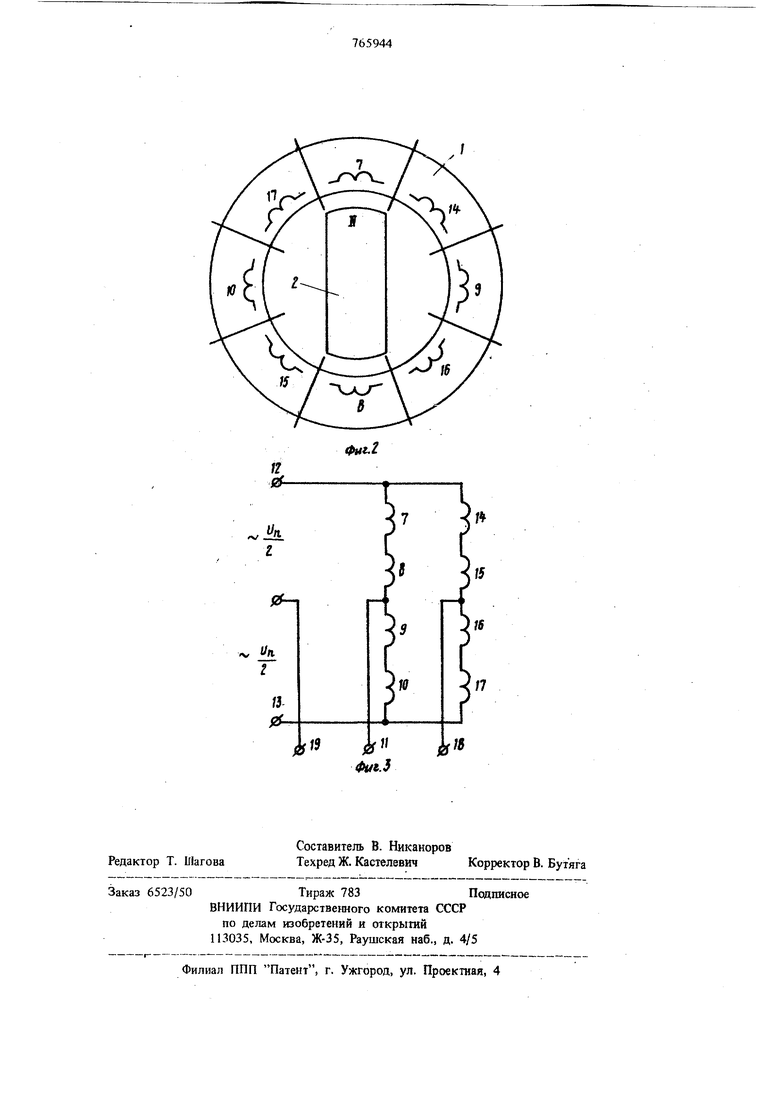
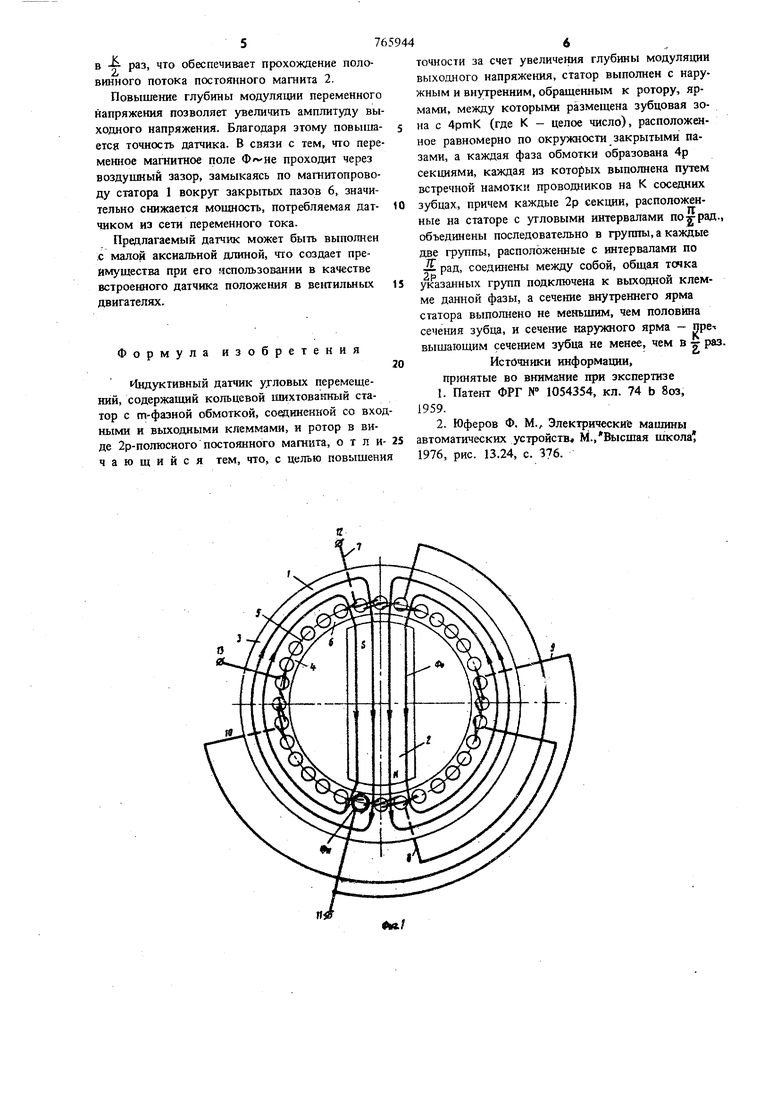
Изобретение относится к электротехнике и может быть использовано в качестве датчика углового положения вала, в частности в вентильных двигателях. Известны датчики угловых перемещений, содержащие статор с многофазной обмоткой и ферромагнитный фигурный ротор 1. Однако такие датчики имеют значительную потребляемую мощность, чю обусловлено прохождением переменного магнитного потока через воздушный зазор. . Известен также датчик угловых перемещений содержащий кольцевой шихтованный статор с т-фазной обмоткой, соединенной со входными и выходными клеммами, к ротор в виде 2рполюсного постоянного магнита 2. В известном датчике обмотка выполнена тороидальной. Изменение индуктивностей различных фаз обмотки происходит за счет подма ничивания соответствующих участков статора полем постоянного матита. При этом в потокосцеплениях фаз образуется постоянная состав ляющая, что ограничивает глубину модуляции переменного выходного напряжения и снижает точность датчика. Это является недостатком известного устройртва. Цель изобретения довышение точности за счет увеличения глубины модуляции выходного напряжения. Это достигается тем, что в датчике угловых перемещений, содержащем кольцевой шихтованный статор с т-фазной обмоткой, соединенной со входными и выходными клеммами, и ротор в виде 2р-полк)сного постоянного магнита, статор выполнен с наружным и внутренним, обращенным к ротору, ярмалш, между которыми размещена зубцовая зона с 4ртК (где К - целое число), расположенная равномерно по окружности закрытыми пазами, а каждая фаза обмотки образована 4р секциями, каждая из которых аьшолнена встречной намотки проводников на К соседних зубцах, причем каждые 2р секции, расположенные на статоре с угловыми интервалами по - рад., объединены последовательно в группы, а каждые две группы, расположенные с интервалами по j- рад., соединены между собой, общая точка указанных 37 групп подключена к вмходной клемме данной фазы. Сечение внутренного ярма статора выполнено не меньшим, чем половина сечения зубца, а сечение наружного ярма - превышающим сечение зубца не менее, чем в раз. На фиг. 1 дана конструктивная; схема предлагаемого датчика; на фиг. 2 - показано расположение сек1шй на статоре для двухфазного варианта датчика; на фиг. 3 дана схема соединения секций. Датчик (см. фиг. 1) содержит статор I и ротор 2, выполненный в виде постоянного магнита. Статор имеет два ярма - наружное 3 (боль шего сечения) и внутреннее 4 (меньшего сечения), между которыми расположена зубцовая зона с расположенными равномерно по окружности 5 закрытыми, например, круглыми пазами 6 (зубцами). Число пазов N 4ртК, где р - число пар полюсов ротора, m - число фаз обмотки, К - целое число На фиг. 1 показана одна фаза обмотки, содержащая при двухполюсном роторе 2 4р-4 секции, каждая из которых выполнена путем встречной намотки проводников на соседних зубцах 6. При , и общее число пдзов составляет N 32. Каждые секции, расположенные на статоре с угловыми интервалами по -g JT рад., т.е. секции 7 и 8 и секции 9 и 10 соединены последовательно в группы, и две группы, расположенные на стато тг 5Г ре с интервалами по 2,соединеные между собой. Общая точка указанных групп подключена к выхддной клемме 11 данной фазы, а свободные концы - к двум входным клеммам 12, 13. Секции 14-17 второй фазы (см. фиг. 2) расположены на свободных зубцах 6 статора 1 между секциями 7-10. Секции 14 и 15, а также секции 16 и 17 объединены попарно в группы (см. фиг. 3). Группы соединены между собой и подключены ко второй выходной кЛем ме 18, а свободные концы второй фазы соединены со входными клеммами 12 И 13. В полу ченной таким образам полумостовой схеме выходные напряжения двухфазного датчика снима ются с клемм 11 и 18 относительно клеммы 1 соединенной со средней точкой источника литания. При отсутствии средней точки источника пита ния обмотка двухфазного датчика может быть выполнена по мостовой схеме. При этом секции 7-10 и 14-17 наматываются двзмя параллельными проводами и соединяются, как указано выше, образуя четыре пары групп, одноименные концы которых подключаются к разноименным входным клеммам. Выходное напряжение каждой фазы датчика снимается между одноименными общими точками соответствующих групп. Общее число секций обмотки зависит от числа фаз m и числа пар полюсов ротора р. Так, например, мостовая обмотка трехфазного датчика при содержит 12 секций. Каждая из трех фаз образуется четырьмя секциями аналогично фазе двухфазного датчика и подключается к одной из трех