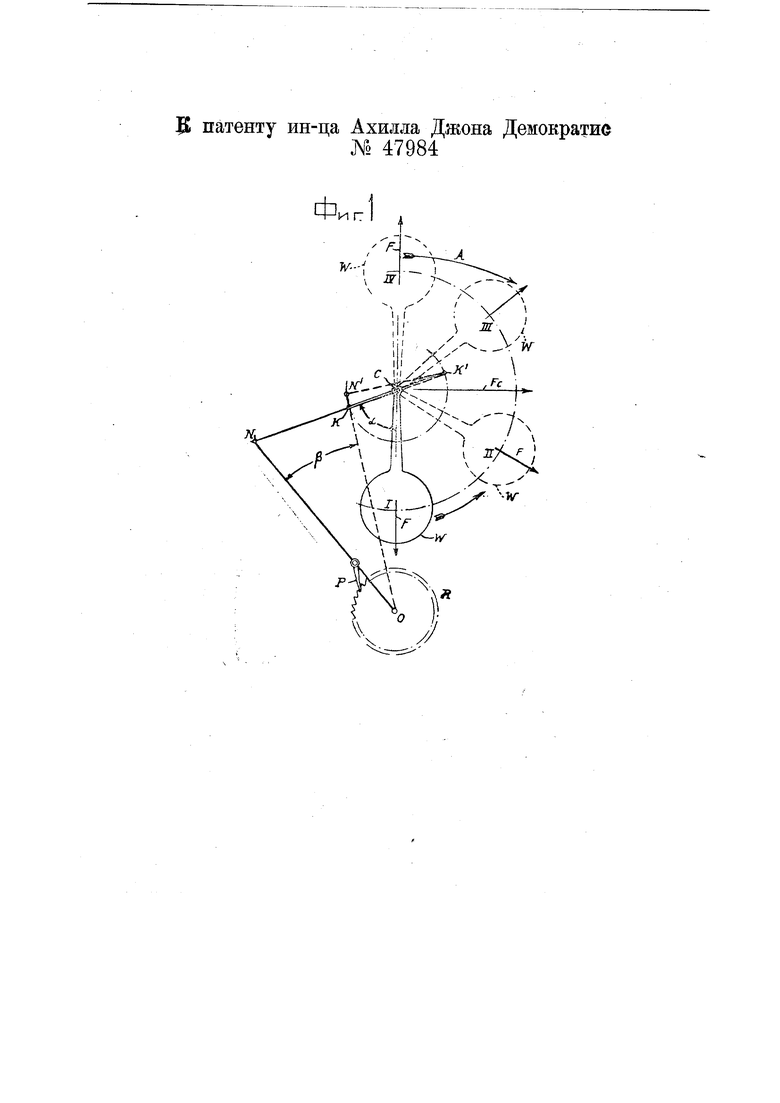
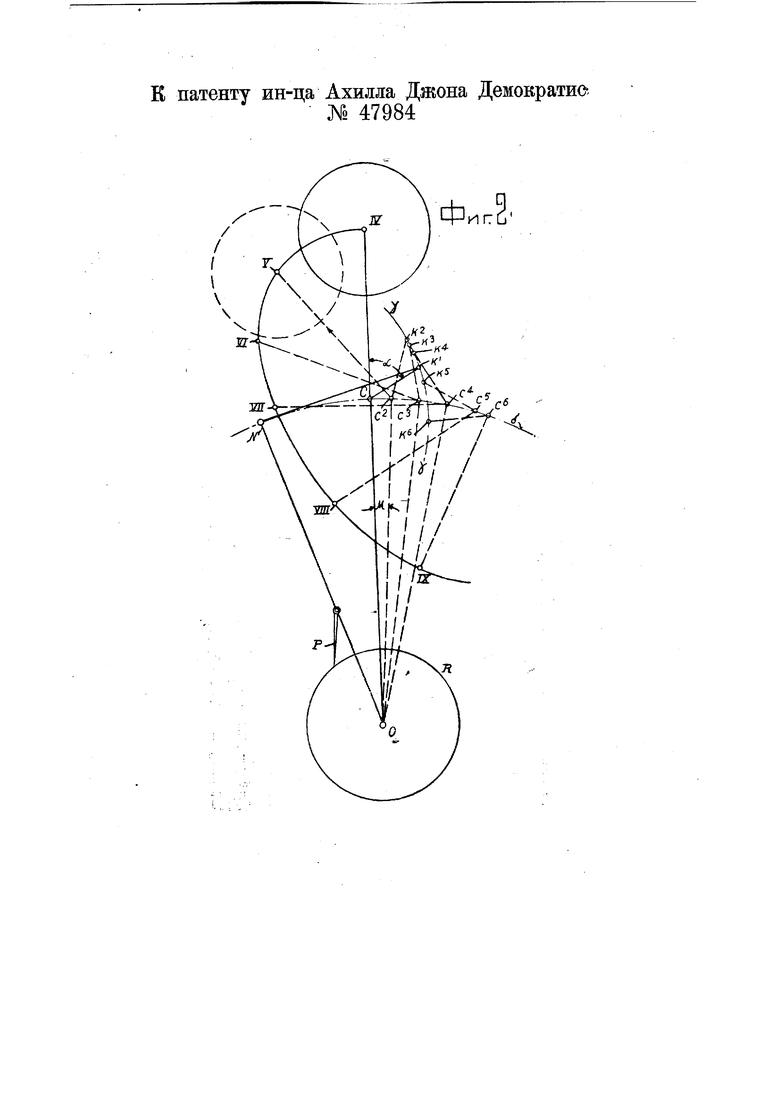
Теперь, когда масса W продолжает вращаться дальше за позицию fV, рычаг NO стремится уйти назад в первоначальное положение, но встречает препятствие со стороны храпового механизма Р, R. Наружный конец N рычага N0 поэтому остается неподвижным в точке (фиг. 2), но так как кривощип С/С находящийся теперь в положении СК, все еще вращается от ведущего органа, точки С к К должны двигаться. Точка К вынуждена двигаться по дуге круга т, имекзщего свой центр в W и радиус, равный длине соединительной тяги KN, между тем как цапфа С вынуждена двигаться по дуге круга 8, имеющего свой центр в О и радиус, равный расстоянию цапфы С от оси вращения ведомого вала, т. е. расстоянию ОС. Допустим, что масса W повернулась из позиции IV на небольшой угол в позицию V, тогда конец К кривошипа по дуге круга перейдет в позицию /, а цапфа С передвинется по дуге S в позицию С. Так получается перемещение цапфы С в позицию С в результате .воздействия рычага, а так как цапфа сидит неподвижно на ведомом органе, то последний поворачивается на некоторый угол jx. Если позиции цапфы С и конца К кривошипа нанести для всех позиций массы W в соответствии с точками IV, V, VI... IX (фиг. 2), то получатся точки C до Сб и К до /С. Проведя плавную кривую через точки V, VI ... IX, представляющую последовательные позиции центра тяжести массы W, получим, что этот центр тяжести описывает циклоидальную кривую. Мгновенный центр вращения массы при переходе ее в позицию IV находится в С, но когда эта масса движется по своему циклоидальному пути, мгновенный центр вращения смещается по направлению показанному на фиг. 3.
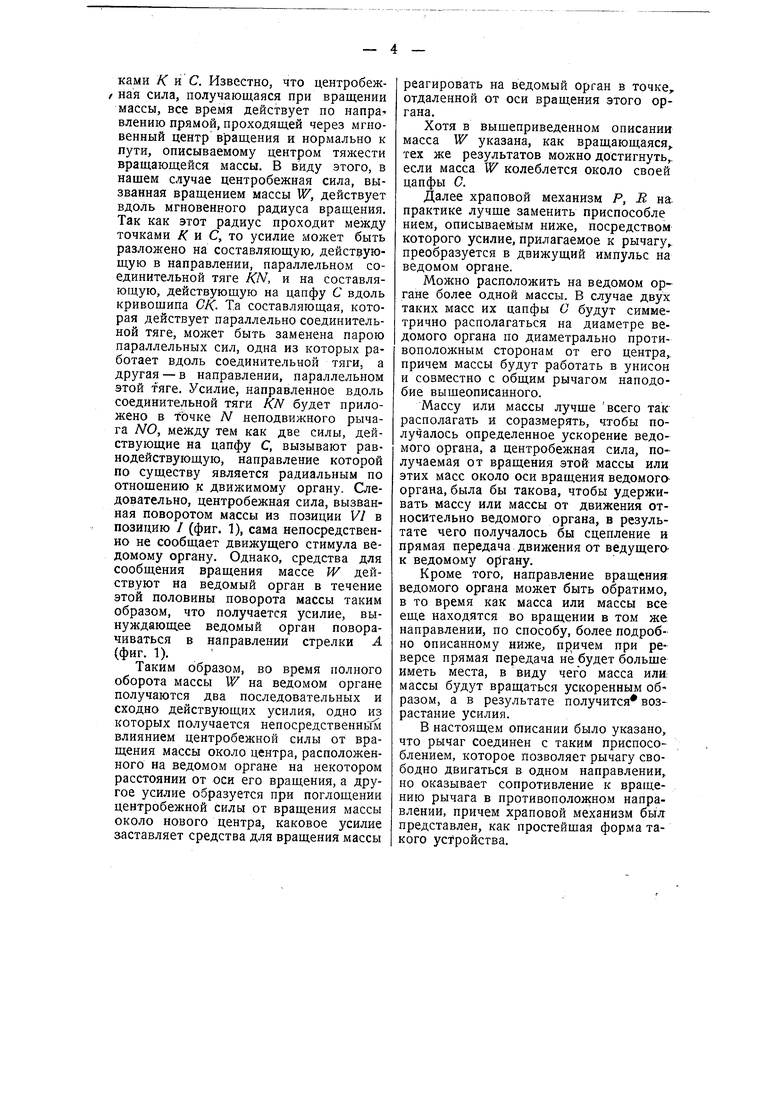
Радиус, соединяющий центр тяжести массы с мгновенным центром вращения, все время проходит между точками К и С. Известно, что центробежная сила, получающаяся при вращении массы, все время действует по направлению прямой, проходящей через мгновенный центр вращения и нормально к пути, описываемому центром тяжести вращающейся массы. В виду этого, в нашем случае центробежная сила, вызванная вращением массы W, действует вдоль мгновенного радиуса вращения. Так как этот радиус проходит между точками К VI С, то усилие может быть разложено на составляющую, действующую в направлении, параллельном соединительной тяге ЛГА/, и на составляющую, действующую на цапфу С вдоль кривощипа СК- Та составляющая, которая действует параллельно соединительной тяге, может быть заменена парою параллельных сил, одна из которых работает вдоль соединительной тяги, а другая - в направлении, параллельном этой тяге. Усилие, направленное вдоль соединительной тяги KN будет приложено в тЪчке N неподвижного рычага , между тем как две силы, действующие на цапфу С, вызывают равнодействующую, направление которой по существу является радиальным по отношению к движимому органу. Следовательно, центробежная сила, вызванная поворотом массы из позиции VI в позицию / (фиг. 1), сама непосредственно не сообщает движущего стимула ведомому органу. Однако, средства для сообщения вращения массе W действуют на ведомый орган в течение этой половины поворота массы таким образом, что получается усилие, вынуждающее ведомый орган поворачиваться в направлении стрелки А (фиг. 1).
