Настоящее изобретение относится к передачам с автоматическим изменением передаточного отношения. Известны уже такого рода передачи, заключающие в себе систему планетных колес, снабженных эксцентрично расположенными грузами и поддерживаемых поворотной около общей оси передачи коробкой.
Предметом изобретения является автоматическое включение прямой передачи при достижении синхронного вращения ведущего и ведомого валов. Коробка, несущая на себе сателлиты и могущая вращаться около общей геометрической оси передачи, удерживается от этого вращения при помощи стопорных орга нов до тех пор, пока не происходит изменения соотношения между числами оборотов обоих валов в сторону синхронизма. Пока коробка застопорена против вращения, передача движения происходит при помощи планетных шестерен, дающих определенное соотношение скоростей, а когда при изменении скоростей ведущий и ведомый валы получают одинаковое число оборотов, передача движения производится соединением валов на прямую, причем коробка увлекается планетными колесами во вращение по направлению вращения главных валов, составляя с последними одну общую- единицу, вращающуюся рокруг 9ДНОЙ общей OQH(
Согласно изобретению могут быть также применены агрегаты, заключающие в себе две системы передач, последовательно сопряженные и служащие для передачи движения от ведущего вала к ведомому, обеспечивая осуществление большего числа ступеней изменения скорости. Изобретение может быть видоизменено таким образом, что планетные колеса будут помещены в органе, жестко укрепленном на ведущем валу, а солнечное колесо, связанное раньше с ведущим валом, будет поворачиваться относительно этого вала и застопориваться или затормаживаться вместо коробки.
Кроме того, согласно изобретению, планетарный механизм может быть соединен с ведущим валом при помощи муфты сцепления для того, чтобы сделать возможным выключение и включение мотора или другого источника силы или облегчить пуск его в ход.