выходных клемм, между KOTOpbjMH образуются выходные напряжения. Датчик работает следующим образом. Каждая фаза обмотки, например фаза, образованная секциями 7-10, представляет собой индуктивный делитель напряжения, в котором индуктивность каждой из двух групп, например группы секций 7 и 8, зависит от положения ротора. Магнитный поток Фо постоянного магнита 2 замыкается преимущественно по наружному ярму 3 статора 1, имеющему большое сечение. При этом в положении, показанном на фиг. I, он подмагничивает зоны расположения секций 7 и 8, и не затрагивает зоны расположения секций 9 и 10, поэтому секдаи 9 и 10 ,обладают максимальной индуктивностью, а секции 7 и 8 - минимальной. При этом переменное напряжение , приложенное к клеммам 12, 13, вьщеляется преимущественно на клеммах 11, 13. При повороте ротора на-j рад. соотношение индуктивностей изменяется на обратное, а при повороте на я рад становится аналогичным исходному. В результате напряжение на клемме 11 относительно клеммы 19 (см. фиг. 3) изменяется в функции двойного угла поворота по периодическому закону, который мо:жет быть установлен, в частности, синусоидальным за счет соответствующего выбора геометрии ротора. Магнитный поток Фо постоянного магнита 2 проходит через соседние зубцы статора (см. фиг. 1).Поскольку проводники секции намотаны на соседних зубцах 6 встречно, постоянная составляющая в потокосцеплении секции и, следовательно, всей фазы уничтожается. Благодаря этому повьпиается. глубина модуляции выходного напряжения датчика. Для правильной работы устройства необходимо, чтобы постоянный магнит 2 обеспечивал сильное насыщение К соседних зубцов и свободно проходил по наружному ярму 3, не насыщая его. Сечение внутреннего ярма 4, обеспечивающего прохождение только переменного магнитного потока Ф, , должно быть не меньшим, чем половина сечения зубца 6, а сечение наружного ярма 3 - превышающим сечение зубца 6 не менее, чем в -g- раз, что обеспечивает прохождение половинного потока постоянного магнита 2. Повышение глубины модуляции переменного напряжения позволяет увеличить амплитуду вы ходного напряжения. Благодаря этому повьнпается точность датчика. В связи с тем, что пере менное магнитное поле проходит через воздушный зазор, замыкаясь по машитопроводу статора 1 вокруг закрытых пазов 