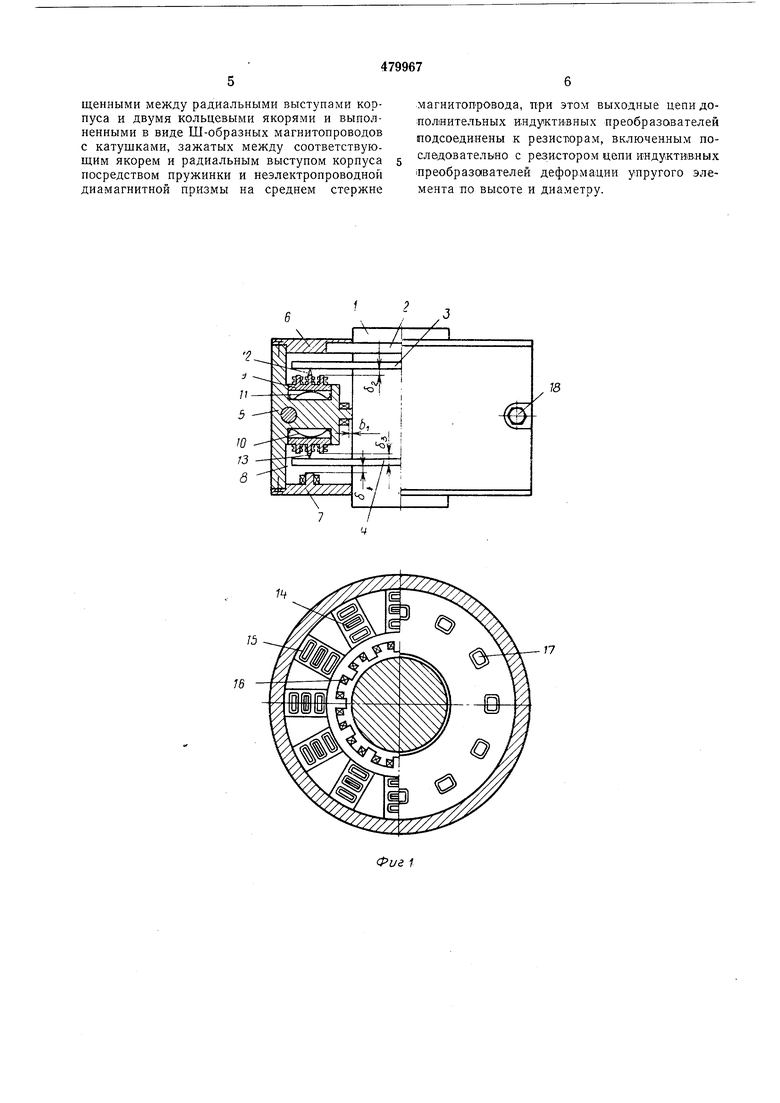
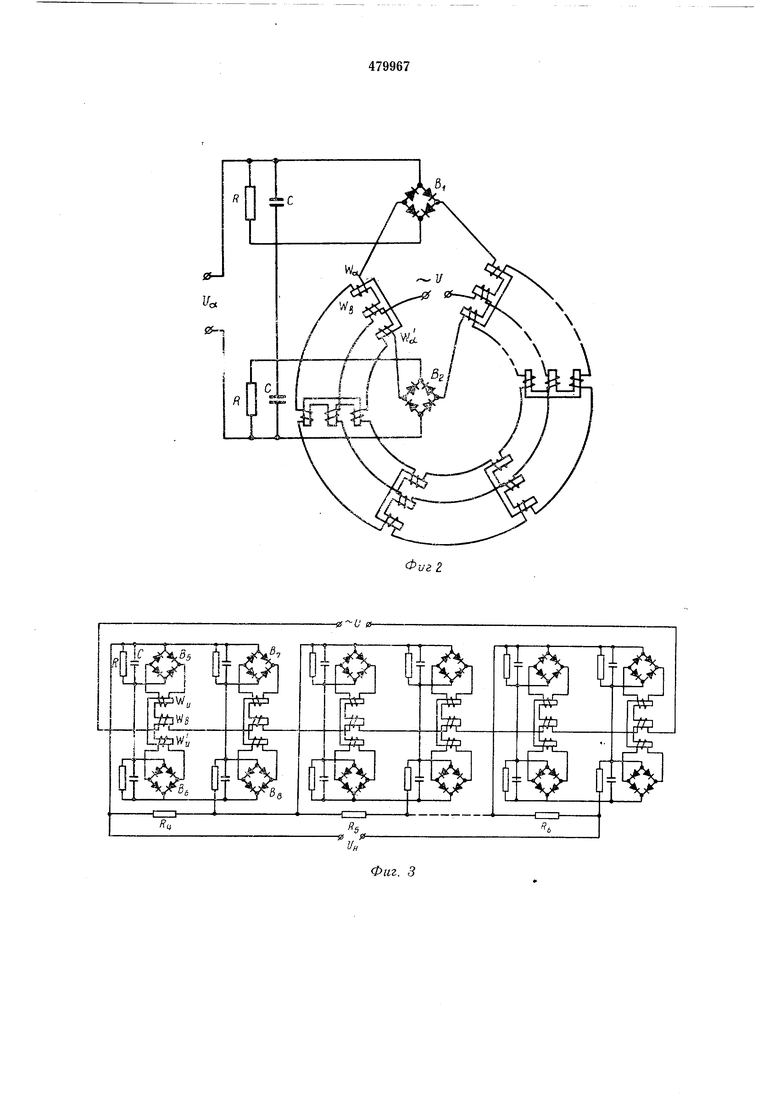
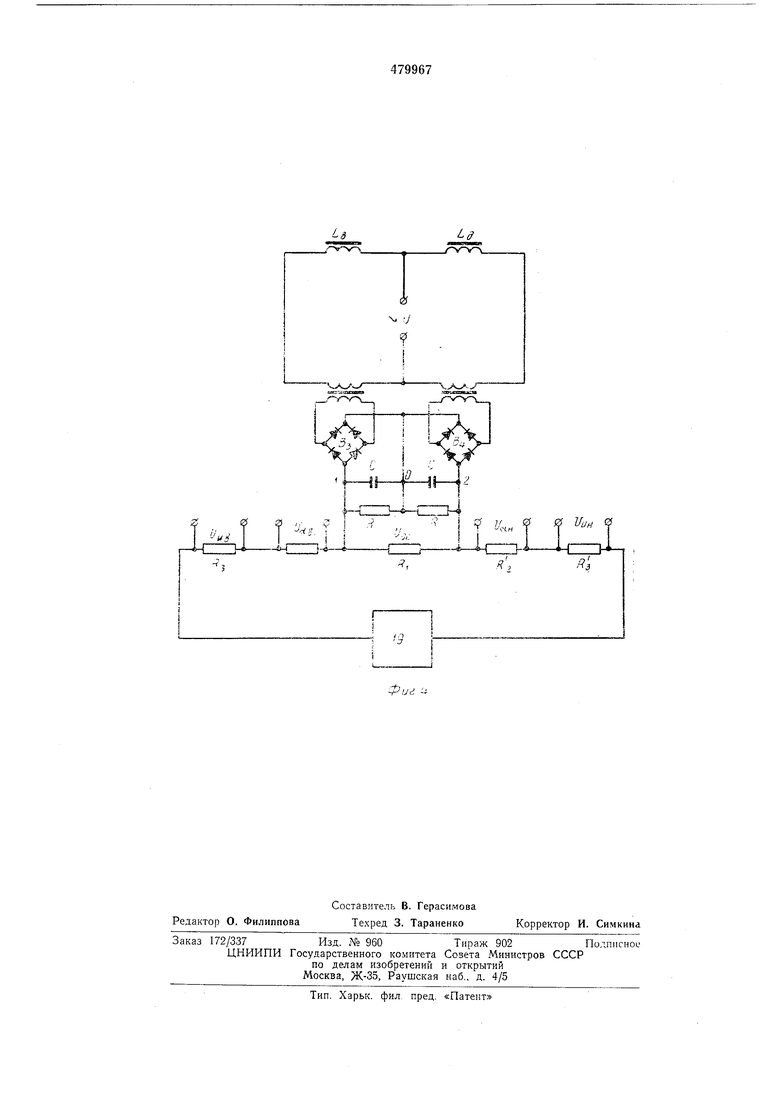
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИ1 дуктивного преобразователя деформации упругого элемента по высоте; магнитопроводы 8 и 9 индуктивных преобразователей углов поворота опорных поверхностей упругого элемента; пружины 10 и //; призмы 12 и 13 из неэлектролроводного диа мапнитного материала; катушки обмоток возбуждения 14 и измерительные катушки 15 индуктивных преобразователей углов поворота опорных поверхностей ynipyroro элемента; катушки 16 индуктивного преобразователя деформации упругого элемента по диаметру; катушки 17 индуктивного преобразователя деформации упругого элемента по высоте и соединительный болт 18. Между якорями упругого элемента и магнитопроводами индуктивных преобразователей выполнены зазоры fi, б, бд и бз. Катушки индуктивных преобразователей 16 и 17 включены между собой носледовательно н образуют две цепи LB и Ьд, включенные по дифференциально - трансформаторной схеме (фиг. 4), причем д фиксирует деформацию диаметра, а La - высоты упругого элемента. Обмотки возбуждения дифференциальных магнитных цепей W (фиг. 2) катушек 14 (фиг. 1) соединены между собой последовательно и включены на напряжение питания. Обмотки дифференциальных магнитных цепей и (фиг. 2) катушек 15 (фиг. 1) соединены последовательно и включены на полупроводниковые вьвпрямители, а с тих на емкостно-омические фильтры RC, причем напряжения с резисторов фильтров включены между собой дифференциально, а образовавшаяся (разность потенциалов t/a от магнитной цепи, расположенной .под верхней опорой, подана на резистор (фиг. 4). Напряжение «н от магнитного преобразователя расположен;ного над нижней опорой, подало на резистор R2 (фиг. 4). Обмотки Wi, и Wf, (фиг. 3) дифференциальных магнитных цепей нагружены на полупроводниковые выпрямители В, В и после фильтрации на емкостно-омических фильтрах их напряжения включены дифференциально на резистар 4- На этот же резистор подана разность потенциалов с аналогично включенной мапнитной цепи, но 1ра1сположеня.ой ,с противоположной стороны на одном и том же диаметре. Напряжения на резисторах 4, К .. . Rn суммируются между собой, так как они включены последовательно и образовавшееся напряжение t/,, подается на резистор (фиг. 4) от верхней опоры f/Hg и на резистор Rz- от нижней опоры. Устройство, работает следующим образом. При равномерном приложении нагрузки к торцам элемента 1 он деформируется без искажеиия формы боковой поверхности и изменяет зазоры б и 6i в цепи основного контура, зазоры бг и бз не изменяются. Изменение зазоров б и 6i приводит к изменению реактивгтаго сопротивления обмоток LB и Lд. В результате разность потенциалов между точками О- 1(фиг. 4) увеличивается, а между точками О- 2уменьшается и на резисторе RI возникает разность потенциалов f/o, зависящая от величины приложенной к опоре силы, что зафиксирует измерительный прибор 19. При отсутствии нагрузки параметры схемы должны быть подобраны так, чтобы напряжения f/ид; OB с к и были равны нулю. Если измеряемое зсилие приложено к опорным поверхностям упругого элемента / неравномерно, то кольцевые якори 3 и 4 повернутся отно.сительно своего лервоначальиого положения. Одновременно корпус 5 получит дополнительное перемещение, 1ВЫ31ва1Н1Ное воздействием искажения формы боковой поверхности упругого элемента, а также произойдет дополнительное изменение зазора б за счет поворота нижнего якоря 4 упругого элемента. Поворот якоря, расположенного у верхней опор.ной поверхности упругого элемента, вызывает вертикальное перемещение магнитопровода Я который под действием пружины /,/ следует за якорем. При этом величина зазора бг над катушкой возбуждения 14 остается неизменной, в то (Время как величина этого зазора по одну сторону от этой катушки увеличится, а по другую-уменьшится, и на выходе цепей компенсации получают напряжение, зависящее от усредненного угла поворота а под верхней Оа и под нижней f/dj, опорами, которые скомпенсируют ошибку, вызванную симметричными неравномерными распределениями усилий на опорных поверхностях упругого элемента. Для компенсации погрешности от изгиба верхней или нижней опор упругого элемента напряжения, зависящие от угла поворота по обеим сторонам от