Перечисленные выше и остальные отличительные признаки изобретения иллюстрируются приложенными чертежами, на которых в качестве примера показаны некоторые формы выполнения изобретения.
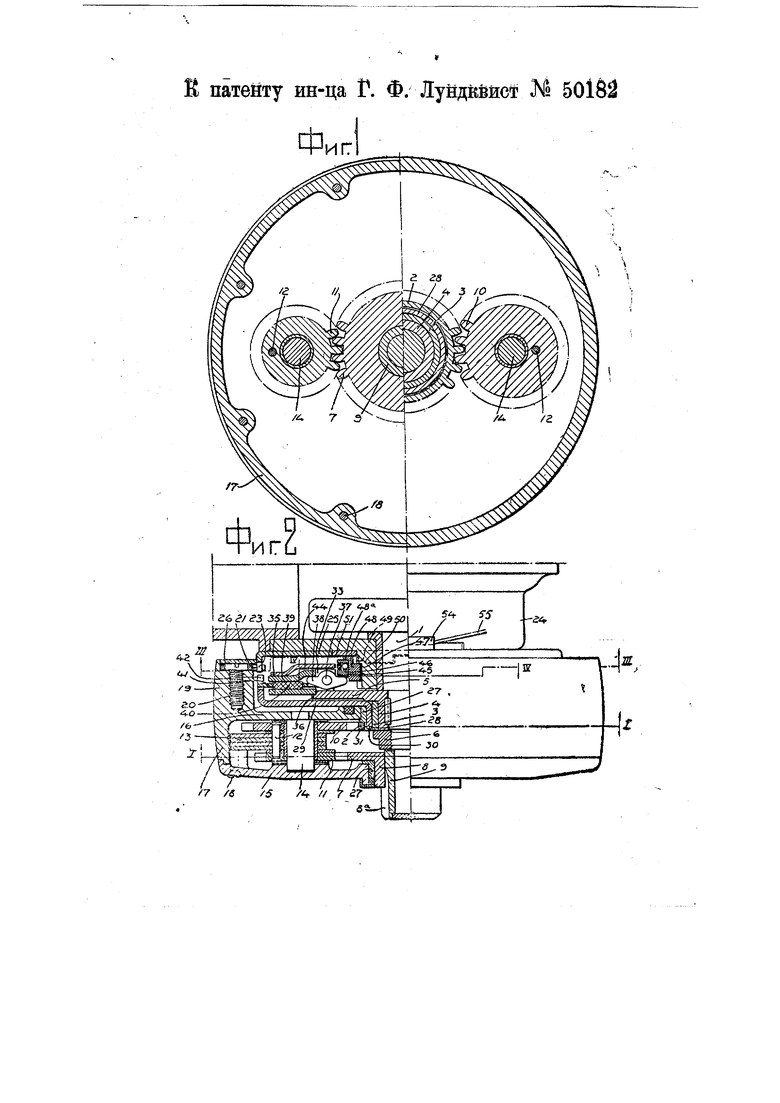
На чертеже фиг. 1 и 2 изображают один из примеров выполнения, причем фиг. 1 изображает разрез передачи по линии /-/ фиг. 2, а фиг. 2 изображает боковой вид и астичный разрез той ж
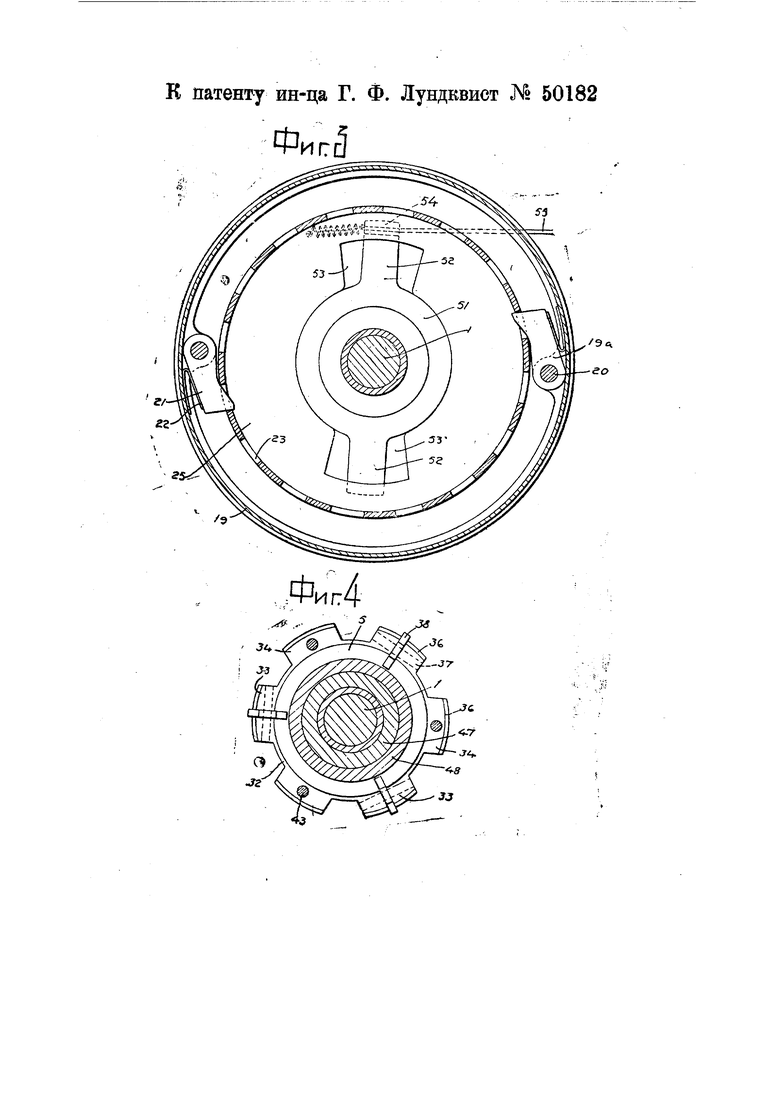
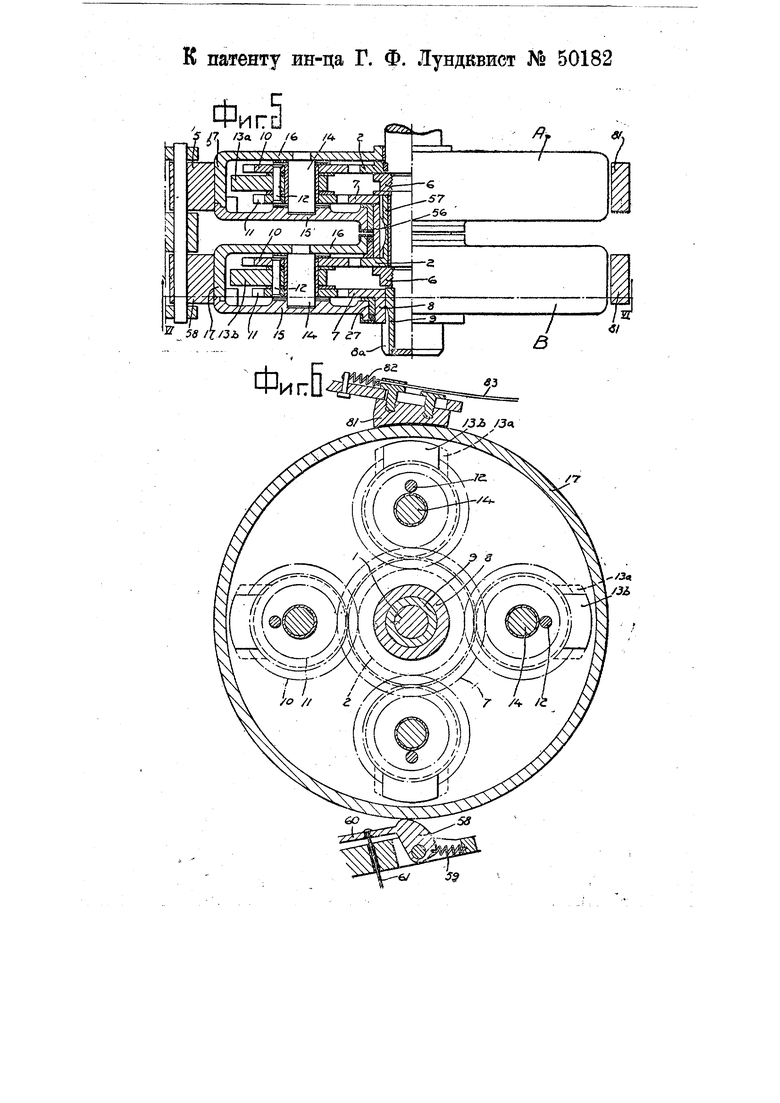
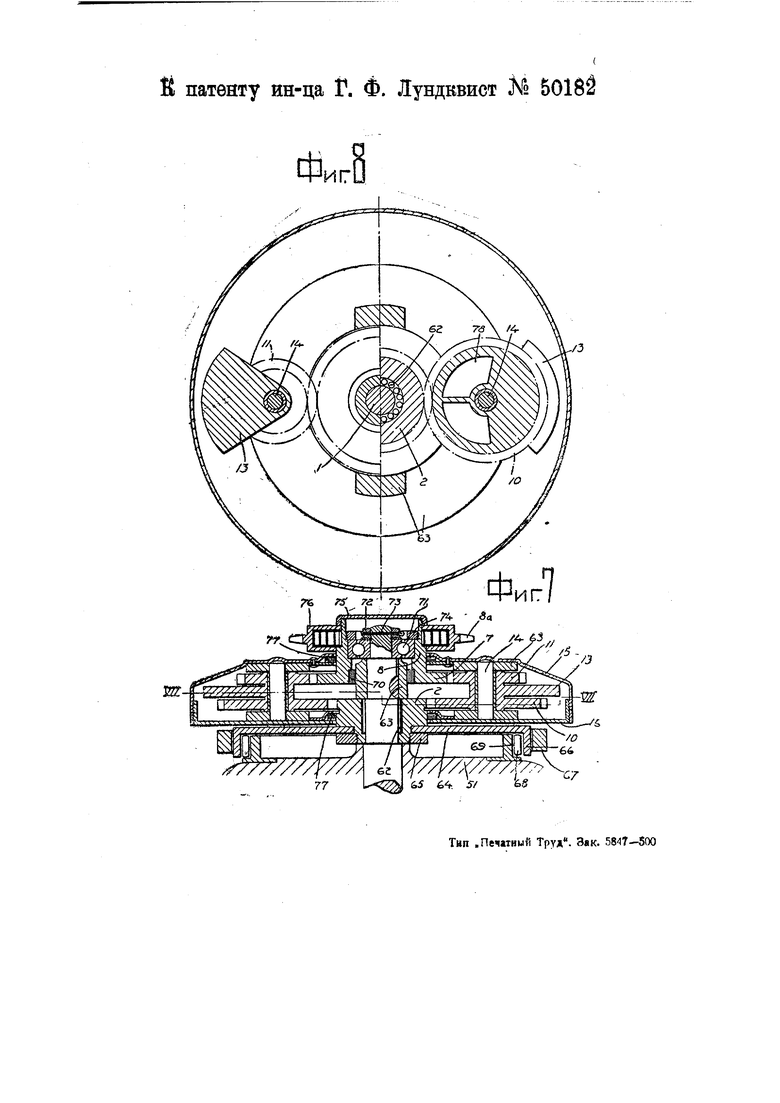
передачи вместе с соответствующим механизмом свободного хода, помещенным на моторной повозке между мотором и ведомым валом; фиг. 3-разрез передачи по линии ///-/// фиг. 2; фиг. 4-разрез по линии /V-/К фиг. 2; фиг. 5-боковой вид и частичный разрез агрегата из двух передач приблизительно такого же устройства, как по фиг, 1, но без механизма свободного хода; фиг. б- разрез по линии VI-У/ фиг. 5; фиг. 7- осевой разрез видоизмененной конструкции; фиг. 8-разрез по линии К//-VII фиг. 7.
В устройстве по фиг. 1-4, где планетарная система имеет две ступени скоростей, а также применено приспособление свободного хода, втулка 3 ведущей солнечной шестерни 2 может вращаться на втулке 4 описанного ниже диска 5, входящего в состав муфты сцепления, причем втулка 4 заклинена или другим способом закреплена наведущем валу /. Навинченная на вал закрепительная гайка 6 удерживает названные части на своих местах. Втулка 8 ведомого солнечного колеса 7 закреплена на втулке 9, надетой на конец вала /, имеющий уменьшенный диаметр или представляющий собою цапфу. Втулка 8 может представлять собою ведомый вал или же может быть соединена с таковым. Например, ее можно снабдить цепным колесом 8(1 для цепи, передающей движение ведомому валу, или же самая втулка может быть выполнена в виде цепного колеса. Если ведущий и ведомый валы расположены на одной оси, то передача от втулки 8 или 9 может осуществляться при помощи соединительного фланца и тому подобного органа. С солнечными колесами 2 и 7 сцеплены планетные колеса JO, 11 двух групп планетных колес (можно применить и больше таких групп), причем эти колеса, из коих колесо 10 каждой группы больше колеса 11, скреплены при помощи одного или нескольких болтов 12 друг с другом и со вставленным между ними эксцентричным телом 13, составленным из нескольких пластин. Каждая составленная таким образом группа планетных колес может вращаться вокруг цапфы 14, укрепленной в передаточной коробке 16. Коробка 16 закл1очает в себе направленный в наружную сторону фланец 77, на который надевается крышка 75, прикрепляемая винтами 18, ввинченными в приливы фланца 77, или прикрепляемая другим способом. Кроме того коробка 16 заключает в себе направленный во внутреннюю сторону фланец 19, окружающий муфту сцепления, причем в приливы 19а. этого фланца ввинчены две диаметрально противоположные цапфы 20 с поворотно насаженными на них стопорными собачками 27 с достаточно тяжелыми свободными концами, каковые собачки прижимаются слабыми пружинами 22 к одному из зубцов 23 закрепленного на моторном кожухе 24 стопорного зубчатого венца 25. Собачки 2/ препятствуют коробке 16 поворачиваться влево, но позволяют ей поворачиваться в противоположном направлении. При вращении коробки вправо собачки отбрасываются центробежной силой таким образом, что не скользят по зубчатому венцу, а постепенно приближаются к стенке коробки, преодолевая давление пружин 22. Число собачек можно варьировать. Во фланец 19 ввинчена крышка 26, перекрывающая промежуток между этим фланцем и зубчатым венцом.
Коробка вращается на втулках 27, надетых на втулку 8 колеса 7 н на фланец 28 диска 29, захватывающего муфту сцепления. Фланец 28 при помощи выступов 30 захватывает выемки 57 колеса 2, так что диск 29 является связанным с этим колесом.
Эксцентричные тела 75 служат в качестве неуравновешенных грузов, назначение которых объяснено ниже. В некоторых случаях эти тела могут быть выполнены в виде одного цельного куска с планетными колесами, снабженными одной общей втулкой. В таком случае пластины, образующие тела 75, могут даже совсем отсутствовать, причем каждая данная группа планетных колес будет действовать непосредственно как неуравновешенный груз.
Упомянутый выше, входящий в состав муфты сцепления, диск 5 снабжен направленным назад направляющим и опорным фланцем 52 (фиг. 4), имеющим на своей окружности несколько (в изображенном примере щесть) симметричнр
расПблбя енйых радиальных выступов 33 и 34, которые попеременно имеют несколько разную конструкцию. На фланец 32 надвинут диск 35, который удерживается от аксиального смещения в наружную сторону при помощи фланцев 36, имеющихся на выступах 33, 34. На каждом из выступов 33 имеется двуплечий качающийся рычаг 38, поворачивающийся на цапфе 37 и прилегающий своим наружным (считая от ведущего вала) концом ко второму сцепному диску 39, подвижно расположенному на задней части фланца диска 5. Между дисками 35 и 39 свободно лежит приводной диск 40, который при помощи выступов 41, имеющихся на периферии этого диска, сцепляется с обращенным внутрь зубчатым венцом 42 диска 29, причем на наружной части диска 40 укреплена корковая или другая набивка с большим коэфициентом трения. На трех остальных выступах 34 закреплен болтами 43 (фиг. 4), снабженный прорезами пружинящий диск 44, лобовая часть которого прилегает к сцепному диску 39. Внуренний конец каждого качающегося рычага 38 лежит в выемке 45 кольца 46 и испытывает действие этого кольца которое может поворачиваться при помощи шарикового подпятника на втором кольце 48. Последнее насажено на выступающую часть 47 кожуха мотора, причем не может поворачиваться, но может скользить по части 47 vi снабжено внутренним фланцем 48а, захватывающим кольцо 46, и имеет на своей внутренней поверхности косые зубцы 49. Кольцо 48 может передвигаться аксиально под действием служащего для управления муфтой сцепления кольцевого диска 51, снабженного соответствующими косыми зубцами 50 и могущего в некоторых ограниченных пределах поворачиваться на в 1щеназванной выступающей части кожуха мотора. Диск 51 (фиг. 3) снабжен плечами 52, входящими в выемки 53 стопорного диска 25, каковые выемки позволяют диску 5/ совершать ограниченные повороты, необходимые для приведения в движение кольца 48. Одно из плеч 5Z оттягивается пружиной и снабжено за крепом 54 для присоединения управляющего каната, Боуденовского троса и т. п.
Когда управляющий диск 51 на содится в нерабочем положении, как показано на фиг. 2, и сцепной диск 39 под действием пружинящего диска 44 фрикционно сцеплен с приводным диском 40, который в свою очередь сцеплен с диском 35, происходит сцепление между ведущим валом / и ведомой втулкой 8, через солнечное колесо 2, диск 29, приводный диск 40у сцепной диск 55 и захватывающий диск 5. Для получения свободного хода управляющий диск 57 поворачивается вправо, чтобы его косые зубцы заставили сдвинуться аксиально кольцо 48, а вместе с ним и кольцо 46, благодаря чему качающийся рычаг 38 повернется таким образом, что его наружный конец заставит диск 39 расцепиться с приводным диском 40.
Описанная муфта сцепления указана лишь в качестве примера и может быть видоизменяема в зависимости от обстоятельств.
Передача действует следующим образом. После пуска мотора и включения сцепления вал / вращается вправо и валы 14 планетных колес ст| емятся вращать коробку 16 в том направлении, Б котором ей мешают поворачиваться захватывающие зубчатый венец 25 собачки 2/J т. е. влево (фиг. 3). В виду того, что коробка задержана, движение вала / передается через группы планетных колес втулке 8 (и ведомому валу) Благодаря определенному передаточному числу планетарного зацепления втулка 8 будет делать меньшее число оборотов, чем вал / осуществляя редукционную передачу.