Таким образом, во время полного оборота массы W на ведомом органе получаются два последовательных и сходно действующих усилия, одно из которых получается непосредственным влиянием центробежной силы от вращения массы около центра, расположенного на ведомом органе на некотором расстоянии от оси его вращения, а другое усилие образуется при поглощении центробежной силы от вращения массы около нового центра, каковое усилие заставляет средства для вращения массы
реагировать на ведомый орган в точке, отдаленной от оси вращения этого органа.
Хотя в вышеприведенном описании масса W указана, как вращающаяся тех же результатов можно достигнуть если масса W колеблется около своей цапфы С.
Далее храповой механизм Р, R на. практике лучще заменить приспособле нием, описываемым ниже, посредством которого усилие, прилагаемое к рычагу преобразуется в движущий импульс на ведомом органе.
Можно расположить на ведомом органе более одной массы. В случае двух таких масс их цапфы С будут симметрично располагаться на диаметре ведомого органа по диаметрально противоположным сторонам от его центра,, причем массы будут работать в унисон и совместно с общим рычагом наподобие вышеописанного.
Массу или массы лучше всего так располагать и соразмерять, чтобы получалось определенное ускорение ведомого органа, а центробежная сила, получаемая от вращения этой массы или этих масс около оси вращения ведомогооргана, была бы такова, чтобы удерживать массу или массы от движения относительно ведомого органа, в результате чего получалось бы сцепление и прямая передача движения от ведущегок ведомому органу.
Кроме того, направление вращения ведомого органа может быть обратимо, в то время как масса или массы все еще находятся во вращении в том же направлении, по способу, более подробно описанному нижe причем при реверсе прямая передача не будет больше иметь места, в виду чего масса или: массы будут вращаться ускоренным образом, а в результате получится возрастание усилия.
В настоящем описании было указано,, что рычаг соединен с таким приспособлением, которое позволяет рычагу свободно двигаться в одном направлении но оказывает сопротивление к вращению рычага в противоположном направлении, причем храповой механизм был представлен, как простейшая форма такого устройства.
Однако, можно применить другие механизмы для одностороннего движения, и несколько примеров конструкции, пригодной также для реверсивного действия, будут описаны согласно схематическим фиг. 4-6.
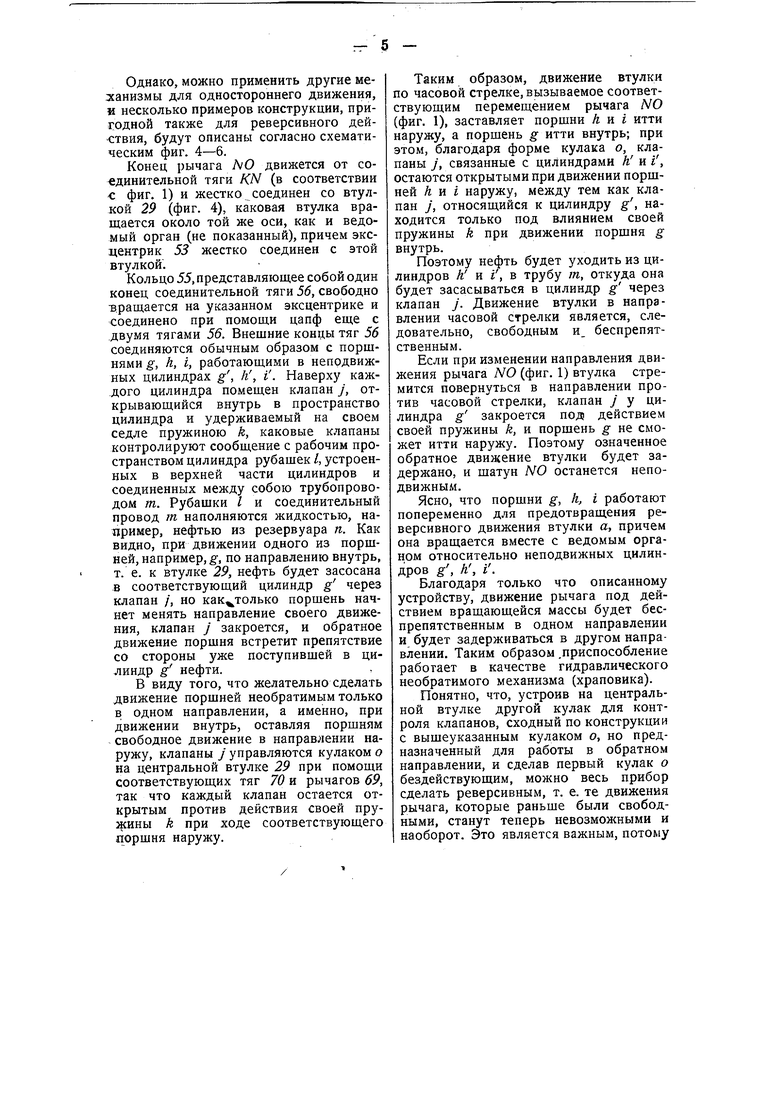
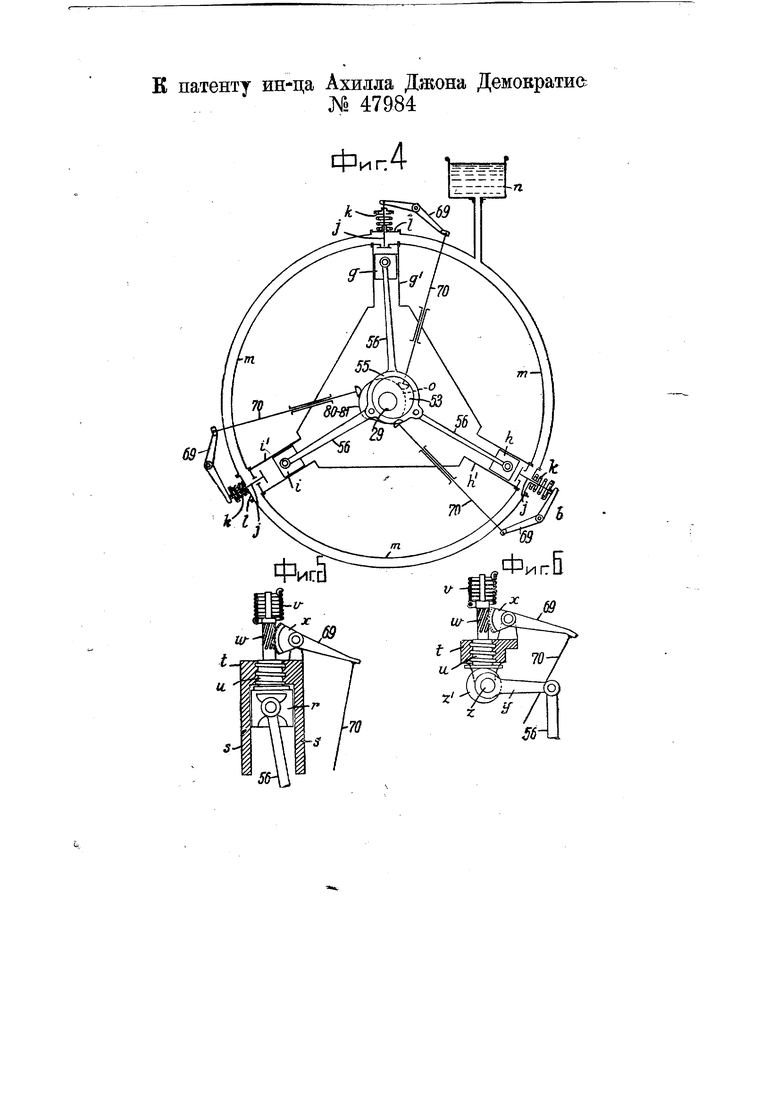
Конец рычага NO движется от соединительной тяги KN (в соответствии с фиг. 1) и жестко соединен со втулкой 29 (фиг. 4), каковая втулка вращается около той же оси, как и ведомый орган (не показанный), причем эксцентрик 53 жестко соединен с этой втулкой.