цилиндра упругого элемента, вычитаются друг из друга (фиг. 3), а полученная разность потенциалов зависит от изгиба сечения и скомпенсирует ошибку в измерении усилия, вызванную изгибом верхней /7„ и нижней /7и„ опор. Предмет изобретения Устройство для измерения усилий, содержащее цилиндрический упругий элемент с кольцевым якорем у основания, индуктивные преобразователи деформации упругого элемента по высоте и диаметру, магнитопроводы которых размещены на нижней крышке и радиальных выступах корпуса, а обмотки включены по дифференциально-трансформаторной схеме, и измерительный прибор, отличающееся тем, что, с целью уменьшения погрешности измерения от неравномерности распределения усилий по площадям опор упругого элемента, оно снабжено вторым кольцевььм якорем, расположенным на цилиндрическом упругом элементе вблизи верхней опорной поверхности его, и дополнительными индуктивными преобразователями углов поворота опорных поверхностей упругого элемента, размещенными между радиальными выступами корпуса и двумя кольцевыми якорями и выполненными в виде Ш-образных магнитопроводов с катушками, зажатых между соответствующим якорем и радиальным выступом корпуса посредством пружинки и неэлектропроводной диамагнитной призмы на среднем стержне
магнитоПровода, при этом выходные цепи дополнительных индуктивных преобразователей подсоединены к резисторам, включенным последовательно с резистором цепи индуктивных преобразователей дефор.мации упругого элемента по высоте и диаметру.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ МЕЖДУ ДВУМЯ ТОЧКАМИ ДЕТАЛИ | 1972 |
|
SU360541A1 |
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1987 |
|
SU1605286A1 |
| СИСТЕМА ДЛЯ СБОРА ЭЛЕКТРОЭНЕРГИИ С ЖЕЛЕЗНОДОРОЖНЫХ ПУТЕЙ | 2017 |
|
RU2666073C1 |
| Буксировочный динамометр | 1978 |
|
SU787914A1 |
| Дифференциальный индуктивный преобразователь перемещений | 1980 |
|
SU937991A1 |
| Преобразователь перемещений | 1988 |
|
SU1587322A1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1990 |
|
SU1767567A1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ВЫБРОСОВ НАПРЯЖЕНИЯ С ПОДВИЖНЫМ ЭЛЕКТРОДОМ | 2003 |
|
RU2327242C2 |
V
0Фиг. 3