На этой передаточной ступени мотор сообщает повозке ускорение до некоторой определенной скорости. Прямое соединение моторного вала с ведомым валом может быть осуществлено лищь путем повышения числа оборотов ведомого вала относительно числа оборотов моторного вала в том отношении, которое соответствует передаточному числу или же путем понижения скорости ведущего вала соответственно скорости ведимого вала через посредство мгновенного дросселирования или закрывания газа или же через посредство выключения мотора. В последнем случае благодаря уменьшившейся скорости ведущего вала
йоЛесб / каждой группы тоже начнет вращаться медленно. Но так как мы предполагаем, что число оборотов ведомого вала остается постоянным, то благодаря действию колеса 7 коробка с планетными колесами начнет увлекаться в направлении вращения ведущего в&ла. Так как при этом группы планетных колес 10, 11 начнут поворачиваться вокруг оси коробки для того, чтобы компенсировать уменьшение скорости. Это движение коробки вправо монсет происходить без помехи со стороны собачек 21, так как таковые отбрасываются наружу. Названное движение ускоряется до тех пор, пока скорость коробки не станет равна скорости ведущего вала, а следовательно и скорости ведомого вала. Тем временем скорость вращения планетных колес вокруг их собственных осей постепенно уменьшается и, наконец, при указанном выше конечном положении вращение их совершенно прекращается, В этом положении планетные колеса, когда их грузы повернуты наружу и развиваемся большая центробежная сила благодаря скорости вращения всей системы, непосредственно соединяют ведущий вал с ведомым, так что: вся система вращается, как одна целая единица. При этом могут, конечно, происходить небольшие моментальные качательные или колебательные движения планетных колес вокруг их валов. Если теперь впуск газа в мотор увеличивается или возобновляется или включается мотор, то повозка будет двигаться на прямой передаче вращения от мотора ведомому валу. Необходимым условием для вышеописанного процесса является достаточно большая величина центробежного момента, которая в состоянии преодолеть тот вращающий момент, который получают планетные колеса от ведущего вала. Иначе говоря, центробежные грузы должны быть так рассчитаны, чтобы их центробежный момент равнялся или был iбольше упомянутого вращающего момента при данном числе оборотов.
Как уже упоминалось выше, переход на прямую передачу может также осуг ществляться, если скорость ведомого вала, а следовательно и втулки 8 будет
повыщена по дтношейи1д k ckdpddrH вала 7: Повышение скорости, которое при этом втулка 8 тремится сообщить планетному колесу 11, но которое не может быть передано колесом 10 ко лесу 2 и валу /, вызывает и в этом случае как бы компенсирующее движение планетных колес; последние будут, как описано выШё, принужДеНы сйвершать катящееся движение вокруг оси коробки, увлекая за собою самую коробку, В остальном процесс происходит, как описано выше.
Если во время работы на прямой передаче мотор получит перегрузку и ведомый вал вместе со втулкой 5 начнет уменьшать свою скорость (благодаря увеличению сопротивления), то число оборотов мотора упадет. Когда его скорость понизится настолько, что вращающий момент центробежной силы станет меньше вращающего момента, даваемого моторным валом, то группы планетных колес начнут вращаться; они, так сказать, не смогут более удерживаться неподвижными относительно своих валов. Благодаря этому мотор разгрузится и увеличит свою скорость, тогда как вращение коробки передач будет постепенно уменьшаться, пока, наконец, мотор не разовьет надлежащее число оборотов, необходимое для работы редукционной передачи. Тогда вращение коробки прекратится и коробка будет задержана собачками 21, которые теперь повернутся внутрь, захватят., зубцы венца 25 и будут препятствовать вращению коробки влево. Таким образом, переход от прямого соединения валов к редукционной передаче (передаче посредством планетных колес) может происходить вполне синхронно без помощи муфты сцепления.
Итак, согласно изобретению, переход от работы с редукционной передачей к работе с прямой передачей осуществляется в общем тем, что путем изменений передаточного числа достигается соответствие чисел оборотов между обоими валами, а это может быть осуществлено или понижением числа оборотов ведущего вала или повыше-, нием этого числа у ведомого вала. Наоборот, переход к редукционной передаче от прямой происходит путем увеличения сопротивления или же посредством уменьшения скорости ведомого вала или увеличения скорости ведущего вала до тех пор, пока не установится надлежащее соотнощение между чис лами оборотов обоих валов. Все эти переходы совершаются плавно и автоматически.
Применение муфты сцепления может быть пояснено на примере, когда описанная передача установлена на так называемом легковесном мотоцикле. При помощи троса 55 муфта расцепляется, так что моторный вал получает свободный ход. Когда человек садится на мотоцикл и пускает его педалью в ход, то ведомое колесо 7 коробки начинает вращаться, в каковом вращении после преодоления инерции массы примет участие вся коробка передачи вместе с теми частями механизма свободного сцепления, которые соединены с шестерней 2. Если теперь, после того, как мотоцикл или коробка достигнет определенной скорости, включить вал мотора, то получится затормаживание скорости шестерни 2, но в то же время сила реакции заставит ускориться вращение коробки вправо до достижения такой скорости, отношение которой к скорости шестерни 7 определяется передаточным числом внутри коробки. Ясно, что ускоряющая сила равняется сопротивлению пуска мотора и будет иметь максимальное значение во время первого оборота мотора. По мере того, как пущенный в ход мотор ускоряет свое движение под действием собственной силы, в той же степени замедляется вращение коробки передач, пока коробка, вал мотЬра и колесо 7 не получат одинаковую скорость, благодаря чему произойдет прямое соединение валов. Если в это время (как объяснялось выше) центробежный момент грузов станет равным или превзойдет момент вращения мотора, то мотор будет продолжать и дальше работать на прямом соединении валов. В противном случае движение мотора будет продолжать ускоряться, а вращение коробки передач-замедляться, пока скорость вращения коробки не станет равной нулю. Ее стремление получить движение §лево встретит препятствие CQ стороны
собачек 21, и мотор будет работать на редукционной передаче как было объяснено выше.
Если же во время езды желательно перейти от прямого соединения валов на редукционную передачу не автоматически, а произвольно, то это достигается тем, что вал мотора моментально переводят на свободный ход, причем живая сила при повышении числа оборотов прибавится к вращающему моменту мотора и благодаря этому будет преодолен центробежный момент вращающихся грузов.
Следует отметить, что аксиальные силы, действующие на механизм свободного хода при пуске мотоцикла, например, перед включением мотора, приложены исключительно к неподвижным частям, так что сопротивление на трение сводится к минимуму.
На фиг. 5 и 6 показано применение изобретения к агрегату, не имеющему муфты сцепления и состоящему из двух передаточных коробок А к В, каждая из которых имеет почти такую же конструкцию, как и коробка по фиг. 1 и 2, причем обе коробки включены последовательно, обеспечивая три ступени передачи. В данном примере каждая коробка содержит четыре группы планетных колес. Эксцентричное тело 13а в коробке А больше эксцентричного тела 13Ь в коробке В. Маховые массы рассчитаны таким образом, что при определенном числе оборотов соотношение между центробежными моментами маховых масс и вращающими моментами, получаемыми колесами от ведущего вала в коробке А будет больше, чем в коробке В. Если будут добавлены еще коробки передач, например, снаружи коробки В, то размеры маховых грузов добавочной коробки будут рассчитаны так, что при определенном числе оборотов соотношение между моментами будет меньше, чем в коробке S и т. д.
Колесо 2 в коробке А закреплено на валу 7, а втулка 56 колеса 7 в той же коробке заклинена на втулке 57 солнечного колеса 2 коробки В, каковая втулка 57 может вращаться на валу /. Коробки агрегата имеют в общем одинаковое устройство и могут вращаться независимр друг от друга на буксах (гильзах), надетых на вал / и на втулки 56 и 8.
Таким образом, в данном примере получаются две ступени редукционной передачи, из которых одна имеет меньшее, а другая-большее передаточное число.
Соотношения величин двух солнечных колес 2, 7 и двух планетных колес 10, /7 могут быть различньг у каждой из двух коробок, и таким образом в каждой коробке могут быть получены различные передаточные числа.
Для каждой из коробок устроено тормозное приспособление, каковое на чертеже показано в виде паредвигаемой по неподвижной опоре тормозной колодки 81, которую можно подводить к поверхности коробки при помощи троса (или другого управляющего приспособления) 83, преодолевая действие пружины 82. Можно также устроить одно общее приспособление для торможения обеих коробок. Тормозы могут быть также выполнены в форме других устройств. Стопорные приспособления, препятствующие коробкам вращаться влево, выполнены в данном примере (фиг. б) в форме кулачков 58, которые могут поворачиваться в неподвижной опоре, прижимаясь к окружности коробки пружиной 59, причем ими можно управлять на расстоянии при помощи прикрепленного к плечу б(Р управляющего органа 61, например, каната, стальной проволоки, Боуд новского троса и т. п. Стопорные приспособления для всех или некоторых коробок могут §ыть выполнены подобно устройствам, показанным на фиг. 1-4, причем они могут ;быть управляемы вручную независимо друг от друга как для застопоривания, так и для освобо ждения. При желании может быть применен один общий орган для управления как стопорными, так и тормозными органами.
Передаточное устройство, показанное на фиг. 5 и б, работает в общих чертах так же, как и устройство согласно фиг. 1-4 (снабженное муфтой сцепления). При пуске в ход вала / вправо, т. е. в том направлении, при котором вращение коробки встречает препятствие со стороны стопоров 58, группы планетных колес различных коробок последовательно начинают вращаться вокруг своих
валов, благодаря чему движение вале передается через планетные группы колесу 7 коробки В, а от него через цепное колесо 8а ведомому валу. Благодаря принятым передаточным отноше ниям колесо 7 коробки В будет вращаться значительно медленнее, чем вал /. Если по каким-нибудь причинам, например, вследствие дросселирования подвода газа к двигателю, число оборотов вала / уменьшится по сравнению с числом оборотов втулки 8, скорость каковой предположена постоянной, то, как было описано в предыдущем примере, после того, как колеса 2 и 7 последовательно достигнут одинакового числа оборотов, группы планетных колес 10, 11 заставят коробку вращаться вследствие того, что начнется воздей ствие маховых грузов и планетные колеса перестанут вращаться вокруг своих валов. Таким образом внутри коробки А начнет действовать прямбе соединение валов, тогда как в коробке В, в которой солнечное колесо 2 будет теперь иметь такую же скорость, как соответствующие колеса коробки у4, передача будет происходить через колесный механизм, т. е. с редуцированием скорости. Если скорость вала / перестанет уменьшаться, то указанные условия работы в отдельных коробках сохранятся, так как вращающий момент центробежной силы в коробке А больше, чем в коробке В, в которой при данном числе оборотов центробежный момент все еще преодолевается вращательным моментом, получаемым планетными колесами от вала /. Если же скорость вала 7 понизится еще больше, так что колесо 2 коробки В получит наконец такую же скорость как и колесо 7 той же коробки, то и в этой коробке под влиянием центробежной силы планетнь е колеса начнут постепенно останавливаться относительно своих валов и заставят коробку вращаться. Таким образом, в этом случае ведущий и ведомый валы окажутся связанными прямой передачей. Подобньж же процесс произойдет, если число оборотов ведомого вала по какой-нибудь причине повысится по сравнению со скоростью ведущего вала. Если при работе на прямой передаче мотор будет перегружен или сопротивление ведомого в|1лэ 909растет, получится переход на редукционную передачу, как было описано по отношению к фиг. 1-3, Сначала этот переход произойдет в коробке В, как только скорость вала / понизится настолько, что вращающий момент центробежной силы будет преодолен в, этой коробке вращающим моментом вала 7, причем коробка А будет пока продолжать работать на прямом сцеплении до тех пор, пока скорость вала 7 не понизится далее настолько, что и в коробке А центробежная сила не сможет более удерживать планетные колеса неподвижными; в. этот момент произойдет переход на редукционную передачу, и мотор ускорит свое вращение на некоторое определенное число оборотов. Таким образом переход с одной ступени на другую происходит автоматически и плавно.
С помощью тормозов (или тормоза) можно в случае надобности совершенно остановить вращение одной или обеих коробок, например, при торможении с помощью мотора; таким образом торлоз может быть между прочим применен для той же цели, как и муфта сцепления, чтобы вызвать переход от прямой передачи к редукционной.
Если прибавить еще одну коробку передач, то получится четырехступенчатая передача.
Можно и в этом случае применить муфту сцепления, подобную описанной выше или другой конструкции, и при ее помощи сцепить с моторным валом весь комплект коробок.
На фиг. 7 и 8 показана /несколько отличающаяся форма выполнения двухступенчатой передачи, предназначенная автомобилей. Здесь солнечное колесо 2 вращается на валу 7 при помощи роликового подшипника 62 или при помощи другого устройства, а валы 14 планетных колес вставлены в блок 63, заклиненный на валу 7. На выступающую из коробки втулку колеса 2 навинчен или другим способом укреплен диск 64, удерживаемый в своем положении стопорной гайкой 65 и снабженный на своей периферии фланцем 66, к наружной стороне которого может прижиматься тормозная колодка 67 v т. п., устроенная, например, подобно колодке, изображенной на фиг. 5 и б, внутренняя же сторона фланца может захватываться роликом 68 застопориваю.щего роликового приспособления 69, укрепленного на кожухе мотора и имеющего известное устройство. Это стопорное устройство препятствует солнечному колесу 2 вращаться влево. Солнечное колесо 7 может при помощи роликового подшипника 70 или другого подобного же устройства вращаться на центральной, заклиненной на валу /, части блока 63. Между втулкой 8 колеса 7 и наружной поверхностью вала 7 помещен антифрикционный подпятник 7/, удерживаемый при помощи навинченного на конец вала упорного кольца 72, закрепленного шплинтом 75, а также при помощи ввинченного во внутреннюю поверхность втулки кольца 74. На втулку (9 навинчена крышка 75 с содержащей пружину коробкой 76, причем на окружности этой коробки укреплено цепное колесо а или другой соответствующий орган. Коробка 75, 16 передачи снабжена уплотненями 77, примыкакЬщими к втулкам солнечных колес. Коробка увлекается во вращение блоком 63.
Для увеличения центробежного эффекта группы планетных колес снабжены как эксцентрично расположенными телами 13, так и отверстиями 78, сделанными в теле колеса.
Солнечное колесо 2 выполняет здесь ту же функцию, какую выполняла в предыдущем примере коробка передачи. Способ действия сводится вкратце к следующему. При пуске в ход моторного вала 7 вместе с планетными колесами вправо солнечное колесо 2 не может вращаться благодаря стопорному приспособлению. Планетные колеса начинают вращаться и сообщают ведомому колесу 7 скорость в соответствии с соотношением величин обоих солнечных колес. Переход, от редукционной передачи к прямой происходит, как описано выше, например, путем моментального выключения мотора, или уменьшения его скорости, или увеличения числа оборотов ведомого вала. При этом под действием ведомого солнечного колеса колесо 2 приходит во вращательное движение по направлению вращения моторного вала соответственно замедлению этого вала (и планетных колес) и при достижении одинаковой скорости с моторным валом сцепляется с последним непосредственно благодаря действию центробежной силы на маховые грузы. При этом планетные колеса будут оставаться неподвижными относительно своих валов. Если затем число оборотов мотора снова увеличится или мотор снова будет включен, то вращающий момент центробежной силы увеличится и валы останутся соединенными на прямую. Наоборот, если число оборотов моторного вала благода15я повышенной нагрузке понизится, то уменьшится и вращающий момент центробежной силы и когда он станет меньше вращающего момента, получаемого планетными колесами от моторного вала, планетные колеса начнут вращаться вокруг своих осей, благодаря чему привод снова будет происходить через редукционную передачу.
