1
г Изббретешю относится к области сенситометрического приборостроения и предназначено для контроля и измерения свойств сЬотографическюс материалов при их производстве а также для различных областей науки и , гле по величине оптической .плотности: сУютоэмульоий необходимо регистрировать абсолютные -данные других физических явлений или параметров (химический состав, интенсивность радиоактивности и т.д.)
Известны автоматические микроденсидометры, построенные на компенсащонных методах измерений оптической плот:ности, использующие в качестве приводашаговый двигатель и представляюище результат измерения плотностей в цифровом виде.
Известные приборы имеют низкую производительность в силу того, что в них пршленяется известная компенсационная схема измерения оптической плотности со следящей системой, а также из-за использования набора сменных клиньев, ограничивающих диапазон непрерывного измерения оптических плотностей. Привод стола микроденситометра имеет низкое быстродействие и недостаточную точность. KpOMj того, привод не, позволяет им регулировать в необходимых переделах скорость перемещения стола в . зависости от. изменения оптической плотностп по полю образца. В процессе измерений вся иноюрлация заносится в ЭВМ или ре-, гиструётся на носитель, в результате чего за счет.избыточности информации сьшжается срорость ее nepepadoTKii.
Целью изобретеьжя является повышение производительности и точности измерения.
Зто достигается тем, что в схемы управления шаговыми двигателями включены блоки оптимизащш, кажды11 из которых состоит из потенциального деши- ; фратора, ключевого устройства, вмфратора, счетчика- тормозных импульсов и сравнивающего устройства, соединенных мевду собой последовательно, при этом . вход потенциального Дешифратора каждого из блоков оптимизации соединен с
выходом соответствующего-счетчика перемещений стола, а выходы сравнивающего устройства каждого из блоков через ло- зтические элементы и стробирукхцие устройства соединены с управляющими входами импульсных депшсрраторов коштутатора соответствующего шагового двига- .теля привода стола.
. I изображена функциональная рхема автоматического микроденситомет-, ;paj на фиг. 2 - схема управления шаго-1
Бым двигателем одной из координат стола-препаратоводителяо
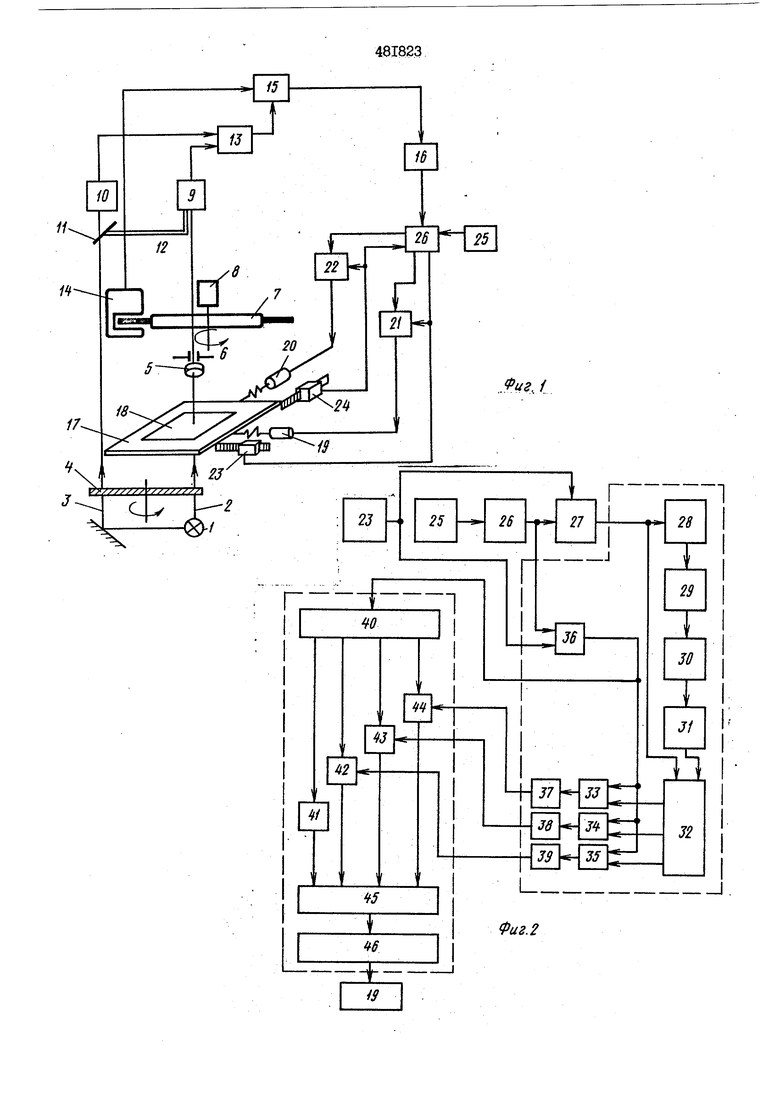
Автоматический плфровой микроденситоглетр включает в себя отол-препаратоводитель о исследуемым образцом, две идекти:чные управлешш двигафеля-шГ перемёщешш по двутл взаиьшо перпекдикулярным осям (1 и У) S, сптическую 11змериа ельну1о систеглу;, построенну1э на
пр-1НЩпе Д1шашч 8скоЁ кЪьЕтенсэдии/ устройство считывания величи-ш оптической плотности, электронную тельную машину (ЭВМ) и блок сопршсеШШ с ЭВМ.
Оптическая измерительная сиотема состоит из осветителя I, который соз-дает два световых луча 2 и 3, махаштческого модулятора 4, представляющего собой диск с отверстияюг, микрообъек™ тива 5, диафраггш 6, измерительного клина у, приводимого во вращение двигателем 8, основного 9 и вспомогательного 10 фотопрнемштков, ползшрозрачного зеркала II, световода 12 сравнивающего устройс.тва 13, Измерительный представляет собой даоКэ плотность которого изменяется линейно по длине окрркнооиг. На клине нанесена штриховая дорО}жа преобразователя угол-код.
Устройство считываш я величины оптической плотности состоит из .а угол-код 14 S ключевой схемы 15 в: б йеркого регастра 16
Стол-препаратовод 1тель 17 о исследуемым образцом 18 перемещается в двух взаимноперпендгпс/дащ-шх направлеш/шу. о помощьюшаговых двигателей 19 и 20. управляемых дву.ш идентлчвьтш схека /ш управления 21 и.,22, Go столом сЕязанн датчики линейных перемещений 23 представляющее собой растровые решеТШг.; штрихи которых считываются йотоэлект-ричесШШ методом.
Управление автомат-ическем гжкроден-ситометром осущесткляе-тся ЭВМ 25 через блок сопряжешш 26,
Схема управления шаговгш двигателем (см. {toe 2) состоит из счетшка перемещения 27, в который КЗ ЭВМ 25 череэ блок оптюжзации, вклпочающего в себ;.;, потенциальный дешифратор 28, р;личев:рэ схему 29, шифратор30 и счетчик тор-мозных И1 шульсов31, которые соединегда между собой последовательно и служат для определеюш числа тормозвнх кгшульсов в функшш ве,;Е1Ч11Ны перемещеш1Я.г заданного из ЭВМ и затесанного в счетч: -ке 27. Код числа тормозных имщгльсов и код заданного перемещешет о выхода счетчика 27 поступают на сравнивающее устройство 32s производящее их сравнение, Выходы сравнивающего устройства 32 поступают на логнчесгше схекты 33, 34 и 35, вторые выхода крторых соединены о выходом логической схемы ИЛИ 36 входньт1и сигналами которой являются импульсы датчика перемещешя 23 и импулйс на запуск привода, поступающий из ЭВМ через блок сопряхсения 26 в начале перемещения.Вы- ходы логических, .элементов 33 34 и 35 соединены со входами стробирующих уст4
ройств 37, 38 и 39е Выходя стробирующ:ях устройств 37, 38 39 поступают на комментатор шагового двигателя, осуществляющий электрическую редукцию основного двигателя и построенный по принципу квантования кривой статического синхроШГзирующего момента по времени и по уровнЕо Коглмутатор состоит в;з счетчи:рса 40 на вход которого подаюто-- им- . пульсы с выхода схе1Ж 36« Объе :;-ет 4iiK.a равен Nm, где N -- число таь-т.ов ког.ат/тащш на основном шаге, а -.ч - стеTiQEb дробления основного шага, К мяадiiEiM разрадам счетчика 40 подклю--:автоя }зотенци;альный де1Ш1йратор 41, К (:Туршим разр 1дал/ счетчика 40 параллель1 -о лодKj.nr;4e;HH входы импз льсных деигафраторов 42, 43s и 44, Дешйратор 44 соединен со G-rpodHpyioupiM устройством 37 блока оп з:1;;:г1:зацлк5 деиштОтратор 43 со стробиру-лОд ; уоа: ройством 38 а (Тгратор 4S со стробкрующим устройством 39о ВыаторОБ 41J 42.
/1
сой,;:5л:нены с управляющими шиншда IVKIA нжтной памяти 45; в которой запиоаьш коды токов в обмотках шагового днагате,кя соответствующие различныгл пгг1о.аением ротора,, Выходное шкны ыаг;Ф:- :ч-ч;.)й памяти 45 соединены с преобразогатзляыш код-анаяог 46, выходные токи KC-TOрьсс подаются в обмотки шагового д-е:агаАвтоматичесюИГ цисфозои микроденситометр ра.ботает следующат обте,зо1/,,
Б начале работы из ЭВМ 25, через блок conpHvEeJttiH 26 з счетчяк перемещений 27 поступает код задавае 11ого паремещешая (таксш jics ин-йорглащ-ш по о ту л аQT в счетчик переыещёш я oxei/H ;шрав Л8НИЯ шаховыг; Д энгс1релим для коорлдшш ctj.Ha), После из ЭВМ (через блок сопршке;-зз:я 26; выдазтся EMipibc запуска привода на движеше. Код перемещения из счетчика 27 поступает на блок оптишиатрш, пбеспеч твающий минимальное вре1да отола для веализащи заданного 11е:1емещеШ1я, При этом повыщается произв- -тельность микроденожтометраз Это дс.лит ается путем сроршгрованкя оптй:м8льной, шазоБои диаграммы джжения привода, В зазиоимооти от чис/йа, загшсанного в перемещений 271 блок от1Л№изат;:тди вырабатывает реЯ1Ш отрэ/)отш перемещешм с учетом необхо дамого ш-юла шагов в ускоряющем и тормозном поле статора двигателя ддя точной остановил без колебаш1Й рогора, что позволяет повысить точность работы мнкроденситометра.. Д.чя этого код перемещёния из счеа ч:в;ка 27 пост;7пает на потешжальннй дешифратор 28 В зависимости от содерйамого счетчмга. 27 возбудцается одна, из выходных шин дешифратора 28, выходной сигнал которой с помощью ШШульса запуска ЭВМ через ключевое устройство 29 поступает на вход шишрато рз. 30, который в зависимости от номера/возбуддеиной выходной шиliH дешифратора вырабатывает определен1;Шй код числа тормозных импульсов, записываемых в счетчлГК тормознлх имиульсов 31. Содержимое счетчика 31 в процессе движения стола сравнивается с текущим содержимым счетчика 27 с по-мощью сравнивающего устройства 32. Сравнивающее устройство имеет три выхода. Один из этих выходов, поступаю ций на один из входов на логическую схеглу 33, нaxoдитcяJIpд высоким потенциалом в том случае, если содержимое счетчика 27 больше, чем содержимое счетчика 31. На второй вход схеглы 33
поступает через .схему 36 в начале перемещения шлпульс запуска из ЭВМ, а затем в процессе движениястола - импульсы с датчика л1Шейных перемещений 23, которые одновременно вычитаются из содерИНлого счетчика перемещений 27. Выходные шшульсы схемы 33 поступают на отробирутащее устройство 37, выход которого управляет иышульсыым дешифратором 44 коммутатора. Этот дешифратор осуществляет режим разгона за счет оперелгалощего смещеюш кривой статического.
синхрош зирующего момента двига геля. Как только содержимое счетчика 27 сравняется, с содерж1ШЫ1.л счетчика тормозных импульсов 31, цепь 33, 37 отключается
и включается аналогичная цепь 34, 38, При этом выходной импульс стробирующего устройства 38.подается на импульсный дешифратор 43, обеспечивающий реЖ1Ш торможеШШ, Когда в счетчике 27 остается игшульс, BKjno4aeTCH цепь 35, 39s обеспечивающая прохождение импульсов со cxeiviH 36 на иглпульсный дешифратор 42, который осуществляет фиксащгю магнитного поля в конечном положении с,
После прихода последнего импульса с датчика перемещения 23, логические схемы 33, 34 и 35 зашфаются, а ротор двигателя устанавливается в конечное заданное положение о
Одновременно с блоком оптимизации работает коммутатор шагового двигателя. На счетчик 40 коттутатора поступают правляюац.1е; и яIyльcы с выхода схемы36.Шадщ 1е разряды счетчика 40 подюючены к потенциально1 1у дешифратору 41, а cTapmiie - к И1-лпу 1ьсны1Л дешифраторам 42, 43, 44. Эти дешифраторы управляют мапштной памятью 45 При поступлении импульсов с одного из стробирую1цих устройств блока оптиМТзащш в зависимое- ти от режима движения (разгон или торожение) происходит считывание из магнитной памяти 45 кодов обмоточных токов шагового двигателя, соответствующих данному положению ротора. Эти коды, поступают на преобразователи код-алаог 46,выходы которых подключаются к обмоткам шагового Двигателя.