Кольцо 55, представляющее собой один конец соединительной тяги 56, свободно в.ращается на указанном эксцентрике и соединено при помощи цапф еще с двумя тягами 56. Внешние концы тяг 56 соединяются обычным образом с поршнями g, h, i, работающими в неподвижных цилиндрах g, li, i. Наверху каждого цилиндра помещен клапан у, открывающийся внутрь в пространство цилиндра и удерживаемый на своем седле пружиною k, каковые клапаны контролируют сообщение с рабочим пространством цилиндра рубашек /, устроенных в верхней части цилиндров и соединенных между собою трубопроводом т. Рубашки / и соединительный провод т наполняются жидкостью, например, нефтью из резервуара п. Как видно, при движении одного из поршней, например, g-, по направлению внутрь, т. е. к втулке 29, нефть будет засосана в соответствующий цилиндр g через клапан /, но как только поршень начнет менять направление своего движения, клапан у закроется, и обратное движение поршня встретит препятствие со стороны уже поступившей в цилиндр g нефти.
В виду того, что желательно сделать движение поршней необратимым только в одном направлении, а именно, при движении внутрь, оставляя поршням свободное движение в направлении наружу, клапаны у управляются кулаком о на центральной втулке 29 при помощи соответствующих тяг 70 и рычагов 69, так что каждый клапан остается открытым против действия своей пружины k при ходе соответствующего поршня наружу.
Таким образом, движение втулки по часовой стрелке, вызываемое соответствующим перемещением рычага NO (фиг. 1), заставляет поршни Лиг итти наружу, а поршень g итти внутрь; при этом, благодаря форме кулака о, клапаны J, связанные с цилиндрами h и i, остаются открытыми при движении поршней Лиг наружу, между тем как клапан у, относящийся к цилиндру g, находится только под влиянием своей пружины k при движении порщня g внутрь.
Поэтому нефть будет уходить из цилиндров h и i, в трубу т, откуда она будет засасываться в цилиндр g через клапан у . Движение втулки в направлении часовой стрелки является, следовательно, свободным и беспрепятственным.
Если при изменении направления движения рычага NO (фиг. 1) втулка стремится повернуться в направлении против часовой стрелки, клапан у у цилиндра g закроется под; действием своей пружины k, и поршень g не сможет итти наружу. Поэтому означенное обратное движение втулки будет задержано, и шатун NO останется неподвижным.
Ясно, что поршни g, h, i работают попеременно для предотвращения реверсивного движения втулки а, причем она вращается вместе с ведомым органом относительно неподвижных цилиндров g, h, i,
Благодаря только что описанному устройству, движение рычага под действием вращающейся массы будет беспрепятственным в одном направлении и будет задерживаться в другом направлении. Таким образом.приспособление работает в качестве гидравлического необратимого механизма (храповика).
Понятно, что, устроив на центральной втулке другой кулак для контроля клапанов, сходный по конструкции с вышеуказанным кулаком о, но предназначенный для работы в обратном направлении, и сделав первый кулак о бездействующим, можно весь прибор сделать реверсивным, т. е. те движения рычага, которые раньше были свободными, станут теперь невозможными и наоборот. Это является важным, потому
что такой реверс вызывает изменение направления вращения ведомого органа, а именно, следующим образом. Полуоборот массы W (фиг. 1) из первоначальной позиции / больше не сопровождается свободным движением рычага, который удерживается неподвижным благодаря реверсированного храповика вместо движения в направлении часовой стрелки. Поэтому масса теперь вращается около нового центра и вызывает усилие на цапфе С, которое является причиною для поворачивания ведомого органа в направлении, противоположном стрелке А. Во время последующего полуоборота массы W рычаг является снова свободным в своем движении, и центробежная сила от такого вращения действует на цапфу С, создавая усилие на ведомом органе, снова заставляющее его поворачиваться в направлении, противоположном стрелке А. Можно видеть, что направление вращения ведомого органа при этом реверсировано, между тем как масса W продолжает попрежнему вращаться в направлении против часовой стрелки.
Важным же фактом является то обстоятельство, что если прибор для работы в одном направлении сделать бездействующим, т. е. если движение порщня сделать свободным в любом направлении, оставляя клапаны открытыми при обоих ходах поршня, то рычаг будет свободен для движения в обоих направлениях, следовательно, единственным результатом вращения массы для ведомого органа будет создание двух равных и противоположно направленных усилий, действующих на ведомый орган при каждом полном обороте названной массы. .
В этом случае механизм передачи вращения может быть обозначен „нейтральным, ибо никакого ; вращения ведомому органу не передает.
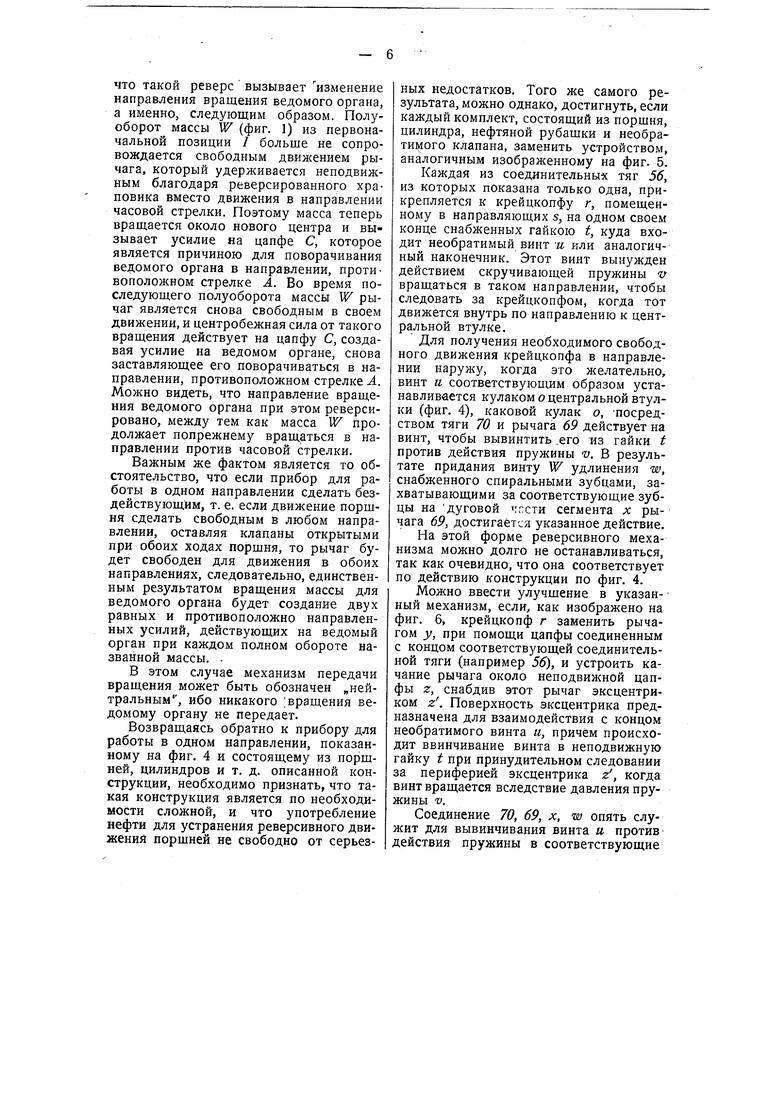
Возвращаясь обратно к прибору для работы в одном направлении, показанному на фиг. 4 и состоящему из поршней, цилиндров и т. д. описанной конструкции, необходимо признать, что такая конструкция является по необходимости сложной, и что употребление нефти для устранения реверсивного движений поршней не свободно от серьезных недостатков. Того же самого результата, можно однако, достигнуть, если каждый комплект, состоящий из поршня, цилиндра, нефтяной рубашки и необрати1 1ого клапана, заменить устройством, аналогичным изображенному на фиг. 5.
Каждая из соединительных тяг 56, из которых показана только одна, прикрепляется к крейцкопфу г, помещенному в направляющих s, на одном своем конце снабженных гайкою t, куда входит необратимый винтК или аналогичный наконечник. Этот винт вынужден действием скручивающей пружины U вращаться в таком направлении, чтобы следовать за крейцкопфом, когда тот движется внутрь по направлению к центральной втулке.
Для получения необходимого свободного движения крейцкопфа в направлении наружу, когда это желательно, винт и соответствующим образом устанавливается кулаком о центральной втулки (фиг. 4), каковой кулак о, посредством тяги 70 и рычага 69 действует на винт, чтобы вывинтить .его из гайки f против действия пружины v. В результате придания винту W удлинения w, снабженного спиральными зубцами, захватывающими за соответствующие зубцы на дуговой чгсти сегмента х рычага 69, достигается указанное действие.
На этой форме реверсивного механизма можно долго не останавливаться, так как очевидно, что она соответствует по действию конструкции по фиг. 4.
Можно ввести улучшение в указанный механизм, если, как изображено на фиг. 6, крейцкопф г заменить рычагом у, при помощи цапфы соединенным с концом соответствующей соединительной тяги (например 56), и устроить качание рычага около неподвижной цапфы Z, снабдив этот рычаг эксцентриком z. Поверхность эксцентрика предназначена для взаимодействия с концом необратимого винта к, причём происходит ввинчивание винта в неподвижную гайку t при принудительном следовании за периферией эксцентрика z, когда винт вращается вследствие давления пружины v,
Соединение 70, 69, х, w опять служит для вывинчивания винта и против действия пружины в соответствующие
моменты, принимая при этом во внимание, что речь идет об очень небольших движениях, и что достаточно небольшой доли полного оборота винта w, чтобы вызвать желательный результат.
Такое устройство представляет собою достаточно эффективный реверсивный храповой механизм, и ясно, что им можно пользоваться для контроля над действием рычага, связанного с вращающейся массою механизма передачи вращения.
Приспособления, описанные выше, на практике обнаруживают тот недостаток, что они все время находятся в работе, даже если не требуется их участия в качестве устройств для работы в одном направлении, как, например, при прямой передаче.
Лучше пользоваться иным приспособлением для регулирования работы рычага, работающим только в те периоды, когда рычаг удерживается в неподвижном положении; каковое приспособление преобразует движение рычага, в импульс, стремящийся помочь вращению ведомого органа.
Такое приспособление состоит из элемента сопротивления, к которому переносится усилие, образованное рычагом при реверсивном вращении, из „реактивного элемента, преобразующего отрицательное или реверсивное вращение элементасопротивления в давление, которое может быть радиальным или параллельным оси прибора, а также из „реверсивного органа, преобразующего это давление в положительное вращение. Это положительное вращение соответствующими приспособлениями передается ведомому органу.
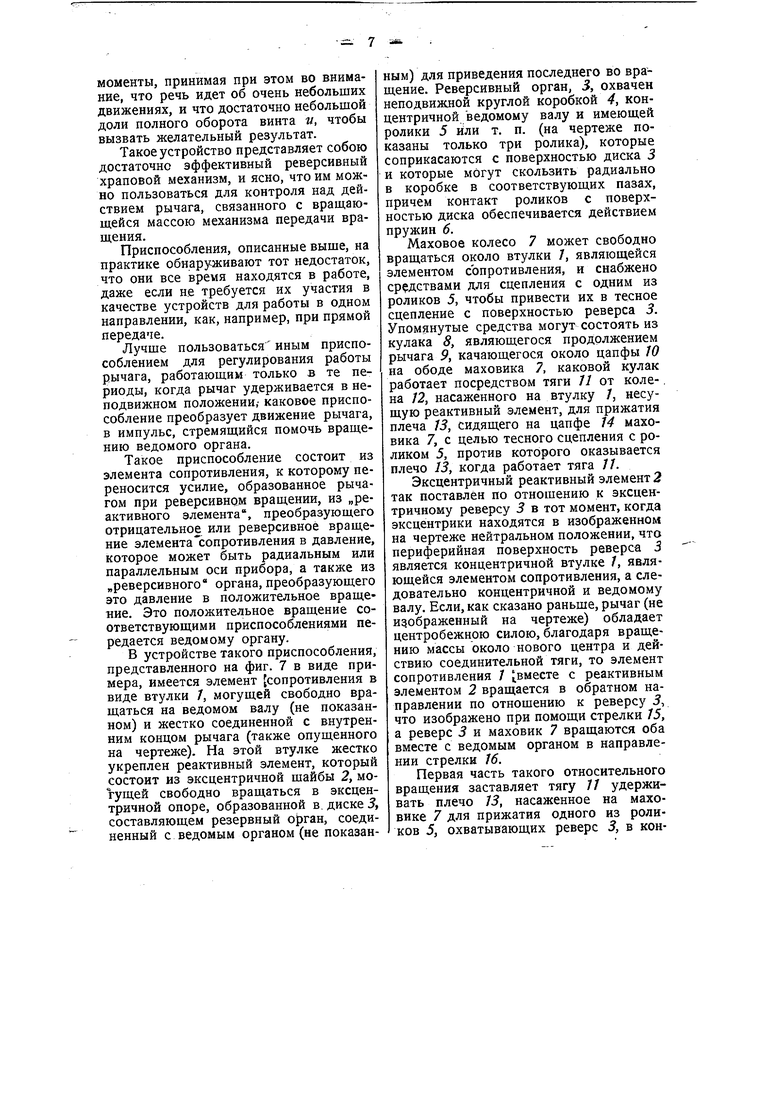
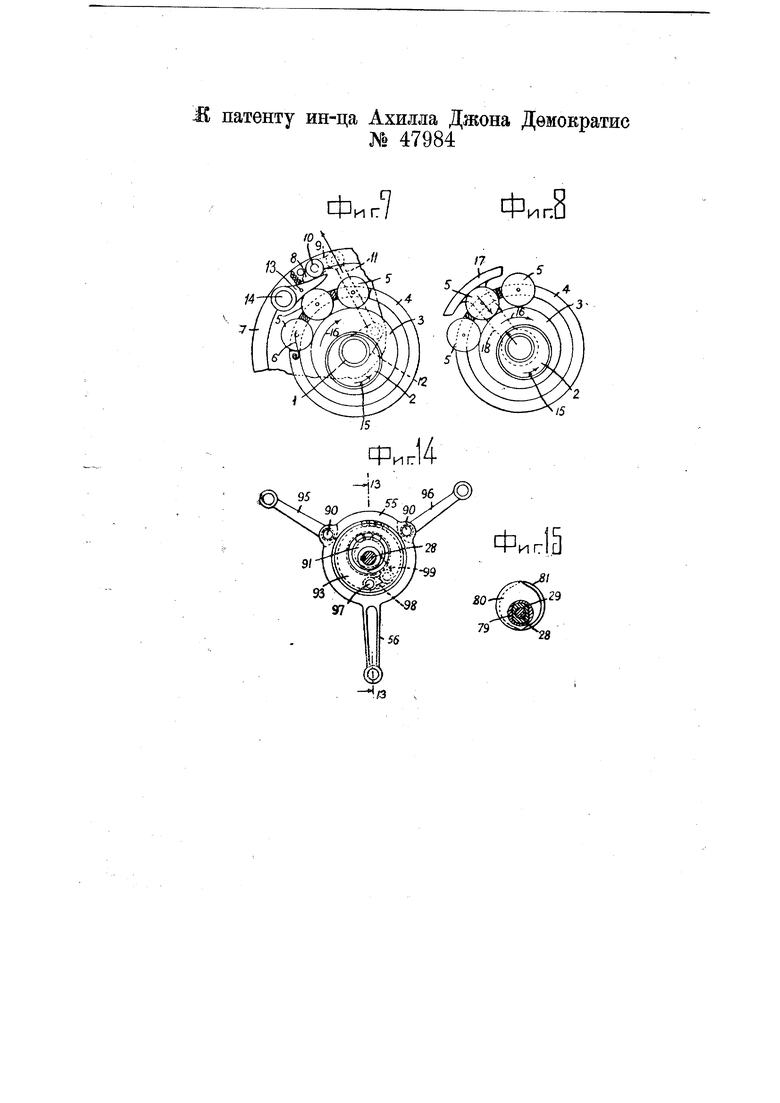
В устройстве такого приспособления, представленного на фиг. 7 в виде примера, имеется элемент сопротивления в виде втулки 7, могущей свободно вращаться на ведомом валу (не показанном) и жестко соединенной с внутренним концом рычага (также опущенного на чертеже). На этой втулке жестко укреплен реактивный элемент, который состоит из эксцентричной щайбы 2, могущей свободно вращаться в эксцентричной опоре, образованной в диске 3, составляющем резервный орган, соединенный с ведомым органом (не показанным) для приведения последнего во вращение. Реверсивный орган, 5, охвачен неподвижной круглой коробкой 4, концентричной ведомому валу и имеющей ролики 5 или т. п. (на чертеже показаны только три ролика), которые соприкасаются с поверхностью диска 3 и которые могут скользить радиально в коробке в соответствующих пазах, причем контакт роликов с поверхностью диска обеспечивается действием пружин 6.
Маховое колесо 7 может свободно вращаться около втулки 7, являющейся элементом сопротивления, и снабжено средствами для сцепления с одним из роликов 5, чтобы привести их в тесное сцепление с поверхностью реверса 3. Упомянутые средства могут состоять из кулака 8, являющегося продолжением рычага 9, качающегося около цапфы JO на ободе маховика 7, каковой кулак работает посредством тяги П от коле-. на 72, насаженного на втулку 7, несущую реактивный элемент, для прижатия плеча 75, сидящего на цапфе J4 маховика 7, с целью тесного сцепления с роликом 5, против которого оказывается плечо 13, когда работает тяга 77.
Эксцентричный реактивный элемент 2 так поставлен по отношению к эксцентричному реверсу 3 в тот момент, когда эксцентрики находятся в изображенном на чертеже нейтральном положении, что периферийная поверхность реверса 3 является концентричной втулке 7, являющейся элементом сопротивления, а следовательно концентричной и ведомому валу. Если, как сказано раньше, рычаг (не изображенный на чертеже) обладает центробежною силою, благодаря вращению массы около нового центра и действию соединительной тяги, то элемент сопротивления 7 вместе с реактивным элементом 2 вращается в обратном направлении по отношению к реверсу 5, что изображено при помощи стрелки 75, а реверс 3 и маховик 7 вращаются оба вместе с ведомым органом в направлении стрелки 76.
Первая часть такого относительного вращения заставляет тягу 77 удерживать плечо 75, насаженное на маховике 7 для прижатия одного из роликов 5, охватывающих реверс 5, в контакте с последним путем воздействия определенного ролика на соответствующую точку реверса.
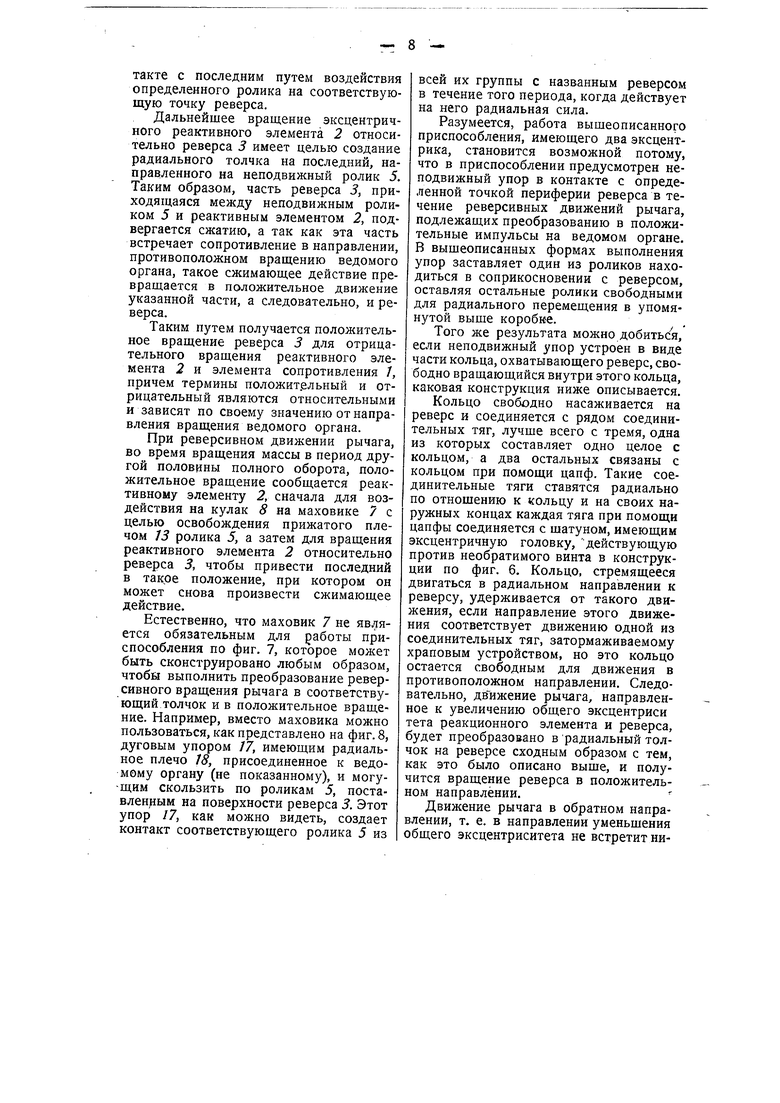
Дальнейшее вращение эксцентричного реактивного элемента 2 относительно реверса 3 имеет целью создание радиального толчка на последний, направленного на неподвижный ролик 5. Таким образом, часть реверса J, приходящаяся между неподвижным роликом 5 и реактивным элементом 2, подвергается сжатию, а так как эта часть встречает сопротивление в направлении, противоположном вращению ведомого органа, такое сжимающее действие превращается в положительное движение указанной части, а следовательно, и реверса.
Таким путем получается положительное вращение реверса 3 для отрицательного вращения реактивного элемента 2 и элемента сопротивления /, причем термины положительный и отрицательный являются относительными и зависят по своему значению от направления вращения ведомого органа.
При реверсивном движении рычага, во время вращения массы в период другой половины полного оборота, положительное вращение сообщается реактивному элементу 2, сначала для воздействия на кулак 8 на маховике 7 с целью освобождения прижатого плечом 13 ролика 5, а затем для вращения реактивного элемента 2 относительно реверса 3, чтобы привести последний в такое положение, при котором он может снова произвести сжимающее действие.
Естественно, что маховик 7 не является обязательным для аботы приспособления по фиг. 7, которое может быть сконструировано любым образом, чтобы выполнить преобразование реверсивного вращения рычага в соответствующий толчок и в положительное вращение. Например, вместо маховика можно пользоваться, как представлено на фиг. 8, дуговым упором 17, имеющим радиальное плечо 18, присоединенное к ведомому органу (не показанному), и могу-щим скользить по роликам 5, поставленрым на поверхности реверса 3. Этот упор /7, как можно видеть, создает контакт соответствующего ролика 5 из
всей их группы с названным реверсом в течение того периода, когда действует на него радиальная сила.
Разумеется, работа вышеописанного приспособления, имеющего два эксцентрика, становится возможной потому, что в приспособлении предусмотрен неподвижный упор в контакте с определенной точкой периферии реверса в течение реверсивных движений рычага, подлежащих преобразованию в положительные импульсы на ведомом органе. В вышеописанных формах выполнения упор заставляет один из роликов находиться в соприкосновении с реверсом, оставляя остальные ролики свободными для радиального перемещения в упомянутой выше коробке.
Того же результата можно добитьсЯ если неподвижный упор устроен в виде части кольца, охватывающего реверс, свободно вращаюш,ийся внутри этого кольца, каковая конструкция ниже описывается.
Кольцо свободно насаживается на реверс и соединяется с рядом соединительных тяг, лучше всего с тремя, одна из которых составляет одно целое с кольцом, а два остальных связаны с кольцом при помощи цапф. Такие соединительные тяги ставятся радиально по отношению к «ольцу и на своих наружных концах каждая тяга при помощи цапфы соединяется с шатуном, имеющим эксцентричную головку, действующую против необратимого винта в конструкции по фиг. 6. Кольцо, стремящееся двигаться в радиальном направлении к реверсу, удерживается от такого движения, если направление этого движения соответствует движению одной из соединительных тяг, затормаживаемому храповым устройством, но это кольцо остается свободным для движения в противоположном направлении. Следовательно, движение рычага, направленное к увеличению общего эксцентриси тета реакционного элемента и реверса, будет преобразовано в радиальный толчок на реверсе сходным образом с тем, как это было описано выше, и получится вращение реверса в положительном направлении.
Движение рычага в обратном направлении, т. е. в направлении уменьшения общего эксцентриситета не встретит никакого сопротивления в виду того, что кольцо будет двигаться в направлении размыкания храпового устройства.
Последнее храповое устройство подобно ранее описанным, может быть реверсировано или приведено в бездействие, чтобы создать необходимые условия для реверсирования направления вращения ведомого органа или соответственно для прекращения вращения последнего.
Комплектный механизм передачи, построенный в соответствии с настоящим изобретением, описывается дальше со ссылками на фиг. 9-12.
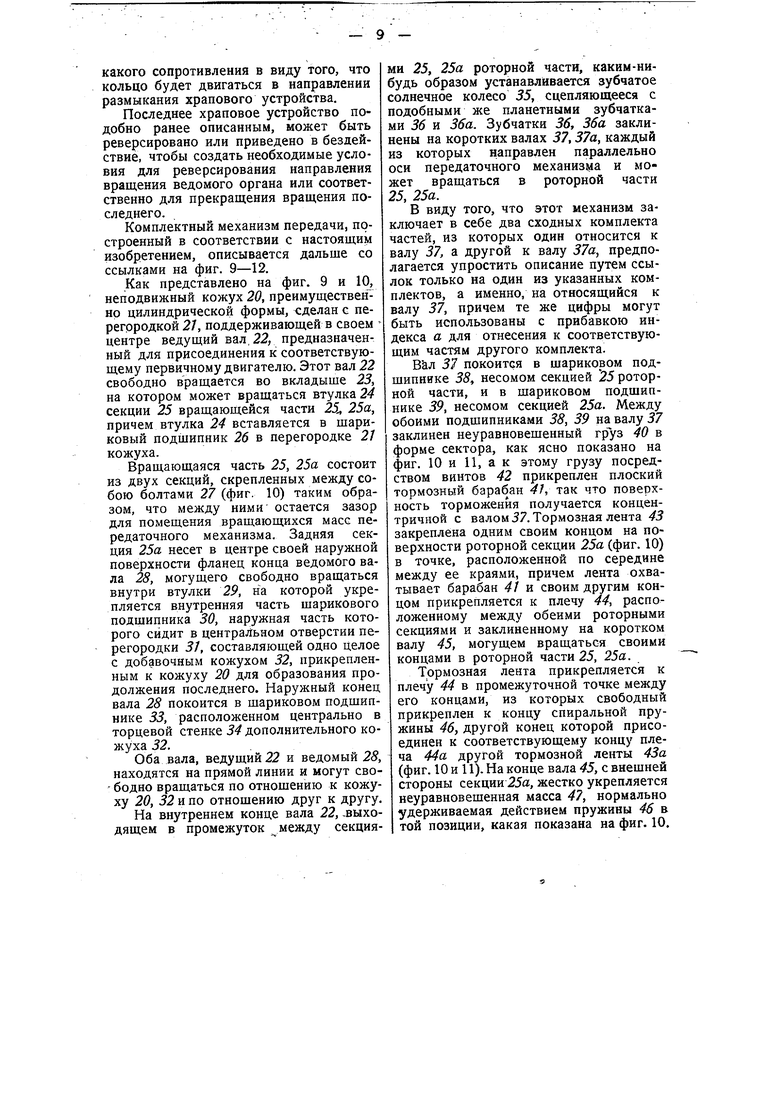
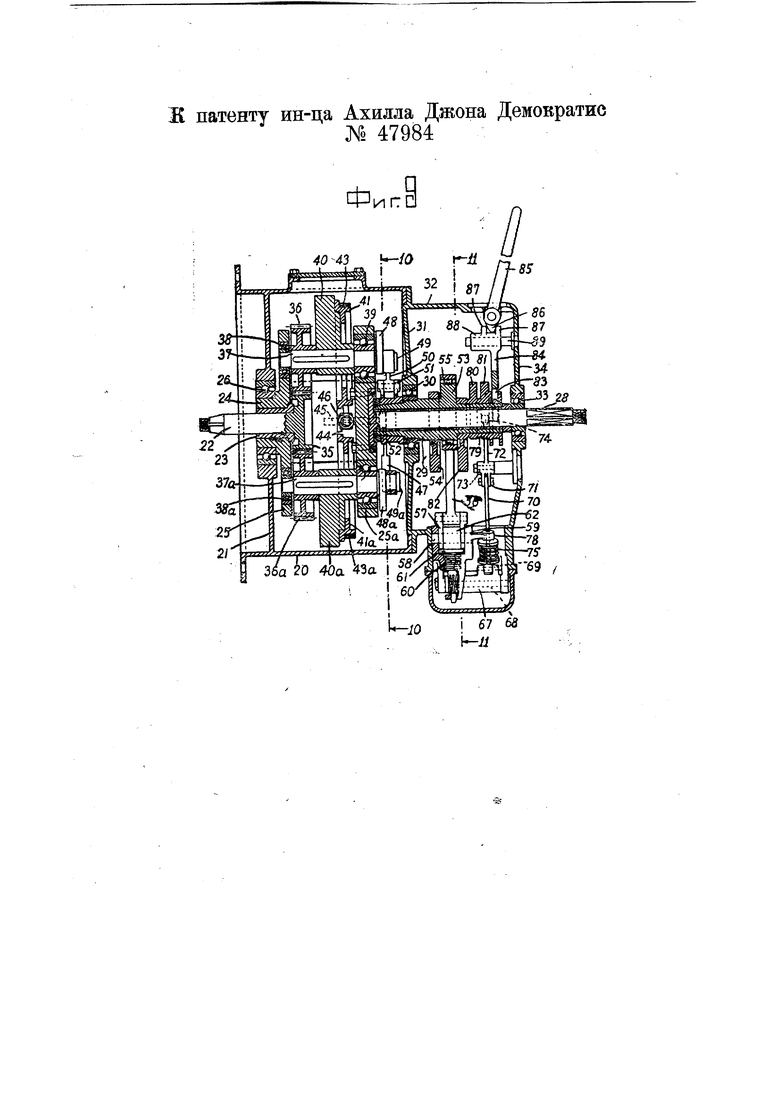
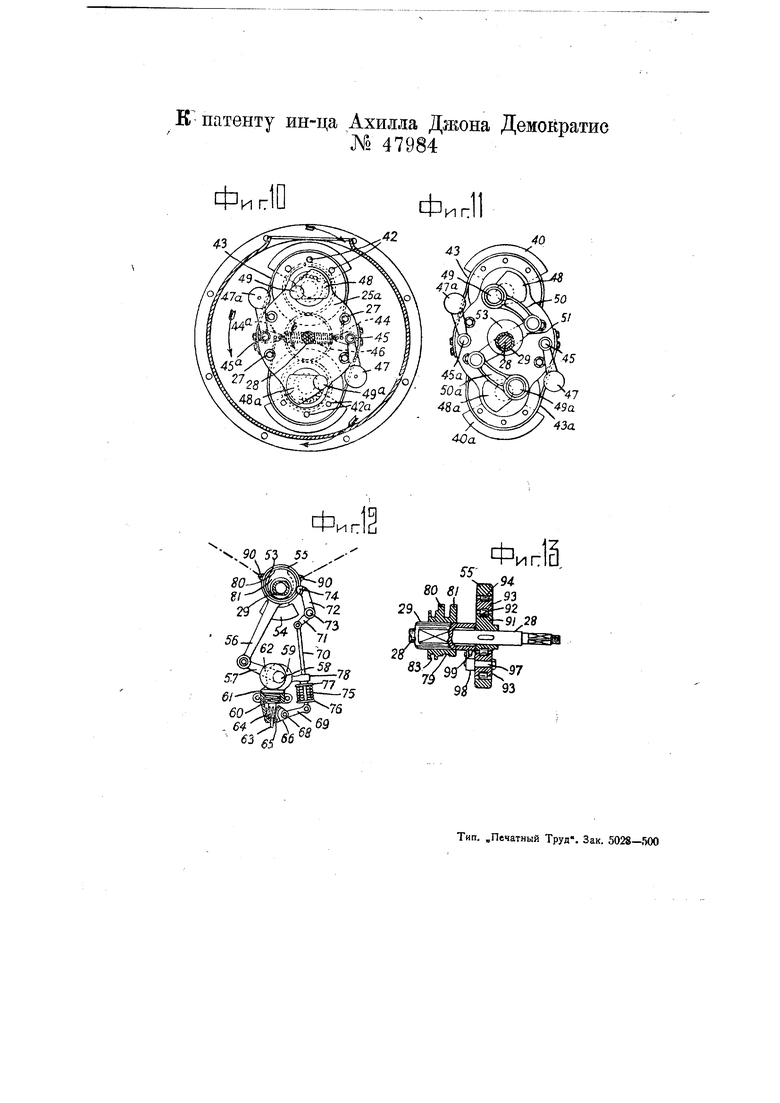
Как представлено на фиг. 9 и 10, неподвижный кожух 20, преимуществен HO цилиндрической формы, сделан с перегородкой 27, поддерживающей в своем центре ведущий вал, 22, предназначенный для присоединения к соответствующему первичному двигателю. Этот вал 22 свободно вращается во вкладыше 23, на котором может вращаться втулка 24 секции 25 вращающейся части 25, 25а, причем втулка 2 вставляется в шариковый ПОДП1ИПНИК 26 в перегородке 27 кожуха.
Вращающаяся часть 25, 25а состоит из двух секций, скрепленных между собою болтами 27 (фиг. 10) таким образом, что между НИМИ остается зазор для помещения вращающихся масс передаточного механизма. Задняя секция 25а несет в центре своей наружной поверхности фланец конца ведомого вала 28, могущего свободно вращаться внутри втулки 29, которой укрепляется внутренняя часть шарикового подшипника 30, наружная часть которого сидит в центральном отверстии перегородки 5/, составляющей одно целое с добавочным кожухом 32, прикрепленным к кожуху 20 для образования продолжения последнего. Наружный конец вала 28 покоится в шариковом подшипнике 33, расположенном центрально в торцевой стенке 34 дополнительного кожуха 32.
Оба вала, ведущий 22 и ведомый 25, находятся на прямой линии и могут свободно вращаться по отношению к кожуху 20, 32 и по отношению друг к другу.
На внутреннем конце вала 22, .выходящем в промежуток между секциями 25, 25а роторной части, каким-нибудь образом устанавливается зубчатое солнечное колесо 55, сцепляющееся с подобными же планетными зубчатками 36 и Зба. Зубчатки 36, Зба заклинены на коротких валах 37,37а, каждый из которых направлен параллельно оси передаточного механизма и может вращаться в роторной части 25, 25а.
В виду того, что этот механизм заключает в себе два сходных комплекта частей, из которых один относится к валу 37, а другой к валу 37а, предполагается упростить описание путем ссылок только на один из указанных комплектов, а именно, на относящийся к валу 37, причем те же цифры могут быть использованы с прибавкою индекса а для отнесения к соответствующим частям другого комплекта.
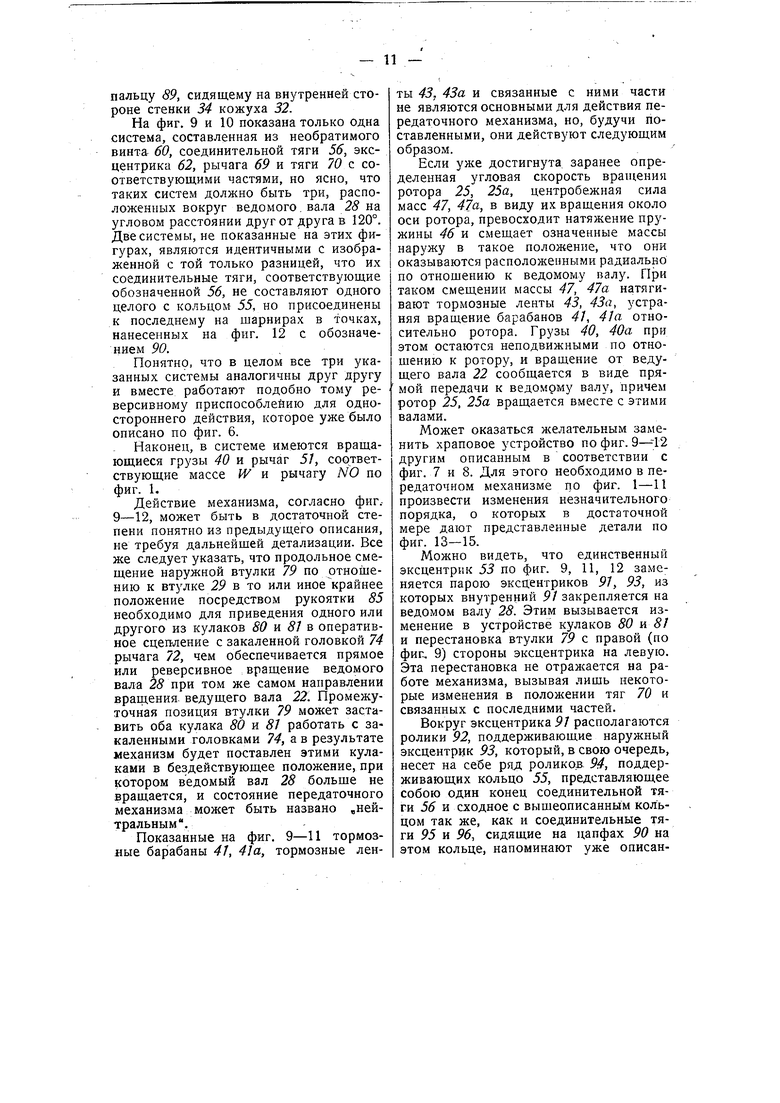
57 покоится в шариковом подшипнйке 55, несомом секцией 5 роторной части, и в шариковом подшипнике 39, несомом секцией 25а. Между обоими подшипниками 38, 39 на валу 57 заклинен неуравновешенный груз 40 в форме сектора, как ясно показано на фиг. 10 и 11, а к этому грузу посредством винтов 42 прикреплен плоский тормозный барабан 4f, так что поверхность торможения получается концентричной с валом57. Тормозная лента 43 закреплена одним своим концом на поверхности роторной секции 25а (фиг. 10) в точке, расположенной по середине между ее краями, причем лента охватывает барабан 7 и своим другим концом прикрепляется к плечу 44, расположенному между обеими роторными секциями и заклиненному на коротком валу 45, могущем вращаться своими концами в роторной части 25, 25а.
Тормозная лента прикрепляется к плечу 44 в промежуточной точке между его концами, из которых свободный прикреплен к концу спиральной пружины 46, другой конец которой присоединен к соответствующему концу плеча 44а другой тормозной ленты 43а (фиг. 10 и 11). На конце вала 45, с внешней стороны секции 25а, жестко укрепляется неуравновешенная масса 47, нормально удерживаемая действием пружины 46 в той позиции, какая показана на фиг. 10.
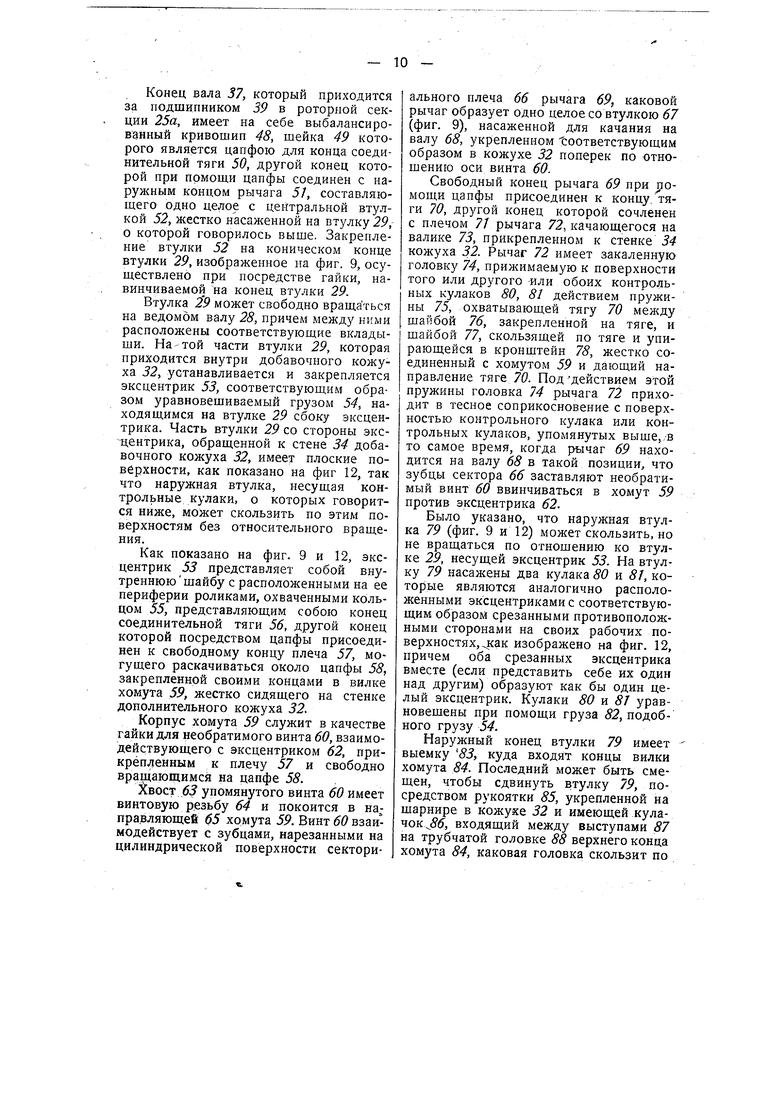
Конец вала 37, который приходится за подшипником 39 в роторпой секции 25а, имеет на себе выбалансированный кривошип 48, шейка 49 которого является цапфою для конца соединительной тяги 50, другой конец которой при помощи цапфы соединен с наружным концом рычага 51, составляющего одно целое с центральной втулкой 52, жестко насаженной на втулку 29, о которой говорилось выше. Закрепление втулки 52 на коническом конце втулки 29, изображенное на фиг. 9, осуществлено при посредстве гайки, навинчиваемой на конец втулки 29.
Втулка 29 может свободно вращаться на ведомом валу 28, причем между ними расположены соответствующие вкладыщи. На-той части втулки 29, которая приходится внутри добавочного кожуха 32, устанавливается и закрепляется эксцентрик 53, соответствующим образом уравновешиваемый грузом 54, находящимся на втулке 29 сбоку эксцентрика. Часть втулки 29 со стороны эксцентрика, обращенной к стене 34 добавочного кожуха 32, имеет плоские поверхности, как показано на фиг 12, так что наружная втулка, несущая контрольные кулаки, о которых говорится ниже, может скользить по этим поверхностям без относительного вращения.
Как показано на фиг. 9 и 12, эксцентрик 55 представляет собой внутреннююшайбу с расположенными на ее периферии роликами, охваченными кольцом 55, представляющим собою конец соединительной тяги 56, другой конец которой посредством цапфы присоединен к свободному концу плеча 57, могущего раскачиваться около цапфы 58, закрепленной своими концами в вилке хомута 59, жестко сидящего на стенке дополнительного кожуха 32.
Корпус хомута 59 служит в качестве гайки для необратимого винта 60, взаимодействующего с эксцентриком 62, прикрепленным к плечу 57 и свободно вра1цаювдимся на цапфе 58.
вост 65 упомянутого винта 60 имеет винтовую р.езьбу 64 и покоится в на; правляющей 65 хомута 59. Винт 60 взаимодействует с зубцами, нарезанными на цилиндрической поверхности секториального плеча 66 рычага 69, каковой рычаг образует оДно целое со втулкою 67 (фиг. 9), насаженной для качания на валу 68, укрепленном Соответствующим образом в кожухе 32 поперек по отношению оси винта 60.
Свободный конец рычага 69 при омощи цапфы присоединен к концу/тяги 70, другой конец которой сочленен с плечом 7/ рычага 72, качающегося на валике 73, прикрепленном к стенке 34 кожуха 52. Рычаг 72 имеет закаленную головку 74, прижимаемую к поверхности того или другого лп обоих контрольных кулаков 80, 81 действием пружины 75, охватывающей тягу 70 между шайбой 76, закрепленной на тяге, и шайбой 77, скользящей по тяге и упирающейся Б кронштейн 78, жестко соединенный с хомутом 59 и дающий направление тяге 76. Поддействием этой пружины головка 74 рычага 72 приходит в тесное соприкосновение с поверхностью контрольного кулака или контрольных кулаков, упомянутых выше, в то самое время, когда рычаг 69 находится на валу 68 в такой позиции, что зубцы сектора 66 заставляют необратимый винт 60 ввинчиваться в хомут 59 против эксцентрика 62.
Было указано, что наружная втулка 79 (фиг. 9 и 12) может скользить, но не вращаться по отношению ко втулке 29, несущей эксцентрик 55. На втулку 79 насажены два кулака 80 и 81, которые являются аналогично расположенными эксцентриками с соответствующим образом срезанными противоположными сторонами на своих рабочих поверхностях, ак изображено на фиг. 12, причем оба срезанных эксцентрика вместе (если представить себе их один над другим) образуют как бы один целый эксцентрик. Кулаки 80 и 8J уравновешены при помощи груза 82, подобного грузу 54.
Наружный конец втулки 79 имеет выемку 83, куда входят концы вилки хомута 84. Последний может быть смешен, чтобы сдвинуть втулку 79, посредством рукоятки 85, укрепленной иа шарнире в кожухе 52 и имеющей кулачок б, входящий между выступами 87 на трубчатой головке 88 верхнего конца хомута 84, каковая головка скользит по
пальцу 89, сидящему на внутренней стороне стенки 34 кожуха 32.
На фиг. 9 и 10 показана только одна система, составленная из необратимого винта 60, соединительной тяги 56, эксцентрика 62, рычага 69 и тяги 70 с соответствующими частями, но ясно, что таких систем должно быть три, расположенных вокруг ведомого.вала 28 на угловом расстоянии друг от друга в 120°. Две системы, не показанные на этих фигурах, являются идентичными с изображенной с той только разницей, что их соединительные тяги, соответствующие обозначенной 56, не составляют одного целого с кольцом 55, но присоединены к последнему на шарнирах в точках, нанесенных на фиг. 12 с обозначением 90.
Понятно, что в целом все три указанных системы аналогичны друг другу и вместе работают подобно тому реверсивному приспособлейию для одностороннего действия, которое уже было описано по фиг. 6.
Наконец, в системе имеются вращающиеся грузы 40 и рычаг 5/, соответствующие массе IV и рычагу ЛО по фиг. 1,
Действие механизма, согласно фиг.9-12, может быть в достаточной степени понятно из предыдущ,его описания, не требуя дальнейшей детализации. Все же следует указать, что продольное смещение наружной втулки 79 по OTHouieнию к втулке 29 в то или иное крайнее положение посредством рукоятки 85 необходимо для приведения одного или другого из кулаков SO к 81 ъ оперативное сцепление с закаленной головкой 74 рычага 72, чем обеспечивается прямое или реверсивное вращение ведомого вала 2 при том же самом направлении вращения, ведущего вала 22. Промежуточная позиция втулки 79 может заставить оба кулака 80 и 81 работать с закаленными головками 74, а в результате механизм будет поставлен этими кулаками в бездействующее положение, при котором ведомый вал 28 больще не вращается, и состояние передаточного механизма может быть названо «нейтральным.
Показанные на фиг. 9-И тормозные барабаны 41, 41а, тормозные ленты 43, 43а и связанные с ними части не являются основными для действия передаточного механизма, но, будучи поставленными, они действуют следующим образом.