Последняя из описанных конструкций отличается между прочим тем преимуществом, что маховая масса всегда вращается вместе с моторным валом, и может заменить собою маховик для мотора.
И в этой конструкции тоже может быть добавлена муфта сцепления.
В приведенных примерах описана передача в применении к моторной повозке, но то же самое устройство может быть, применено и для других случаев.
С помощью описанных выше различных приспособлений можно получить очень простую и в то же время надежную конструкцию механизма передачи, в которой переход на различные ступени может происходить плавно без включений, сопряженных с затратой усилий, без толчков и автоматически, но в то же время переходом можно управлять вручную. Механизм может заключать в себе как две, так и несколько ступеней передачи.
Предмет изо б р е т е н и я.
1. Автоматическая переменная передача, заключающая в себе систему планетных колес, снабженных эксцентрично расположенными грузами и поддерживаемых поворотной около общей оси системы коробкой, отличающаяся тем, что планетные колеса снабжены двумя разного диаметра венцами, связанными общим
корпусом и сцепленными с отдельными насаженными соответственно на ведущий и ведомь1Й валы солнечными колесами, причем коробка планетных колес или насаженное на ведущий вал солнечное колесо могут вращаться в сторону вращения этого вала, обеспечивая при со ответствующем подборе веса и эксцен триситета грузов возможность прямой передачи. ,
2.Форма выполнения передачи по п. 1, отличающаяся тем, что насаженное на ведомом валу солнечное колесо жестко закреплено на последнем и имеет больший диаметр, чем солнечное колесо, насаженное на ведущем валу.
3.Форма выполнения передачи по п. 1, отличающаяся тем, что вес и эксцентриситет грузов на планетных колесах подобраны таким образом, чтобы при равном числе оборотов ведущего и ведомого валов вращательный момент, создаваемый центробежной силой этих грузов, превосходил или был равен вращательному моменту, получаемому планетными колесами от ведущего вала.
4.Форма выполнения передачи по п. 1, отличающаяся тем, что для устранения вращения коробки планетных колес или насаженного на ведущий вал солнечного колеса в направлении, обратном вращению вала, применено стопорное устройство, действующее автоматически или приводимое в действие вручную.
5.Применение в передаче по п. 1 для синхронизации оборотов ведущего и ведомого валов для прямой передачи достигается или снижением оборотов ведущего вала, например, путем уменьшения мощности двигателя или повышением тем или иным способом оборотов ведомого вала,
6.Применение в передаче по п. 1 тормозного устройства для произвольной остановки вращения коробки планетных колес или насаженного на ведущем валу солнечного колеса.
7.Форма выполнения передачи по п. 1, отличающаяся тем, что для возможности произвольного перехода с прямой на редукционную передачу ведущий вал соединен с насаженным на него солнечным колесом посредством муфты сцепления.
§. Форма выполнения передачи по rt. 7, отличающаяся тем, что органы управления муфтой сцепления расположены на неподвижных опорах,
9. Форма выполнения передачи по п. 4, отличающаяся тем, что стопорное устройство для устранения вращения коробки планетных колес или насаженного на ведущий вал солнечного колеса в направлении, обратном йращенинэ этого вала, составлено из неподвижного зубчатого венца, расположенного концентрически с ведущим валом, и из поворотно укрепленных на коробке или на солнечном колесе собачек, прижимаемых пружинами к зубчатому венцу и рассчитанных таким образом, чтобы при вращении коробки или солнечного колеса в направлении ведущего вала они могли под действием центробежной силы откидываться от периферии зубчатого венца против давления пружин.
10.Форма выполнена передали fid п. 1, отличающаяся тем, что для увеличения числа ступеней передачи применены две или более планетарных систем, причем ведомое солнечное колесо, ближайшей к ведущему валу системы, соединено с ведущим солнечным колесом следующей системы, а эксцентрично расположенные на планетных колесах грузы выбраны более тяжелыми для более близкой к ведущему валу системы, так что при определенном числе оборотов момент, создаваемый центробежной силой грузов, получается у ближайщей к ведущему валу системы более высокий, чем у следующей системы.
11.Форма выполнения передачи по п. 10, отличающаяся тем, что коробки планетных колес разных систем могут вращаться независимо друг от друга и могут обслуживаться отдельными стопорными и тормозными устройствами.
патенту ин-ца Г. Ф. ЛуМдйбйст М 50182
Фиг1
к патенту ин-ца Г. Ф. Лундквист № 50182
Фип
55
;
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ МОЩНОСТИ (ВАРИАНТЫ) И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1999 |
|
RU2267042C2 |
| Передача с автоматическим изменением передаточного отношения | 1928 |
|
SU47983A1 |
| Стартер для двигателей внутреннего горения | 1928 |
|
SU44875A1 |
| Устройство для передачи движения при помощи двойных планетных зубчаток к перегрузочному вентилятору для двигателей внутреннего горения | 1930 |
|
SU31342A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С АВТОМАТИЧЕСКИМ ИЗМЕНЕНИЕМ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 1933 |
|
SU45877A1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| Шарнирное сцепление валов | 1933 |
|
SU35508A1 |
| Зубчатая передача к гусеничным лентам повозок | 1931 |
|
SU38433A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2114345C1 |
| Коробка передач | 1983 |
|
SU1191656A1 |