После отработки заданных перемещений по координатам X и У и остановки стола выдается команда па. измерение оптиеской плотности. Измерение производится следуквдим образом. Измерительный световой поток И модулируется модулятором 4, после чего проходит через исследуемый образец 18S микрообъектив 5, ; диафрагму 6 j а затем попадает на изме-::,.
рительный клин 7., который приводится i во вращение с постоянной скоростью двигателем 8. Пройдя через измерительный клин, измерительный световой поток попадает на основной (Тотоприемьшк 9. Опорный световой поток 3 модулируется модулятором 4 в противогТазе с измерительным потоком и попадает на полупрозрачное зеркало II. Часть опорного потока, отразившаяся от зеркала II, через световод 12 попадает на основной фотоприемник 9, а та его часть, которая прошла через зеркало II, воспринимается вспомогателыи/ (отоприеш-спсо:,,
10, выходно сигнал которого используется в качестве сигнала опорной частоты (частоты модулятри) и подается на сравштвающее устройство.
На пютоприеглш ке 9 сводятся опор.ный и йзмерителы-шй потои1,промодулированные в противосТазе. Вькодной сигнал этого. сТютоприеьжнш поступает на сравнивающее устройство 13, в котором сигналы, пропорциональные опорному и
измерительному потокам, разделяются и сравниваются. В момент из равенства на выходе сравнивающего устройства 13 появляется и шульс. Оптическая измерительная часть гликроденситометра настраивается так, что
Фо Фо 10,
где Фп - опорный световой поток, Фр - измерительный поток,
П
тах- максимальная оптическая шют-, ность, измеряемая ьмкроденоитометром,
При- этом измеряемая оптическая шют-, ность пропорциональна углу поворота из-;
мерительного хсомна в ьюмент равенства i опорного и измерительного световых потоков. ПреобраздваШ1е утла поворота клина в цифровой код производится о помощью датчика угол-код 14. При появлении импульса на выходе сравьшвающего устройства 13 открывается ключевая схема 15 и производгттся занесеш1е цийрового кода результата измерения оптической плотности из датчика угол-код 14 в буфёрнМй регаст-о 16. После этого по команде из ЭВМ 25 щиЪровой код результата измерения из буферного репют-ра 16 заносится через блок сопря;хеш1Я 26 в ЭВМ. Затем работа микроденситометра повторяется в .ош-юанной последовательности до окончания заданной програмгш измерений.
Предмет изобретения
60
Автоматический цифровой кадкроденситометр с измерением оптической плотнос.ти компенсационным методом, состоящ-ий из блока сканирования с шаговым приводом стола и с использованием дроблешш основного шага двигателя, блока с ютометрирования с круглы1 1 поворотным оптическим клином, блока управления и ЭВМ, отличающийся тем, чтр,
,с целью повышения производительности
и точности измерения, в схемы управления шаговыми двигателями включены блоки оптимизации, каждый из котохшх сое-, тоит из потенциального дешифратора, ключевого устройства, шифратора, счетчика тормозных импульсов и сравнивающего устройства, соединенных может со-, бой последовательно, при этом вход потенциального дешифратора каждого из
8 :
блоков оптимизации соединен с выходом соответствующего счетчика перемещений стола, а выходы сравнивающего устройства каждого из блоков через логические элементы и стробирующие устройства соединены с управляющими входами импульсных дешифраторов коммутатора соответствующего шагового двигателя привода стола.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода изображения | 1981 |
|
SU1032443A1 |
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |
| Устройство для считывания графической информации | 1974 |
|
SU670943A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1987 |
|
SU1481714A2 |
| Фотометрическая установка для регистрации быстропротекающих процессов | 1988 |
|
SU1562713A1 |
| Система для обработки фильмовой информации | 1978 |
|
SU734702A1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| Устройство для дистанционного управления | 1985 |
|
SU1287185A1 |
| Денситометр-анализатор | 1971 |
|
SU479072A1 |
| Устройство для измерения линейного размера детали | 1986 |
|
SU1335809A1 |