Если уж;е достигнута заранее определенная угловая скорость вран1ения ротора 25, 25а, центробежная сила масс 47, 47а, в виду их вращения около оси ротора, превосходит натяжение пружины 46 и смещает означенные массы наружу в такое положение, что они оказываются расположенными радиально по отношению к ведомому валу. При таком смещении массы 47, 47а натягивают тормозные ленты 43, 43а, устраняя вращение барабанов 4J, 4Ja относительно ротора. Грузы 40, 40а при этом остаются неподвижными по отнощению к ротору, и вращение от ведущего вала 22 сообщается в виде прямой передачи к ведомому валу, причем ротор 25, 25а вращается вместе с этими валами.
Может оказаться желательным заменить храповое устройство по фиг. другим описанным в соответствии с фиг. 7 и 8. Для этого необходимо в передаточном механизме по фиг. 1-11 произвести изменения незначительного порядка, о которых в достаточной мере дают представленные детали по фиг. 13-15.
Можно видеть, что единственный эксцентрик 53 по фиг. 9, 11, 12 заменяется парою эксцентриков Р7, 93, из которых внутренний 91 закрепляется на ведомом валу 28. Этим вызывается изменение в устройстве кулаков 80 и 8J и перестановка втулки 79 с правой (по фиг-, 9) стороны эксцентрика на левуЕО. Эта перестановка не отражается на работе механизма, вызывая лищь некоторые изменения в положении тяг 70 и связанных с последними частей.
Вокруг эксцентрика 91 располагаются ролики 92, поддерживающие наружный эксцентрик 93, который, в свою очередь, несет на себе ряд роликов. 94, поддерживающих кольцо 55, представляющее собою один конец соединительной тяги 56 и сходное с вышеописанным кольцом так же, как и соединительные тяги 95 и 96, сидящие на цапфах 90 на этом кольце, напоминают уже описанные соединительные тяги храпового приспособления. Эти соединительные тяги своими свободными концами связаны с необратимыми винтами, как это уже было описано по отношению к фиг. 9-12. Наружный эксцентрик 93 соединяется посредством пальца 97 и соединительной серьги 98 с кривошипом 99, сидящим на наружном конце втулки 29, который жестко соединен с рычагом 51 (фиг. 11).
Фиг. 15 изображает кулаки 80 и , скользящие по втулке 29.
Таким образом, хотя взаиморасполо-, жение эксцентриков, соединенных со втулкою 29 н с ведомым органом 28, обратное по сравнению с фиг. 7 и 8, легко понять, однако, что действие их будет идентичным с таковым при положении эксцентриков по этим фигурам, а именно: реверсивное вращение наружного эксцентрика 93 по отношению к внутреннему эксцентрику Р/ превращается в радиальный толчок для последнего, заставляя его двигаться в прямом направлении.
Общая работа передаточного механизма, измененного в соответствии с фиг. 13 и 14, та же, что и передаточного механизма по фиг. 9-12, но с дополнительным преимуществом, состоящим в том, что рычагу 5/ сообщается определенное реверсивное движение в течение тех периодов, когда он раньше оставался неподвижным, причем это реверсивное движение используется для создания движущего импульса на ведомом валу. Этим устраняется источник возможных толчков, а кроме того, когда передаточный механизм работает на прямую передачу, двойная эксцентриковая система вращается наподобие простого диска, потому что эксцентрики занимают свое нейтральное положение, при котором общий эксцентриситет равен нулю, а следовательно соединительные тяги 56, 95, 96 остаются в течение работы на прямую передачу неподвижными.
Необходимо подчеркнуть, что выщеописанньте конструктивные оформления представляют собою только примеры и что многочисленные иные конструкции могут быть придуманы, не выходя из рамок изобретения.
Предмет изобретения.
1.Передача между коаксиальными валами с автоматическим изменением передаточного отношения, заключающая в себе неуравновещенные грузы, поворотно укрепленные на ведомом валу JB некотором расстоянии от оси передачи и приводимые во вращение от ведущего вала с целью создания силы, действующей на ведомый вал и периодически изменяющейся по направлению с частотой периодов, возрастающей с возрастанием скорости вращения ведущего вала относительно ведомого, с применением стопорного устройства для предотвращения вращения ведомого вала в обратную сторону, когда действующий на ведомый вал момент, создаваемый периодически изменяющейся силой, приобретает отрицательное значение, отличающаяся тем, что стопорные устройства приводятся в действие от ведущего вала посредством сопряженного с ними, свободно насаженного на ведомый вал и сочлененного с цапфами неуравновешенных грузов, промежуточного органа таким образом, что промежуточный орган поворачивается на ведомом валу в сторону вращения последнего, пока , на этот вал действует положительный момент периодически изменяющейся силы, и поворачивается в обратном относительно ведомого вала направлении, образуя неподвижную в пространстве опору, реакция которой трансформирует отрицательный момент периодически изменяющейся силы в положительный момент вращения ведомого вала.
2.Форма выполнения передачи по п. 1, отличающаяся тем, что промежуточный орган осуществлен в виде втулки 29 (фиг. 9).
3.Форма выполнения передачи по пп. 1 и 2, отличающаяся тем, что сочленение цапф неуравновещенных грузов 40 (фиг. 9--11) со втулкой 29 осуществлено посредством укрепленных на цапфах кривошиповl-/, тяг 50 и укрепленных на втулке рычагов 5/.
4.Форма выполнения передачи по пп. 1 и 2, отличающаяся тем, что стопорные устройства сопряжены со втулкой 29 с одной стороны посредством
жестко насаженного на последнюю эксцентрика 53 (фиг. 9, 12), эксцентриковой обоймы 55 с тягами 56 и плеч 57 с эксцентриками 62, и с другой стороны посредством вращающихся вместе со втулкой кулаков 80-8J, поворотных рычагов 72, тяг 70 и поворотных рычагов 69 с зубчатыми секторами 66.
5.Форма выполнения передачи по пп. 1, 4, отличающаяся тем, что стопорное устройство осуществлено в виде самотормозящихся винтов 60 (фиг. 9, 12), допускающих свободное движение тяг 55 лишь в одном направлении, а в другом допускающих это движение лищь периодически в зависимости от взаимодействия рычагов 69 с кулаками 80-81.
6.Форма выполнения передачи по пп. 1 и 2, отличающаяся тем, что стопорные устройства сопряжены со втулкой 29 с одной стороны посредством жестко насаженного на последнюю эксцентрика 53 (фиг. 4) и эксцентриковой обоймы 55 с тягами 56, и с другой стороны посредством вращающихся вместе со втулкой кулаков 80-81, тяг 70 и рычагов 69.
7.Форма выполнения передачи по пп. 1, 6, отличающаяся тем, что стопорное устройство осуществлено в виде цилиндров с порщнями, наполненных жидкостью и сообщающихся между собою через посредство клапанов, которые допускают свободное движение поршней с тягами 56 лишь в одном направлении, а в другом допускают это Движение лишь периодически в зависимости от
взаимодействия .их с кулаками 80-81 через посредство рычагов 69 и тяг 70,
8.Форма выполнения передачи по пп. 1-7, отличающаяся тен, что эксцентрик 55 является наружной обоймой эксцентрика 91 (фиг. 13 и 14), из коих эксцентрик 91 жестко укреплен на ведомом валу 25, а эксцентрик 55 сочленен посредством серьги 98 с кривощииоы 99 втулки 29.
9.Форма выполнения передачи по пп, 1-8, отличающаяся тем, что, в целях реверсирования передачи, кулаки 80-8/ (фиг. 4, 9, 12, 13 и 15) составлены из двух совмещенных своими центрами эксцентриков, направленных своими выступами в противоположные стороны и переставляемых вдоль втулки 29 для разновременного взаимодействия с тягами 70.
10.Форма выполнения передачи по пп. 1-9, отличающаяся тем, что, в целях выключения передачи, кулаки 80-87 устанавливаются в среднем положении для одновременного взаимодействия их с тягами 70.
11.Форма выполнения передачи по пп. 1-10, отличающаяся тем, что для прекращения вращения неуравновещенных грузов на ведомом валу, в целях получения прямой передачи, применены тормоза 41-43 (фиг. 9-11), включаемые против действия пружины 46 при помощи плеч 44, поворотно укрепленных на ведомом валу и поворачиваемых центробежной силой связанных с ними грузов 47.
патенту ин-ца Ахилла Джона Демократис
№ 47984
| название | год | авторы | номер документа |
|---|---|---|---|
| Передача с автоматическим изменением передаточного отношения | 1928 |
|
SU47983A1 |
| Стартер для двигателей внутреннего горения | 1928 |
|
SU44875A1 |
| Передаточный механизм для изменения скорости вращения | 1925 |
|
SU17961A1 |
| Устройство для передачи вращения от одного вала другому с изменяемым передаточным числом | 1932 |
|
SU34451A1 |
| Устройство для сварки трением | 1989 |
|
SU1829990A3 |
| МАШИНА НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ЗАКУПОРИВАНИЯ ЦИЛИНДРИЧЕСКИХ БАНОК ИЗ ЛИСТОВОГО МЕТАЛЛА | 1930 |
|
SU46834A1 |
| Автоматическая вязальная машина | 1928 |
|
SU38243A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ ЩИТОВ ИЗ КАМЫША ИЛИ СОЛОМЫ | 1930 |
|
SU21436A1 |
| Реверсивная зубчатая передача | 1931 |
|
SU36745A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |
к патенту ин-ца Ахилла Джона Демократие
№ 47984
Фи1г2
г
Е патенту ин-ца Ахилла Джона Демократис
.-г
№ 47984
Фиг
к патенту ин-ца Ахилла Джона Демовратис:
№ 47984
fi
в патенту ин-ца Ахилла Дшона Демократис
Фиг
№ 47984
Фип(
17
Е патенту ин-ца Ахилла Джона Демократис
Ко 47984
Фиг
к патенту ин-ца Ахилла Джона Демократис
ФигЮ
43
63
№ 47984
40