6, значительно снижается мощность, потребляемая датчиком из сети переменного тока. Предлагаемый датчик может быть вьшолнен с малой аксиальной длиной, что создает преимущества при его использовании в качестве встроенного датчика положения в вентильных двигателях. Формула изобретения Индуктивный датчик угловых перемещений, содержащий кольцевой шихтованный статор с т-фазной обмоткой, соединекной со вход ными и выходными клеммами, и ротор в виде 2р-полюсного постоянного магнита, о т л ичающийся тем, что, с целью повышени точности за счет увеличения глубины модуляции выходного напряжения, статор вьшолнен с наружным и внутренним, обращенным к ротору, ярмами, между которыми размешена зубцовая зона с 4ртК (где К - целое число), расположенное равномерно по окружности закрытыми пазами, а каждая фаза обмотки образована 4р секциями, каждая из которых выполнена путем встречной намотки проводников на К соседних зубцах, причем каждые 2р секции, расположенные на статоре с угловыми интервалами по 5 рад., объединены последовательно в группы, а каждые две группы, расположенные с интервалами по Ж рад, соединены между собой, общая тсяка указанных групп подключена к выходной клемме данной фазы, а сечение внутреннего ярма статора выполнено не меньшим, чем половина сечения зубца, и сечение наружного ярма - пре- вышающим сечением зубца не менее, чем в г- раз. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 1054354, кл. 74 b 8оз, 1959. 2.Юферов Ф, М., Электрические машины втоматических устройств М.,Высшая школа 1976, рис. 13.24, с. 376.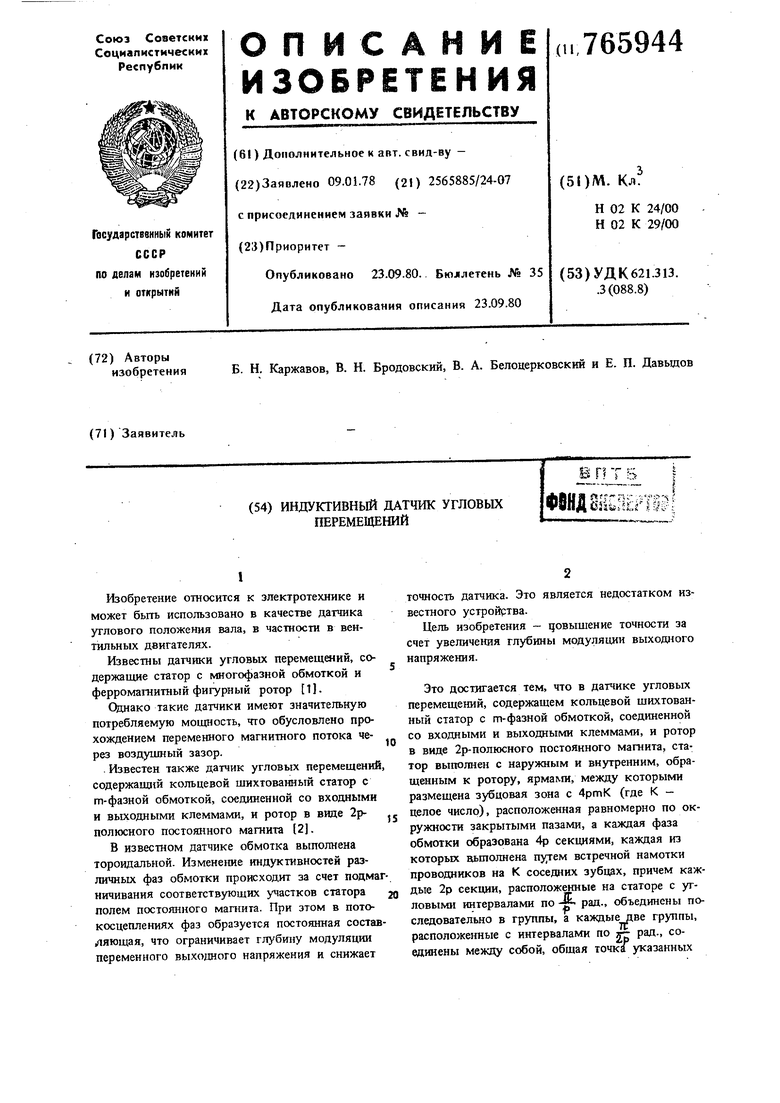

| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик угловых перемещений | 1978 |
|
SU1034129A2 |
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |
| Датчик углового положения | 1984 |
|
SU1226038A1 |
| Магнитомодуляционный датчикпОлОжЕНия | 1979 |
|
SU853376A1 |
| Датчик углового положения с электромагнитной редукцией | 1988 |
|
SU1603188A1 |
| Магнитомодуляционный датчик углового перемещения | 1982 |
|
SU1060936A1 |
| Датчик углового положения с электромагнитной редукцией | 1981 |
|
SU954810A1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| Совмещенный синхронный двигатель-тахогенератор | 1980 |
|
SU930513A1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |