(54) МАГНИТО-МОДУЛЯЦИОННЫЙ ДАТЧИК УГЛСВОГО
ПОЛОЖЕНИЯ
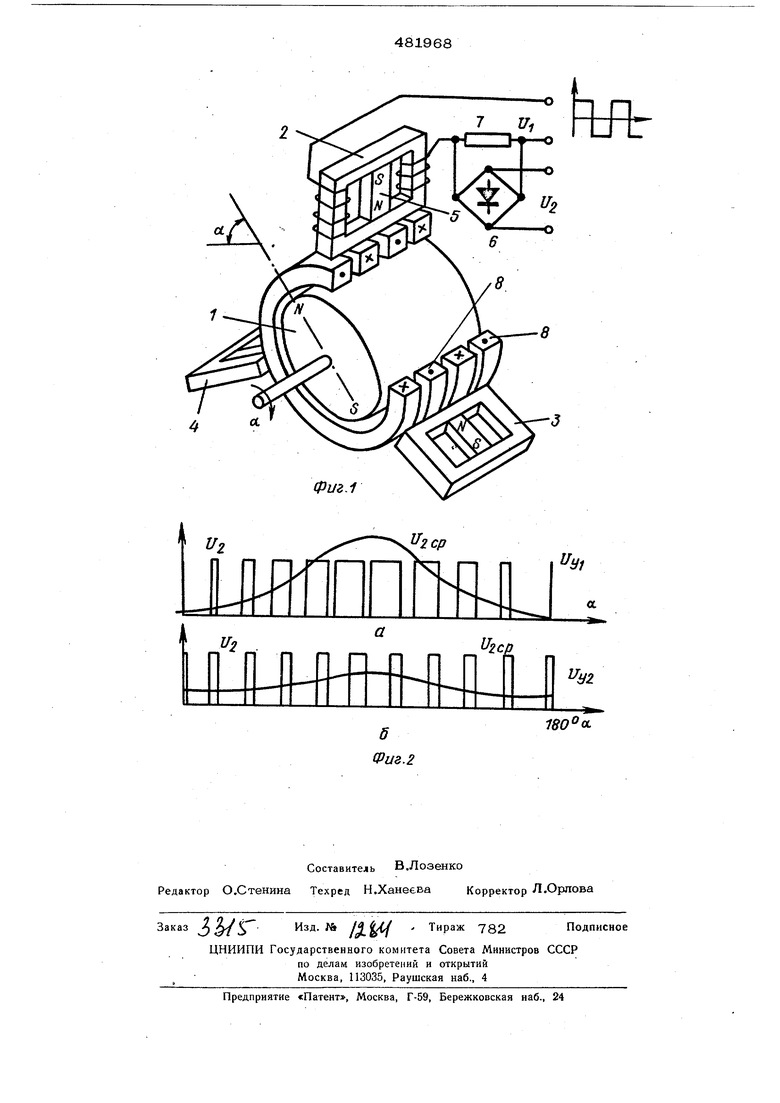
Предлагаемый датчик состоит из 1 в виде постоянного магнита и трех индуктивных чувствительных элементов 2, 3, 4, расположенных на статоре и сдвинутых один относительно другого на фиксированный g угол, определяемый, например, числс л фаз и полюсов электродвигателя. Каждый индуктивный чувствительный элемент состоит из: сердечника изферро магнитно го материала с обмоткой, подключенной к источнику высоко- о :частотного напряжения (J 4 прямоугольной ормы и дополнительного постошшого магнита
5,подмагничивающего сердечник (на фиг.1 обмотка и дополнительный постоянный магнит обозначены лишь для индуктивного15 чувствительного элемента 2). Конструктивные параметры чувствительного элемента
и питающие напряжения U выбираются с таким расчетом, чтобы при отсутствии влияния подвижного магнита среднее напря- 20 жение на выходе выпрямительного моста
6,подключенного к резистору рабочей цепи 7, составляло половину от питающего напряжения U .
25
При изменении угла Of положения ротора
1 относительно плоскости сердечников чувствительных элементов его Магнитное поле изменяет начальное подмагничивание, которое обеспечивается неподвижными магнита- ол ми. Если направление составляющей потока ротора, действующей вдоль плоскости сердечника, совпадает с потоком неподвижного магнита, то относительная длительность выходного напряжения чувствительного эле- 35 мента увеличивается, и наоборот. Параметры датчика выбираются так, чтобы при 1 согласном совпадении направлений намагни-i чивающих сил указанных магнитов относительная длительность импульсов равнялась i . 40 единице, а при встречном - нулю. В результате
ри вращении ротора относительная длительносга, импульсов изменяется от О до 1 по сину- ; соидальному закону. На фиг. 2, а, показано изменение этих импульсов и их среднего 45 значения при изменении угла для одного ; из чувствительных элементов. Для других , Элементов кривые аналогичны, но сдвинуты а 12О эл.град.
Для изменения глубины модуляции, т.е. 50 ределов изменения относительной длительости импульсов ротора 1 обхвачен управйемым магнитным шунтом, который выполен в виде четного числа ферромагнитных
ердечников 8 с обмотками управления на 85
каждом из них. При отсутствии управляющего напряжения на соединенных последовательно обмотках подмагничивания
сердечников магнитного шунта отсутствует ;и модуляция ВЫХОДНОГО напряжения датчиков, так как поток ротора полностью замыкается по сердечникам , шунта.
Предмагничивание шунта приводит к том что часть потока ротора выходит за его пределы и осуществляет модуляцию выходн го напряжения чувствительных элементов (на фиг. 2,6, показаны эпюры напряжений при некотором прсж ежуточном подмагничивании щунта при У ).
В результате взаимодействия роуора и щунта внешнее поле .деформируется, и для того, чтобы сохранить синусоидальный характер модуляции, шунт выполняется в виде четного числа подмагничиваемых во встречных направлениях сердечников (на фиг. 1 эти направления показаны точками и крестиками в сечениях сердечников). При использовании этого датчика углового положения в бесконтактных двдп ателях постоянного тока с позиционно зависимой мод ляцией фазных напряжений просто осуществляется регулирование скорости вращения путем подмагничивания щунта. Возможны также и другие варианты использования изобретения, например, в качестве управляемого датчика углового положения объектов множительного функционального устройства, когда один из сомножителей - угол, а другой - напряжение.
П р е д м е т изо б р е т е н и я
Магнито-модуляционный датчик углово-. ; го положения, например, ротора бесконтактного электродвигателя постоянного тока, содержащий индуктивные чувствительные элементы и дополнительные магниты, установленные попарно на статоре с фиксированным углом сдвига, и вращающийся постоянный магнит модулятор, отличающийся тем, что, с целью изменения глубины щиротно-импупьсной модуляции выходного сигнала, датчик снабжен установленным на статоре между чувствительными элементами и магнитом-модулятором управляемым магнитным щунтом, выполненным из четного числа подмагничиваемых во встречных направлениях тороидальных сердечников, несущих обмотки управления.
«X
Фш.1
U2
2
ZZfWr
Uyi
яг
180° (Ч.
б Фиг.2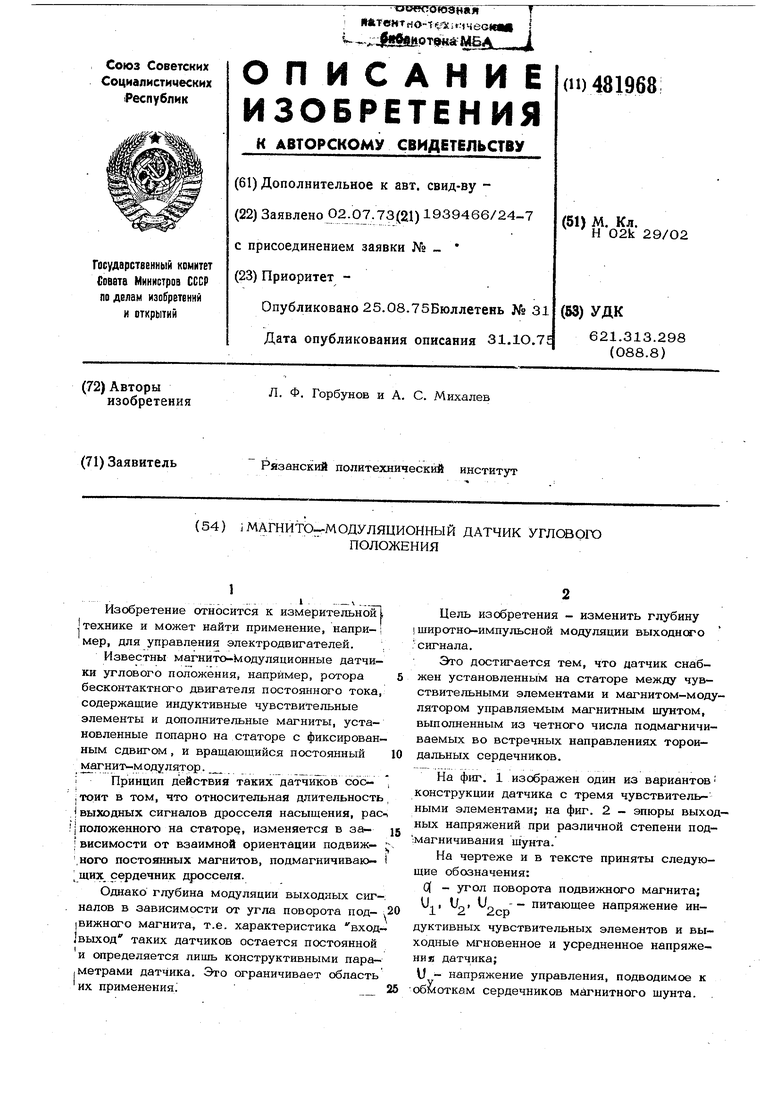
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения ротора | 1979 |
|
SU817895A1 |
| Индуктивный датчик положения | 1980 |
|
SU881525A1 |
| Синхронная переменнополюсная электрическая машина | 1973 |
|
SU599316A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Регулируемая синхронная электрическая машина | 1982 |
|
SU1095319A1 |
| Индуктивный датчик угловых перемещений | 1978 |
|
SU765944A1 |
| СТАБИЛИЗИРОВАННЫЙ СИНХРОННЫЙ ГЕНЕРАТОР | 1996 |
|
RU2159983C2 |
| Сверхпроводниковая индукторная электрическая машина с комбинированным возбуждением | 2018 |
|
RU2696090C2 |
| Датчик положения | 1979 |
|
SU853368A1 |
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |